ArduPilot开源代码之AP_Logger
1. 源由
日志对于程序来说相辅相成,历史由来已久。
鉴于传感器数据高速采集和存储器的慢速存储问题,尤其在实际日志记录过程中,重点是针对问题或者关注的数据进行记录,不太可能将所有的数据都记录下来(也没有必要)。
ArduPilot的日志模块部分,这里从整体做个介绍,以便大家对日志有更像详细的了解。
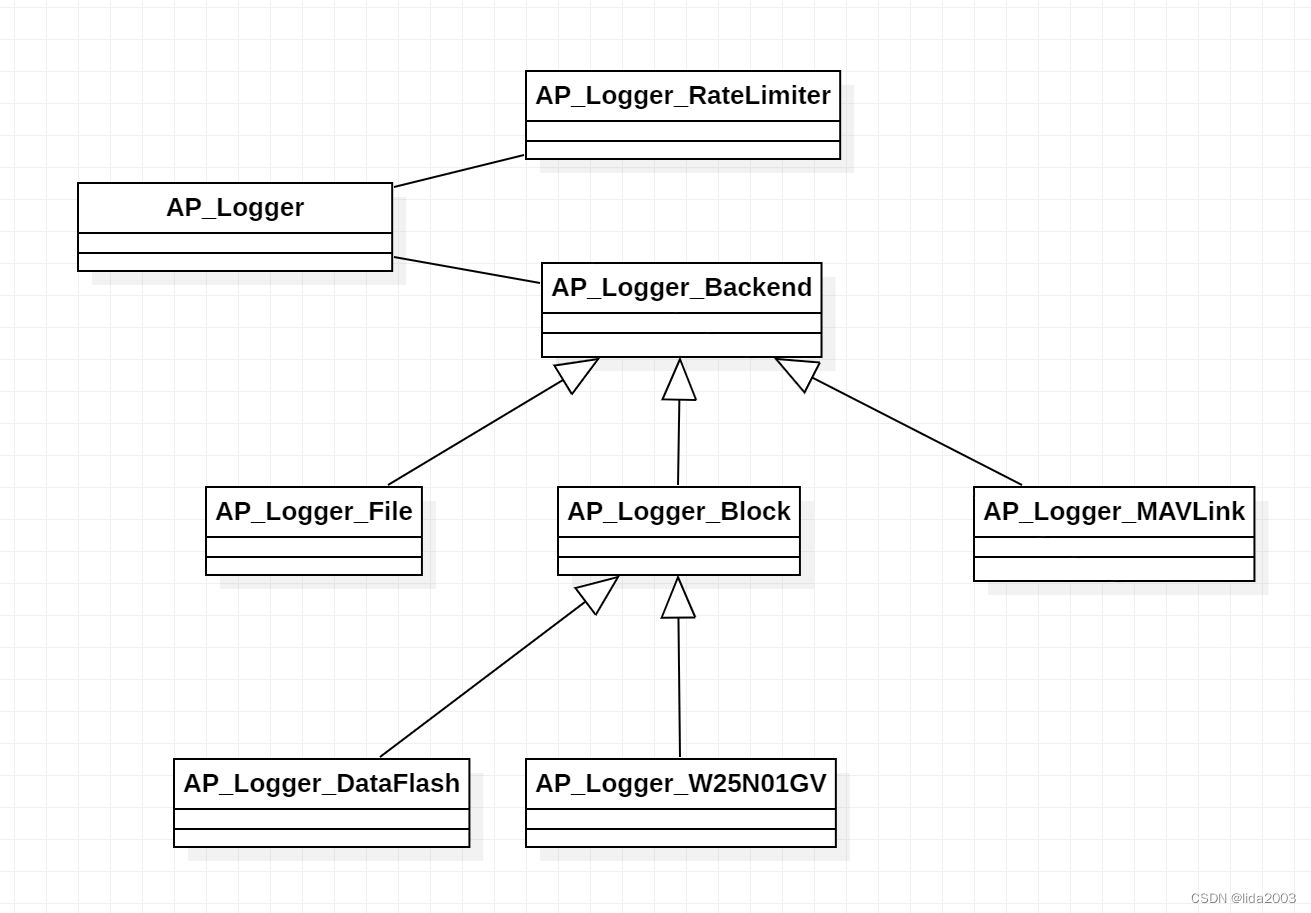
2. Logger类
- AP_Logger
- AP_Logger_RateLimiter
- AP_Logger_Backend
- AP_Logger_File
- AP_Logger_MAVLink
- AP_Logger_Block
- AP_Logger_DataFlash
- AP_Logger_W25N01GV
2.1 Copter初始化
应用类的初始化总是有个init函数处理,启动过程可参考:
ArduPilot飞控启动&运行过程简介
。
AP_Vehicle::setup
└──> init_ardupilot
└──> Copter::log_init
└──> AP_Logger::Init
初始化最终要根据硬件芯片进行特定的初始化逻辑,鉴于H743 Dual BIM270这块板子使用的是W25N01GV,详见配置文件。

AP_Logger::Init
├──> _params.file_bufsize.convert_parameter_width(AP_PARAM_INT8) //convert from 8 bit to 16 bit LOG_FILE_BUFSIZE
├──> <hal.util->was_watchdog_armed()>
│ ├──> GCS_SEND_TEXT(MAV_SEVERITY_INFO, "Forcing logging for watchdog reset")
│ └──> _params.log_disarmed.set(LogDisarmed::LOG_WHILE_DISARMED)
├──> <CONFIG_HAL_BOARD == HAL_BOARD_SITL>
│ ├──> validate_structures(structures, num_types)
│ └──> dump_structures(structures, num_types)
├──> <Backend_Type::BLOCK> AP_Logger_W25N01GV::probe
├──> backends[i]->Init
├──> start_io_thread
└──> EnableWrites(true)
注1:如果
Backend_Type
是
FILESYSTEM
则需要使用
AP_Logger_File::probe
;若
Backend_Type
是
MAVLINK
则需要使用
AP_Logger_MAVLink::probe
。
// start the update thread
void AP_Logger::start_io_thread(void)
{
WITH_SEMAPHORE(_log_send_sem);
if (_io_thread_started) {
return;
}
if (!hal.scheduler->thread_create(FUNCTOR_BIND_MEMBER(&AP_Logger::io_thread, void), "log_io", HAL_LOGGING_STACK_SIZE, AP_HAL::Scheduler::PRIORITY_IO, 1)) {
AP_HAL::panic("Failed to start Logger IO thread");
}
_io_thread_started = true;
return;
}
注2:这里
start_io_thread
开启了一个io线程来处理存储任务
AP_Logger::io_thread
,后面我们会对其做简单的介绍。
2.2 Copter任务
- Copter::ten_hz_logging_loop
- Copter::twentyfive_hz_logging
- AP_Logger::periodic_tasks
这里看出,实际日志记录使用有两处与设备应用紧密结合,而常规AP_Logger应用处理的是
periodic_tasks
。
#if LOGGING_ENABLED == ENABLED
SCHED_TASK(ten_hz_logging_loop, 10, 350, 114),
SCHED_TASK(twentyfive_hz_logging, 25, 110, 117),
SCHED_TASK_CLASS(AP_Logger, &copter.logger, periodic_tasks, 400, 300, 120),
#endif
3. 实例理解
根据日志应用的情况展开研读和讨论,希望从应用场景进而理解日志类的继承和实现。
3.1 Copter设备应用任务
3.1.1 Copter::ten_hz_logging_loop
AP_Scheduler
保证10Hz遍历,并在标志位的作用下,记录相关飞行数据。
Copter::ten_hz_logging_loop
├──> <should_log(MASK_LOG_ATTITUDE_MED) && !should_log(MASK_LOG_ATTITUDE_FAST) && !copter.flightmode->logs_attitude()>
