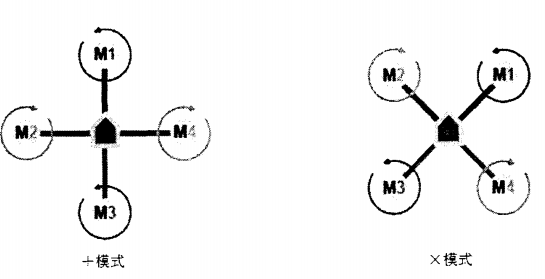
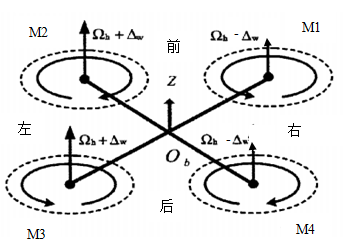
根据四旋翼对称的组成结构有两种飞行姿态,一种是根据四旋翼十字对称的结构,将处于同一水平线的一对机架梁作为x轴另一对梁作为y轴的“+”型飞行姿态,另一种是将相应两个梁的对称轴线作为x轴,另一条对称轴线作为y轴的“X”型飞行姿态。
(a) (b)
图2-3 四旋翼的飞行姿态
(1)“+”型飞行姿态飞行原理
“+”型飞行姿态如图2-3(a)所示。“+”型飞行姿态实现垂直运动需要将M1、M2、M3、M4四个电机的转速同时增大或减小,如图2-4(a)所示。如果想让飞行器进行前后移动,实现俯仰运动,当将M1的转速减小或者将M3的转速增大,保持M2、M4的转速不变的时候,四旋翼后会产生向前上方的合力,使四旋翼向前飞行。当将M1的转速增大或者将M3的转速减小,保持M2、M4的转速不变的时候,四旋翼后会产生向后上方的合力,使四旋翼向后飞行,如图2-4(b)所示。如果控制四旋翼左右飞行,实现滚转运动,需要增加M2或减小M4的转速,保持M1、M3的转速不变,这样会产生右上方的合力,使四旋翼向右飞行。当减小M2或者增加M4的转速,同样保持M1、M3的转速不变时,四旋翼会产生向左上方的合力,使四旋翼向左飞行,如图2-4(c)所示。如果想让飞行器左右转向,实现偏航运动,将M1、M3的转速增加或者将M2、M4的转速减小,四旋翼会向右旋转,实现向右偏航。反之,如果将M1、M3的转速减小或者将M2、M4的转速增加,四旋翼会向左旋转,实现向左偏航,如图2-4(d)所示。
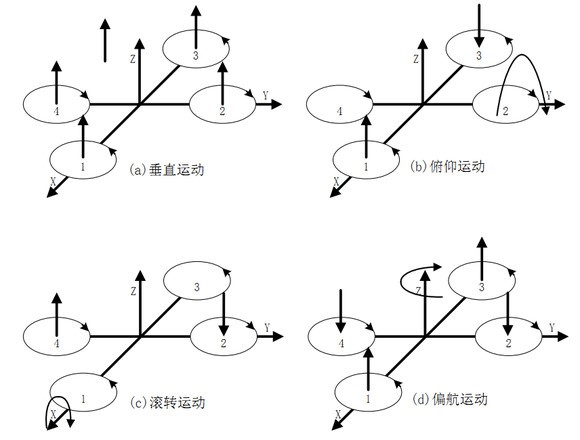
图2-4 “+”型飞行姿态飞行原理图
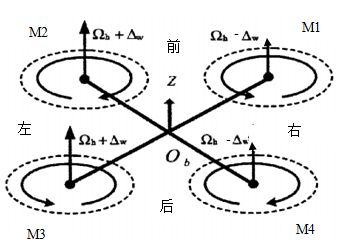
(2)“X”型飞行姿态飞行原理
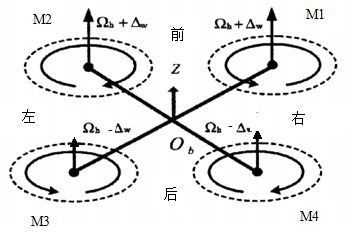
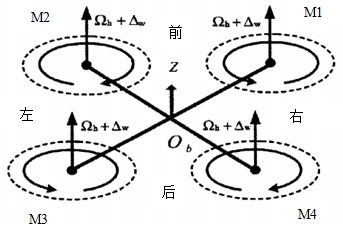
“X”型飞行姿态如图2-3(b)所示。“X”型飞行姿态垂直运动与“+”型飞行姿态相同,只要同时增加或者减小电机M1、M2、M3、M4的转速就能让飞行器实现垂直运动,如图2-5(a)所示。如果想让四旋翼前后飞行,实现俯仰运动,如果将M1、M2的转速减小或者将M3、M4增加时,四旋翼会产生向前上方的力,使四旋翼向前飞行。反之,如果将M1、M2的转速增加或者将M3、M4减小时,四旋翼会产生向后上方的力,使四旋翼向后飞行,如图2-5(b)所示。如果想让四旋翼左右飞行,实现滚转运动,如果将电机M2、M3的转速增加或者将M1、M3的转速减小时,四旋翼会产生向右上方的合力,使四旋翼向右飞行。反之,如果减小M2、M3的转速或者增加M1、M4的转速,四旋翼会产生向左上方的合力,使四旋翼向左飞行,如图2-5(c)所示。如果想让四旋翼左右转向,实现偏航运动,将M1、M3的转速增加或者将M2、M4的转速减小,四旋翼会向右旋转,实现向右偏航。反之,如果将M1、M3的转速减小或者将M2、M4的转速增加,四旋翼会向左旋转,实现向左偏航,如图2-5(d)所示。
(a)垂直运动 (b)仰俯运动
(c)滚转运动 (d)偏航运动
图2-5 “X”型飞行姿态飞行原理
四旋翼飞行姿态为“X”型飞行姿态,这种飞行姿态在控制时,可以通过同时控制四个电机的转速来控制四旋翼的飞行姿态,相比“+”型飞行姿态来说控制要复杂,但是,通过同时控制四个电机的方法控制飞行姿态的联动性较好。