clc;
clear all;
tic;
%data = csvread(‘G:\桌面文件\chuanganqi.csv’,2,5,[2 5 2000 5]);
%X = csvread(‘G:\桌面文件\chuanganqi.csv’,2,5,[2 5 2000 5]);
X = csvread(‘G:\桌面文件\chuanganqi.csv’,2,5);
%X = data(1:720000,1)*3600; %读取数据,以陀螺仪某一轴为例
%X = data(2:2000)*3600
Ts = 0.01; %采样时间
[N,M] = size(X);
N_max = floor(N/3);%(N/3)
T = zeros(N_max,10);
R = zeros(N_max,10);
for d = 1 %设置迭代的步长为d,当d=1时为传统的Allan方差
Allan = zeros(N_max,2);
Cluster_mean = zeros(N,1);
for n = 1:d:N_max %每一簇的簇长
K = floor(N/n);
for k = 1:K
Cluster_mean(k,1) = mean(X((n*(k-1)+1):(n
k),1));
end
Cluster_diff = diff(Cluster_mean(1:K),1);
Allan(n,1) = n
Ts; %Time tau
Allan(n,2) = sum((Cluster_diff.^2))/(2*(K-1));
end
Allan(any(Allan,2)==0,:)=[]
TUP = ceil(N_max/d);
RUP = ceil(N_max/d);
T(1:TUP,d)=Allan(:,1);
R(1:RUP,d)=Allan(:,2);
end
x1 = T(:,1);
y1 = R(:,1);
a= [1 2 3 4 5];%函数拟合过程
a(1:5)=lsqcurvefit(@test,a,x1,y1);
f=a(1)*x1.
(-2)+a(2)*x1.
(-1)+a(3)*x1.
(0)+a(4)*x1.
(1)+a(5)*x1.^(2);
figure(1)=figure(‘color’,[1 1 1]);
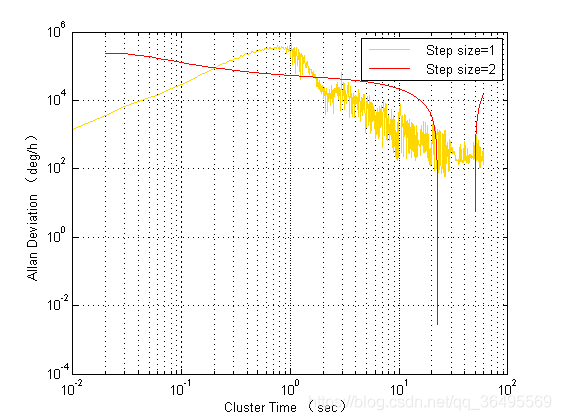
loglog(T(:,1),R(:,1),‘color’,[255/255,215/255,0/255]);
hold on;
loglog(x1, f,‘r’,‘LineWidth’,1.3);
hold on;
xlabel(‘Cluster Time (sec)’);
ylabel(‘Allan Deviation (deg/h)’);
grid on;
legend(’ Step size=1’,’ Step size=2’,’ Step size=3’,’ Fitting Curve’)
toc;
test
function f=test(a,x)
f=a(1)*x.
(-2)+a(2)*x.
(-1)+a(3)*x.
(0)+a(4)*x.
(1)+a(5)*x.^(2);
end