│ └──> Log_Write_Attitude
├──> <!should_log(MASK_LOG_ATTITUDE_FAST) && !copter.flightmode->logs_attitude()>
│ └──> Log_Write_PIDS
├──> <!should_log(MASK_LOG_ATTITUDE_FAST)>
│ └──> Log_Write_EKF_POS
├──> <should_log(MASK_LOG_MOTBATT)>
│ └──> motors->Log_Write
├──> <should_log(MASK_LOG_RCIN)>
│ ├──> logger.Write_RCIN
│ └──> <rssi.enabled()>
│ └──> logger.Write_RSSI
├──> <should_log(MASK_LOG_RCOUT)>
│ └──> logger.Write_RCOUT
├──> <should_log(MASK_LOG_NTUN) && (flightmode->requires_GPS() || landing_with_GPS() || !flightmode->has_manual_throttle())>
│ └──> pos_control->write_log
├──> <should_log(MASK_LOG_IMU) || should_log(MASK_LOG_IMU_FAST) || should_log(MASK_LOG_IMU_RAW)>
│ └──> AP::ins().Write_Vibration
├──> <should_log(MASK_LOG_CTUN)>
│ ├──> attitude_control->control_monitor_log
│ ├──> <HAL_PROXIMITY_ENABLED> g2.proximity.log
│ └──> <AP_BEACON_ENABLED> g2.beacon.log
├──> <FRAME_CONFIG == HELI_FRAME> Log_Write_Heli
└──> <AP_WINCH_ENABLED> <should_log(MASK_LOG_ANY)> g2.winch.write_log
3.1.2 Copter::twentyfive_hz_logging
AP_Scheduler
保证25Hz遍历,并在标志位的作用下,记录相关飞行数据。
Copter::twentyfive_hz_logging
├──> <should_log(MASK_LOG_ATTITUDE_FAST)>
│ └──> Log_Write_EKF_POS
├──> <should_log(MASK_LOG_IMU) && !(should_log(MASK_LOG_IMU_FAST))>
│ └──> AP::ins().Write_IMU()
├──> <MODE_AUTOROTATE_ENABLED == ENABLED> <should_log(MASK_LOG_ATTITUDE_MED) || should_log(MASK_LOG_ATTITUDE_FAST)>
│ └──> g2.arot.Log_Write_Autorotation
└──> <HAL_GYROFFT_ENABLED> <should_log(MASK_LOG_FTN_FAST)>
└──> gyro_fft.write_log_messages
3.2 AP_Logger应用类任务
3.2.1 AP_Logger::periodic_tasks
AP_Scheduler
保证400Hz遍历,并在标志位的作用下,记录相关飞行数据。
AP_Logger::periodic_tasks
├──> <HAL_BUILD_AP_PERIPH> handle_log_send
└──> FOR_EACH_BACKEND(periodic_tasks())
3.2.2 AP_Logger::io_thread
使用OS线程进行1KHz的频率对存储系统进行相关任务操作。
AP_Logger::io_thread
└──> loop(1)
├──> [delay MAX(1000 - (now - last_run_us), 250)]
├──> FOR_EACH_BACKEND(io_timer())
├──> <now - last_stack_us > 100000U> hal.util->log_stack_info()
├──> <!done_crash_dump_save && now - last_crash_check_us > 5000000U> check_crash_dump_save
└──> file_content_update
4. H743 Dual – W25N01GV
由于H743 Dual BIM270这块板子使用的是W25N01GV,接下来我们看下
AP_Logger_W25N01GV
重要的几个具体实现。
4.1 AP_Logger_W25N01GV::probe
C++对象new一个实例出来,把该设备对象创建出来,用于后续的硬件设备管理。
static AP_Logger_Backend *probe(AP_Logger &front,
LoggerMessageWriter_DFLogStart *ls) {
return new AP_Logger_W25N01GV(front, ls);
}
4.2 AP_Logger_W25N01GV::Init
