参考原文:
图像分类、目标检测、语义分割、实例分割和全景分割的区别_AI视觉网奇的博客-CSDN博客
1.图像分类
(Object Classification):识别图片中存在的不同物体的种类(下方左图,人类、羊类、狗类)
常用算法:KNN、SVM、BP 神经网络、CNN 和迁移学习
常用数据集:ImageNet、MNIST、Caltech 101
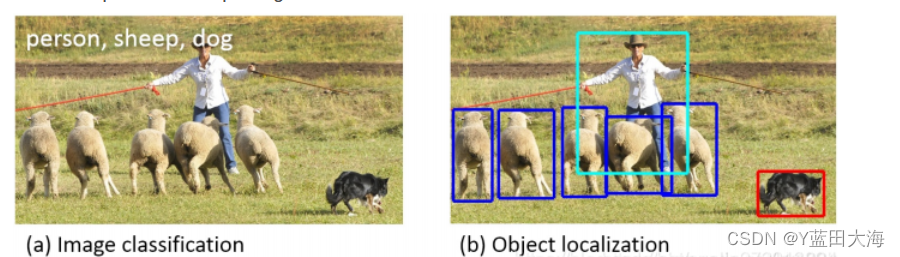
2.目标检测
(Object Detection):识别图片中的物体及其位置,把它们用矩形框框起来(上方右图,识别三类并用框框起来)
目前常用的目标检测算法有
R-CNN
(速度慢,过程繁琐,训练所需空间大)、
Faster R-CNN
(比前者更准确、快速、简便,但还是不够快,不够简洁)和基于
YOLO
的目标检测的算法(速度快,泛化能力强,但精度低,小目标和邻近目标检测效果差,比Fast R-CNN定位误差大一些)
常用数据集:PASCAL VOL、MS COCO、ImageNet
3.语义分割
(semantic segmentation):就是需要区分到图中每一点像素点,而不仅仅是矩形框框住了(用颜色区分)。但是同一物体的不同实例不需要单独分割出来。(是精细化识别、图像理解的可靠方式,但费人力物力)语义分割只能判断类别,无法区分个体。(下图c,用不同颜色区分不同类,相同类中的个体不用区分成羊12345)

常见算法:
FCN、U-net、SegNet
常见数据集:PASCAL VOL、MS COCO、CItyscapes
4.实例分割
(Instance segmentation):其实就是
目标检测
和
语义分割
的结合。相对目标检测的边界框,实例分割可精确到物体的边缘;相对语义分割,实例分割需要标注出图上同一物体的不同个体(羊1,羊2,羊3)(和语义分割相似,不过相同的类中用不同的颜色区分成羊12345)
目前常用的实例分割算法是Mask R-CNN、Fast-CNN、DeepMask
常见数据集:PASCAL VOL、MS COCO、CItyscapes
5.全景分割
(panoptic segmentation):
语义分割
和
实例分割
的结合,即要对所有目标都检测出来,又要区分出同个类别中的不同实例。实例分割只对图像中的
目标
)进行检测和按像素分割,区分不同实例(使用不同颜色),而全景分割是对图中的
所有物体包括背景
(全景)都要进行检测和分割,区分不同实例(使用不同颜色)

目前常用算法:Mask R-CNN、DeeperLab、Baseline、UPSNet
常见数据集:
Cityscapes、ADE20k、Mapillary Vistas、COCO
6.图像增强:
算法对原有的图像进行修饰和加工,提供更好的视觉效果(例如照片拍摄时光线不足,便可以使用图像增强来改善图片质量)
详细内容请看:
《图像增强算法综述》、 《图像增强》知识点_Y蓝田大海的博客-CSDN博客
目前常用的实例分割算法:直方图均衡化、对数图像增强算法、指数图像增强算法
7.行为识别
8.图像识别