首先肯定要标定了,下面是标定结果,直接把参数写成一个数组,后面算子直接调用
*下面是标定结果,直接生成内外参矩阵
* Calibration 01: Code generated by Calibration 01
CameraParameters := ['area_scan_division',0.0260747,-96.9022,2.40016e-006,2.4e-006,2580.78,1799.58,5472,3648]
CameraPose := [-0.0232082,-0.011688,0.51574,1.3039,358.374,180.642,0]下面是核心的代码,image_points_to_world_plan用内参和外参把像素坐标转为世界坐标,然后显示出来
dev_set_color ('green')
dev_get_window(WindowHandle)
set_display_font(WindowHandle,16,'mono','true','false')
color :=[255,0,255]
*dev_display (TransContours)
image_points_to_world_plane (CameraParameters, CameraPose, Row, Column, 'mm', X, Y)
disp_message(WindowHandle,['center point:'+'('+X$'5.2f'+','+Y$'5.2f'+')'+'mm'],'window',12,120,'red',['green','false'])参考坐标系:
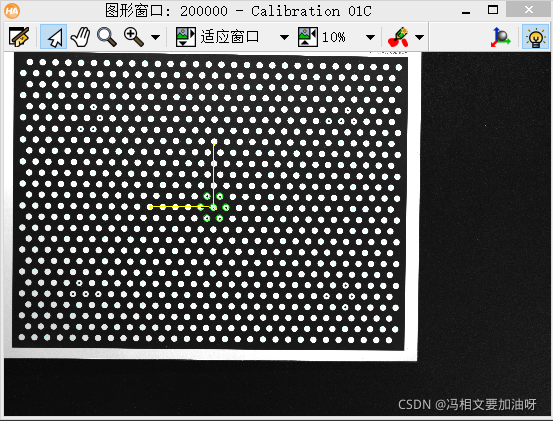
结果:

版权声明:本文为weixin_51229250原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。