在您阅读本文之前:
开发环境参照
https://blog.csdn.net/zhangchao19890805/article/details/78781003
正文开始。
学习 TensorFlow 让我的思维发生了变化。
计算机本质上是一种数学的工具,而我在学习编程的时候,思维也不可避免地收到了影响。传统的编程思想,常常认为程序就应该像数学定理或者数学函数一样,给出一个确定的结果。这是一种基于逻辑推导的思维习惯。
然而,做实验的科学家们的思维却不像数学家一样。实验科学家通过做实验收集数据,再根据数据推测其中蕴含的某种规律。
这篇文章以胡克定律为例子,向新手介绍如何使用TF。胡克定律是由物理学家胡克发现。简单地说,这个定律指弹簧长度的增量和弹簧受力大小呈正比关系。(注:这并不是胡克定律的严格定义,只是为了方便读者理解而作的简化说明。这个说法更像中学物理对胡克定律的说明。)
现在假设你是一个实验物理学家,要探索弹簧长度增量和受力大小之间的关系。你对一个弹簧施加了不同的力,并记录下了弹簧的增量(数据都是我瞎编的),存储到一个CSV文件中。文件名是 HookeLaw.csv
HookeLaw.csv文件内容
"force","length_variation"
8.0,3.9
4.3,2.2
5.7,3
7.2,4.1
10,5.2
21,9.0
14.5,7.1
11.3,5.8
12.3,6.1
21.3,10.5
18.2,9.8
21.3,10.8
21.5,10
19.1,9.8
32.3,15.9
28.3,14.0
33.3,16.2
30.3,15.5
31.7,17.1
29.9,14.6
30.5,14.9
34.5,17
9.9,10
35.5,18
29.9,15.0
这个样是看不出什么有价值的信息。你需要画出一个图表来进行判断。如果是在胡克那个时代,只能用手画出图表。现在只需用Python就可以了。我把 HookeLaw.csv 文件放到了 nginx 服务器上,方便 Python 读取。
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
# 从CSV文件中读取数据,并返回2个数组。分别是自变量x和因变量y。方便TF计算模型。
def zc_read_csv():
zc_dataframe = pd.read_csv("http://yoursize.com/HookeLaw.csv", sep=",")
x = []
y = []
for zc_index in zc_dataframe.index:
zc_row = zc_dataframe.loc[zc_index]
x.append(zc_row["force"])
y.append(zc_row["length_variation"])
return (x,y)
x, y = zc_read_csv()
# 获得画图对象。
fig = plt.figure()
fig.set_size_inches(10, 4) # 整个绘图区域的宽度10和高度4
ax = fig.add_subplot(1, 2, 1) # 整个绘图区分成一行两列,当前图是第一个。
# 画出原始数据的散点图。
ax.set_title("Hooke's Law")
ax.set_xlabel("force")
ax.set_ylabel("length_variation")
ax.scatter(x, y)
plt.show()
程序运行结果:
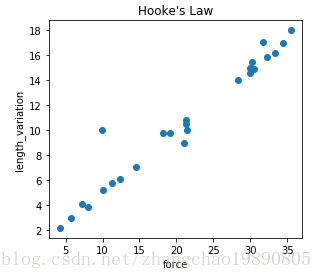
排除掉明显的误差数据,散点图看上去是一条直线。设弹簧长度增量是 y,受力是x,有理由推测 y = kx + b。在没有计算机的时代,需要手动画一条直线,并保持直线和各个点之间的距离最小,最后计算直线的 k 和 b。
因为有了计算机,我们可以用计算机来完成这些繁琐的工作。利用线性回归,让程序一点一点找到合适的b值和k值。在机器学习里面b和k叫做权重,用 w
0
和 w
1
表示。公式可以写成 y = w
0
+ w
1
x 。
下面的程序中,zc_x4tf 相当于是一个矩阵,在TF会话中是input:
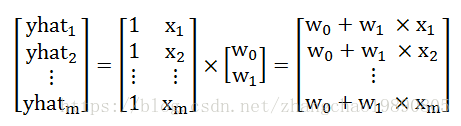
zc_y4tf 相当于是一个列向量,在TF会话中是weights:

yhat = tf.matmul(input, weights) 可以理解成矩阵乘法,结果是预测值。
L2损失用于衡量每个实际值和预测值之间的偏差。对应概率论中的方差。
下面的程序给出了一个完整的实现。
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
# 从CSV文件中读取数据,并返回2个数组。分别是自变量x和因变量y。方便TF计算模型。
def zc_read_csv():
zc_dataframe = pd.read_csv("http://yoursize.com/HookeLaw.csv", sep=",")
x = []
y = []
for zc_index in zc_dataframe.index:
zc_row = zc_dataframe.loc[zc_index]
x.append(zc_row["force"])
y.append(zc_row["length_variation"])
return (x,y)
x, y = zc_read_csv()
zc_x = []
for item in x:
zc_x.append([1., item])
zc_x4tf = np.array(zc_x).astype(np.float32)
zc_y = []
for item in y:
zc_y.append([item])
