版权声明:本文为博主原创文章,转载请联系博主。
https://mp.csdn.net/mdeditor/82764989#
DWA(动态窗口算法)
算法概述
算法原理可见:
https://blog.csdn.net/heyijia0327/article/details/44983551
此方法部分代码来自于ROS_Navigation包的源码,部分来自于项目中的改编:
通过线速度与角速度的交叉组合可以得出多组速度采样空间,依次可以通过车辆运动学模型(自行车模型)得出多组轨迹空间,由以下三组评价函数对每条轨迹进行评价:
- 生成轨迹与参考路径的距离(贴合程度)
- 生成轨迹与参考路径终点的距离
- 生成轨迹上是否存在障碍物(若有则抛弃这条轨迹)
优点:
- 反应速度较快,计算不复杂,通过速度组合(线速度与角速度)可以快速得出下一时刻规划轨迹的最优解.
- 可以将优化由横向与纵向两个维度向一个维度优化
缺点:
- 此算法是由机器人避障衍生而来,机器人的路径规划算法主要体现在较高的灵活性和其静态环境,譬如某些特种车辆的工作环境,是一个较大的开阔广场,因此是比较适用此算法的
- 无人驾驶则要求较高的稳定性和动态环境,主要是结合车道线信息来实现规划算法
- 较高的灵活性会极大的降低行驶的平稳性
- 个人认为这是避障算法载体由机器人向无人车平台移植过程中会产生的主要问题
算法流程图如下图所示
:
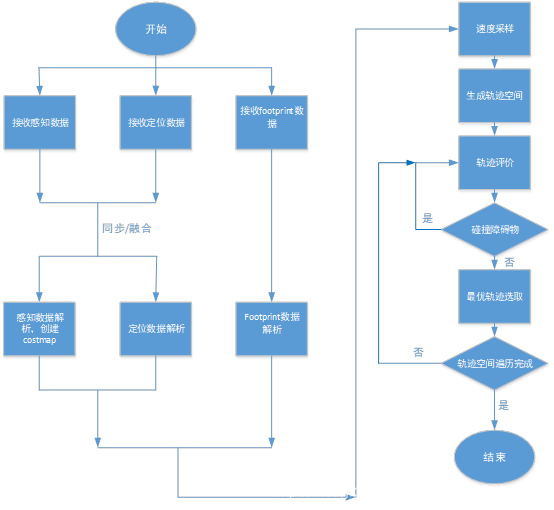
后面会针对流程图中各个子模块进行分析与详述,还请继续关注系列后续博客
版权声明:本文为weixin_40884570原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。