通过定义的SPI总线,对SPI-Flash芯片进行硬件检测和芯片初始化。
void AP_Logger_W25N01GV::Init()
{
dev = hal.spi->get_device("dataflash");
if (!dev) {
AP_HAL::panic("PANIC: AP_Logger W25N01GV device not found");
return;
}
dev_sem = dev->get_semaphore();
if (!getSectorCount()) {
flash_died = true;
return;
}
flash_died = false;
// reset the device
WaitReady();
{
WITH_SEMAPHORE(dev_sem);
uint8_t b = JEDEC_DEVICE_RESET;
dev->transfer(&b, 1, nullptr, 0);
}
hal.scheduler->delay(W25N01G_TIMEOUT_RESET_MS);
// disable write protection
WriteStatusReg(W25N01G_PROT_REG, 0);
// enable ECC and buffer mode
WriteStatusReg(W25N01G_CONF_REG, W25N01G_CONFIG_ECC_ENABLE|W25N01G_CONFIG_BUFFER_READ_MODE);
printf("W25N01GV status: SR-1=0x%x, SR-2=0x%x, SR-3=0x%x\n",
ReadStatusRegBits(W25N01G_PROT_REG),
ReadStatusRegBits(W25N01G_CONF_REG),
ReadStatusRegBits(W25N01G_STATUS_REG));
AP_Logger_Block::Init();
}
4.4 AP_Logger_Block::Init
SPI属于块设备,需要进行相应的一些块设备初始化。该函数在
AP_Logger_W25N01GV::Init
中调用。
void AP_Logger_Block::Init(void)
{
// buffer is used for both reads and writes so access must always be within the semaphore
buffer = (uint8_t *)hal.util->malloc_type(df_PageSize, AP_HAL::Util::MEM_DMA_SAFE);
if (buffer == nullptr) {
AP_HAL::panic("Out of DMA memory for logging");
}
//flash_test();
if (CardInserted()) {
// reserve space for version in last sector
df_NumPages -= df_PagePerBlock;
// determine and limit file backend buffersize
uint32_t bufsize = _front._params.file_bufsize;
if (bufsize > 64) {
bufsize = 64;
}
bufsize *= 1024;
// If we can't allocate the full size, try to reduce it until we can allocate it
while (!writebuf.set_size(bufsize) && bufsize >= df_PageSize * df_PagePerBlock) {
DEV_PRINTF("AP_Logger_Block: Couldn't set buffer size to=%u\n", (unsigned)bufsize);
bufsize >>= 1;
}
if (!writebuf.get_size()) {
DEV_PRINTF("Out of memory for logging\n");
return;
}
DEV_PRINTF("AP_Logger_Block: buffer size=%u\n", (unsigned)bufsize);
_initialised = true;
}
WITH_SEMAPHORE(sem);
if (NeedErase()) {
EraseAll();
} else {
validate_log_structure();
}
}
4.5 AP_Logger_Block::io_timer
定时循环对块设备进行相应的擦除,写入操作。这里非常类似Linux驱动创建了一个内核任务。
void AP_Logger_Block::io_timer(void)
{
uint32_t tnow = AP_HAL::millis();
io_timer_heartbeat = tnow;
// don't write anything for the first 2s to give the dataflash chip a chance to be ready
if (!_initialised || tnow < 2000) {
return;
}
if (erase_started) {
WITH_SEMAPHORE(sem);
if (InErase()) {
return;
}