zc_y4tf = np.array(zc_y).astype(np.float32)
# 存放 L2 损失的数组
loss_arr = []
# 训练的步数。即训练的迭代次数。
training_steps = 55
# 在梯度下降算法中,控制梯度步长的大小。
learning_rate = 0.01
# 开启TF会话,在TF 会话的上下文中进行 TF 的操作。
with tf.Session() as sess:
# 设置 tf 张量(tensor)。注意:TF会话中的注释里面提到的常量和变量是针对TF设置而言,不是python语法。
# 因为在TF运算过程中,x作为特征值,y作为标签
# 是不会改变的,所以分别设置成input 和 target 两个常量。
# 这是 x 取值的张量。设一共有m条数据,可以把input理解成是一个m行2列的矩阵。矩阵第一列都是1,第二列是x取值。
input = tf.constant(zc_x4tf)
# 设置 y 取值的张量。target可以被理解成是一个m行1列的矩阵。 有些文章称target为标签。
target = tf.constant(zc_y4tf)
# 设置权重变量。因为在每次训练中,都要改变权重,来寻找L2损失最小的权重,所以权重是变量。
# 可以把权重理解成一个2行1列的矩阵。初始值是随机的。[2,1] 表示2行1列。
weights = tf.Variable(tf.random_normal([2, 1], 0, 0.1))
# 初始化上面所有的 TF 常量和变量。
tf.global_variables_initializer().run()
# input 作为特征值和权重做矩阵乘法。m行2列矩阵乘以2行1列矩阵,得到m行1列矩阵。
# yhat是新矩阵,yhat中的每个数 yhat' = w0 * 1 + w1 * x。
# yhat是预测值,随着每次TF调整权重,yhat都会变化。
yhat = tf.matmul(input, weights)
# tf.subtract计算两个张量相减,当然两个张量必须形状一样。 即 yhat - target。
yerror = tf.subtract(yhat, target)
# 计算L2损失,也就是方差。
loss = tf.nn.l2_loss(yerror)
# 梯度下降算法。
zc_optimizer = tf.train.GradientDescentOptimizer(learning_rate)
# 注意:为了安全起见,我们还会通过 clip_gradients_by_norm 将梯度裁剪应用到我们的优化器。
# 梯度裁剪可确保梯度大小在训练期间不会变得过大,梯度过大会导致梯度下降法失败。
zc_optimizer = tf.contrib.estimator.clip_gradients_by_norm(zc_optimizer, 5.0)
zc_optimizer = zc_optimizer.minimize(loss)
for _ in range(training_steps):
# 重复执行梯度下降算法,更新权重数值,找到最合适的权重数值。
sess.run(zc_optimizer)
# print(weights.eval())
# 每次循环都记录下损失loss的值,病放到数组loss_arr中。
loss_arr.append(loss.eval())
zc_weight_arr = weights.eval()
zc_yhat = yhat.eval()
print("weights", zc_weight_arr)
# 画出原始数据的散点图和数学模型的直线图。
def paint_module(fig):
ax = fig.add_subplot(1, 2, 1) # 整个绘图区分成一行两列,当前图是第一个。
# 画出原始数据的散点图。
ax.set_title("Hooke's Law")
ax.set_xlabel("force")
ax.set_ylabel("length_variation")
ax.scatter(x, y)
# 画出预测值的散点图。
p_yhat = [a[0] for a in zc_yhat]
ax.scatter(x, p_yhat, c="red", alpha=.6)
# 画出线性回归计算出的直线模型。
line_x_arr = [1, 40]
line_y_arr = []
for item in line_x_arr:
line_y_arr.append(zc_weight_arr[0] + zc_weight_arr[1] * item)
ax.plot(line_x_arr, line_y_arr, "g", alpha=0.6)
# 画出训练过程中的损失变化
def paint_loss(fig):
print("loss", loss_arr)
ax = fig.add_subplot(1, 2, 2) # 整个绘图区分成一行两列,当前图是第二个。
ax.plot(range(0, training_steps), loss_arr)
# 获得画图对象。
fig = plt.figure()
fig.set_size_inches(10, 4) # 整个绘图区域的宽度10和高度4
paint_module(fig)
paint_loss(fig)
plt.show()
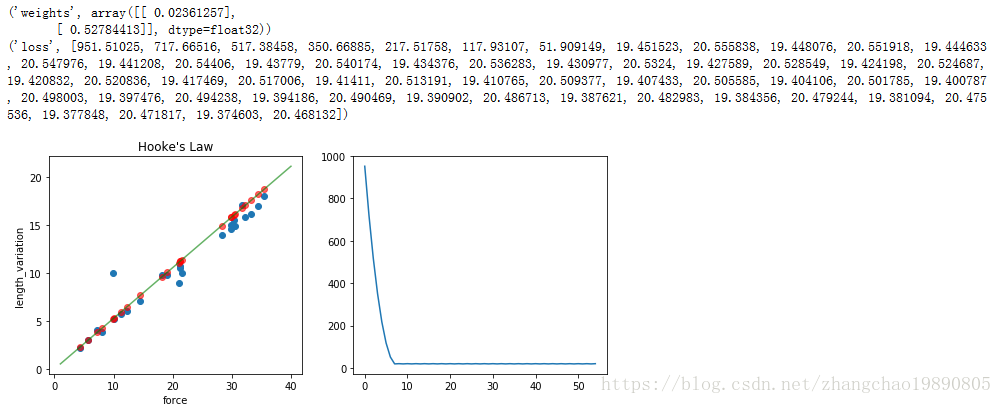
有结果可知 y = 0.5x + 0.2 变形得 x = 2y – 0.4
而胡克定律公式是 F = kL (F是力,k是弹性系数,L是弹簧长度增量)。可以把常数项 -0.4 看作系统误差,则弹簧弹性系数是2 。