由于我安装的Ubuntu是18.04
故安装ROS Melodic Morenia
安装步骤:
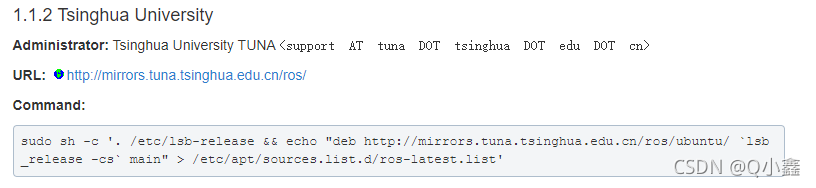
1、设置安装源
由于我设置的镜像是
清华镜像
故:
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main” > /etc/apt/sources.list.d/ros-latest.list’
2、设置密钥
sudo apt-key adv –keyserver ‘hkp://keyserver.ubuntu.com:80’ –recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新软件包
sudo apt-get update
4、安装ROS
sudo apt-get install ros-melodic-desktop-full
桌面完整版:包含ROS、rqt、rviz、机器人通用库、2D/3D模拟器、导航以及2D/3D感知包
5.初始化rosdep
sudo rosdep init
rosdep update
一般这一步很容易出错,具体解决方案看我另外一篇ROS安装教程
https://blog.csdn.net/qq_42108414/article/details/120841615
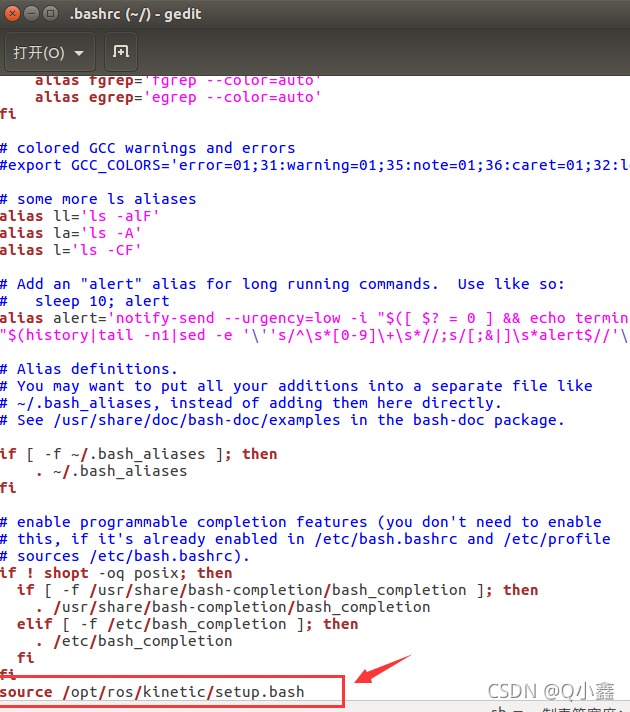
6、设置环境
echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc
查看是否写入
gedit ~/.bashrc
7、安装一些依赖包
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
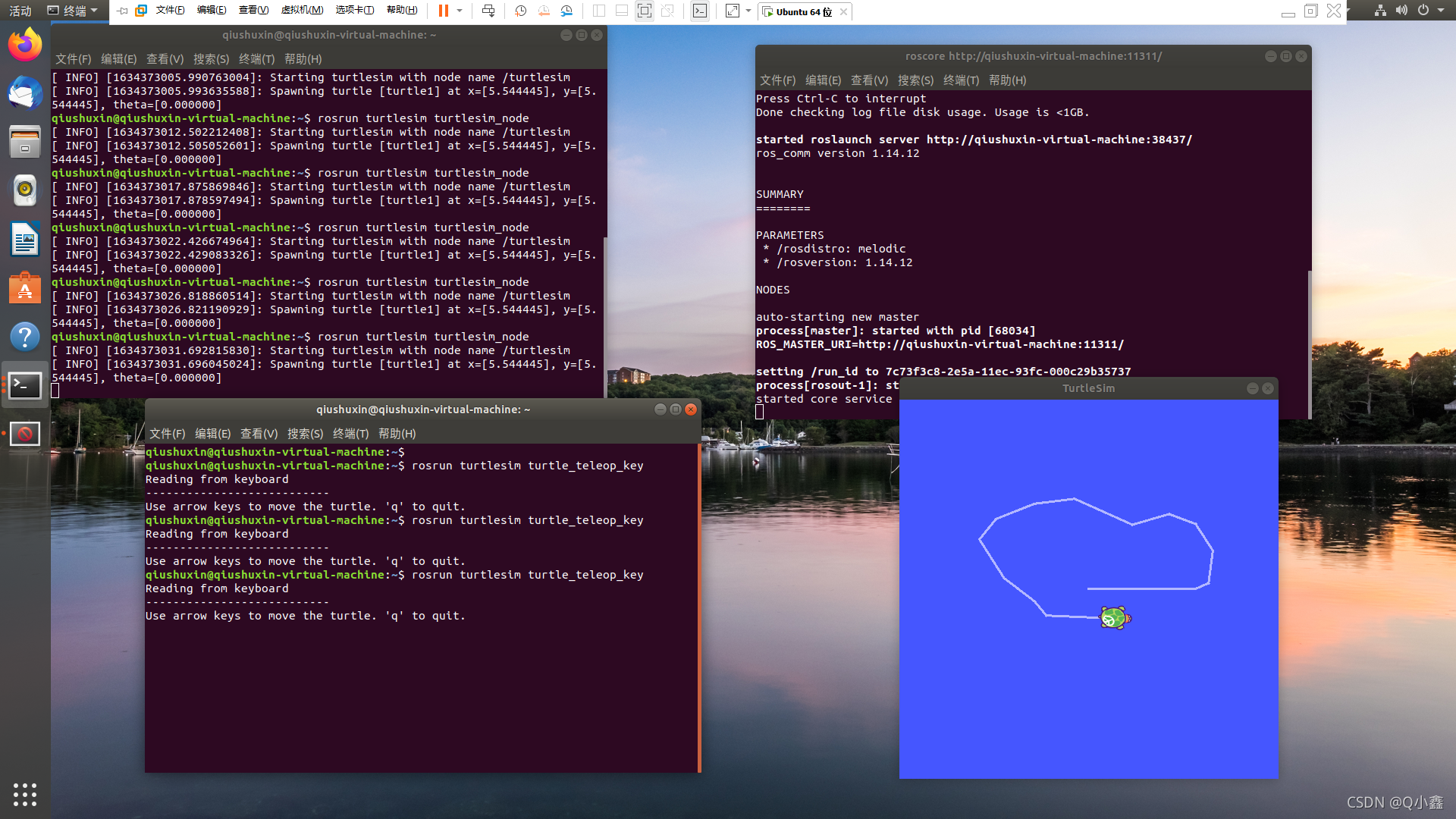
8、测试!!!
注意要开三个终端窗口哦!
1)启动ROS
roscore
2)启动小海龟仿真器
rosrun turtlesim turtlesim_node
3)启动海龟控制节点
rosrun turtlesim turtle_teleop_key
注意要控制海龟的话必须在3的控制终端上,否则移动不了。