1、
MC_GearIn 是最常用的电子齿轮关联工具
MC_GearOut 是解除跟随的功能块
2、使用电子齿轮时,从轴会至少有 2 倍的 POWERLINK 通讯周期时间的滞后。
Powerlink 的通讯周期是 20000 微秒
3、无限旋转的电机的设置
PLCOpen_ModPos=”a,b”这个指令中 a 是多少,就是会在位置到达后自动变回 0,b 表示电机转几圈能走 a个单位
4、电子齿轮比的设置

上图用作电子齿轮的时候,在 MAPP 中设置主从的比例,D 的是主轴,N 的是从轴,分别表示主轴转 360 个单位,对应的从轴也会转-720 个单位。且是主轴每转 360 个单位会和从轴对比,这就表明同样是 1 比-2 的比值,设置成 360:-720,比设置成 1:-2 对 CPU 来说会轻松很多,因为第一种主轴每运行 360 个单位才会和从轴对比一次。
当用作电子凸轮的时候,这里的分子分母是要乘以凸轮表里加的点的值。而凸轮表中的的数值,都是默认的以圈数为单位的。综上,减速比的分子分母一般都设置成 电机一圈对应的单位个数。
5、两个时间的设置,(用以消除主从轴的设定滞后误差)重要
计算方法T_total(master)=t_predict(master)+t_total(slave)+2*PLK

6、新建凸轮表
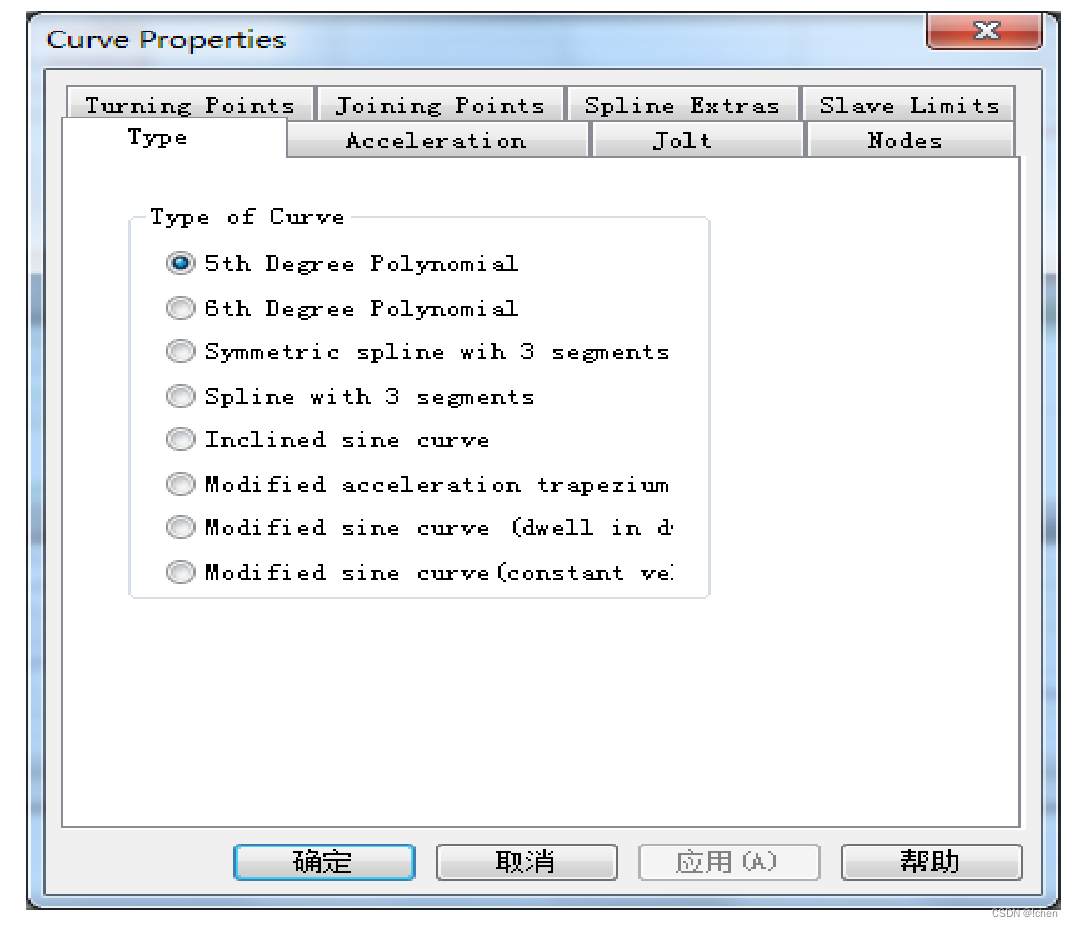
7、在图表上右键选择 曲线属性 可以选择设定生成样条曲线时的计算方式
在使用凸轮前要定义用哪个凸轮表,并写进 MpAxisCoupling 的 parameter 中。