ros::package::getPath使用方法
1 作用
ros中用于获取某个功能包的绝对路径,当功能包不存在时,该函数返回一个空的字符串。其函数原型如下:
std::string ros::package::getPath (const std::string &package_name)
2 使用时遇到的问题
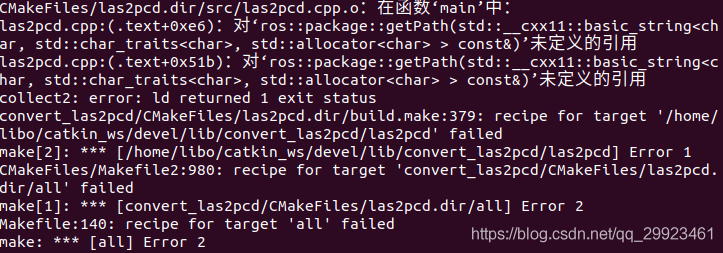
3 解决方法
1)包含头文件
#include <ros/package.h>
2)修改CMakeLists.txt文件
(1)在find_package()添加roslib,如下所示:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
roslib
)
(2)在target_link_libraries()中添加${catkin_LIBRARIES},如下所示:
target_link_libraries(pcd_read ${catkin_LIBRARIES})
其中,pcd_read是生成的可执行文件名,根据实际情况进行修改。
3)修改package.xml文件
添加如下代码:
<build_depend>roslib</build_depend>
<exec_depend>roslib</exec_depend>
4 正确用法
最后,可以在源代码文件中按照如下方式使用:
std::string pcdFileName = ros::package::getPath("convert_las2pcd") + "/pcd/pointcloud.pcd";
pcl::io::savePCDFileASCII(pcdFileName.c_str(), cloud);
版权声明:本文为qq_29923461原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。