// write the logging format in the last page
StartWrite(df_NumPages+1);
uint32_t version = DF_LOGGING_FORMAT;
memset(buffer, 0, df_PageSize);
memcpy(buffer, &version, sizeof(version));
FinishWrite();
erase_started = false;
chip_full = false;
status_msg = StatusMessage::ERASE_COMPLETE;
return;
}
if (df_EraseFrom > 0) {
WITH_SEMAPHORE(sem);
const uint32_t sectors = df_NumPages / df_PagePerSector;
const uint32_t block_size = df_PagePerBlock * df_PageSize;
const uint32_t sectors_in_block = block_size / (df_PagePerSector * df_PageSize);
uint32_t next_sector = get_sector(df_EraseFrom);
const uint32_t aligned_sector = sectors - (((df_NumPages - df_EraseFrom + 1) / df_PagePerSector) / sectors_in_block) * sectors_in_block;
while (next_sector < aligned_sector) {
Sector4kErase(next_sector);
io_timer_heartbeat = AP_HAL::millis();
next_sector++;
}
uint16_t blocks_erased = 0;
while (next_sector < sectors) {
blocks_erased++;
SectorErase(next_sector / sectors_in_block);
io_timer_heartbeat = AP_HAL::millis();
next_sector += sectors_in_block;
}
status_msg = StatusMessage::RECOVERY_COMPLETE;
df_EraseFrom = 0;
}
if (!CardInserted() || new_log_pending || chip_full) {
return;
}
// we have been asked to stop logging, flush everything
if (stop_log_pending) {
WITH_SEMAPHORE(sem);
log_write_started = false;
// complete writing any previous log, a page at a time to avoid holding the lock for too long
if (writebuf.available()) {
write_log_page();
} else {
writebuf.clear();
stop_log_pending = false;
}
// write at most one page
} else if (writebuf.available() >= df_PageSize - sizeof(struct PageHeader)) {
WITH_SEMAPHORE(sem);
write_log_page();
}
}
5. 总结
通过
AP_Logger
模块的代码初步研读,整个日志的应用是如何初始化?如何日志记录?如何驱动更新数据?应该都能很好的找到入口点。
通过研读,希望能够从代码框架的角度,更好的理解设计。当我们需要新增一些内容的时候,可以有的放矢。
比如:
- 移植新的SPI-Flash芯片驱动
- 新增应用日志记录
- 调整日志记录频率
-
定位日志应用的异常问题
等等。。。 。。。
6. 参考资料
【1】
ArduPilot开源飞控系统之简单介绍
【2】
ArduPilot之开源代码框架
【3】
ArduPilot飞控之ubuntu22.04-SITL安装
【4】
ArduPilot飞控之ubuntu22.04-Gazebo模拟
【5】
ArduPilot飞控之Mission Planner模拟
【6】
ArduPilot飞控AOCODARC-H7DUAL固件编译
【7】
ArduPilot之开源代码Library&Sketches设计
【8】
ArduPilot之开源代码Sensor Drivers设计
【9】
ArduPilot之开源代码基础知识&Threading概念
【10】
ArduPilot之开源代码UARTs and the Console使用
【11】
ArduPilot飞控启动&运行过程简介
【11】
ArduPilot之开源代码Task介绍
【12】
ArduPilot开源代码之AP_Param
【13】
ArduPilot开源代码之AP_Scheduler
【14】
ArduPilot开源代码之AP_VideoTX
【15】
ArduPilot开源代码之AP_InertialSensor_Backend
【16】
ArduPilot开源代码之AP_InertialSensor