一、题目各个坐标系的含义
背景:
本文以 gmapping 为例,其中 map、odom、base_link、laser 均来自 gmapping 中的坐标系。这里的 gmapping 是指使用
laser_scan_matcher
包,在仅使用激光雷达、无需里程计的情况下跑 gmapping。
下图是执行
rosrun rqt_tf_tree rqt_tf_tree
的结果:
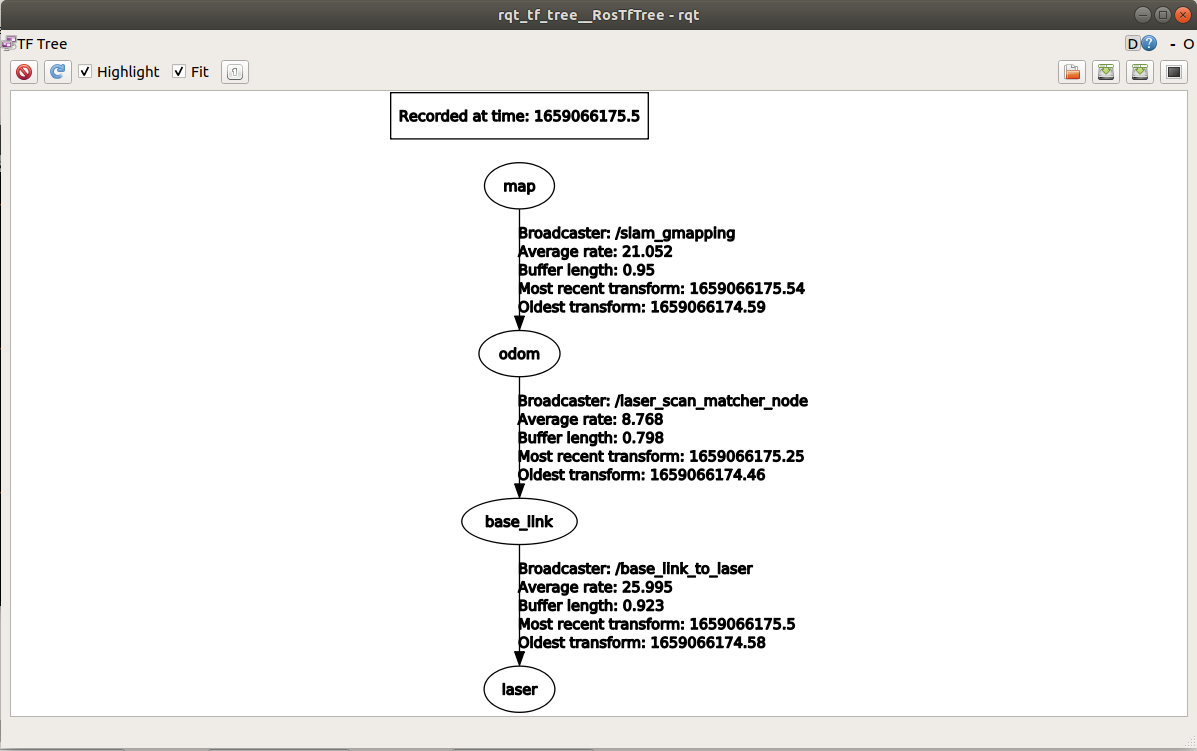
- map:可以理解为世界坐标系
- odom:机器人以为的世界坐标系
- base_link:机器人本体坐标系
- laser:激光雷达坐标系
二、对坐标系的理解
- map:地图坐标系,顾名思义,一般设该坐标系为固定坐标系(fixed frame,rviz中的设置项),一般与机器人所在的世界坐标系一致。
- base_link:机器人本体坐标系,与机器人中心重合,原点一般为机器人的旋转中心。当然有些机器人(PR 2)是 base_footprint,其实意思差不多,base_footprint 坐标系原点为 base_link 原点在地面的投影,有些许区别(z值不同)。
- odom:里程计坐标系,这里要区分开odom topic,这是两个概念,一个是坐标系(本文),一个是根据编码器或者视觉等计算的里程计。但是两者也有关系,odom topic 转化的位姿矩阵是odom–>base_link的tf关系。这时可能会有疑问,odom 和 map 坐标系是不是重合的?可以很肯定地说,机器人起始运动位置这两者是重合的。但是,随着时间的推移是不重合的,而出现的偏差就是里程计的累积误差。那 map–>odom 的 tf 怎么得到?就是在一些校正传感器合作校正的 package 比如 amcl 会给出一个位置估计(localization),这可以得到 map–>base_link 的 tf,所以估计位置和里程计位置的偏差也就是 odom 与 map 的坐标系偏差。所以,如果你的 odom 计算没有错误,那么 map–>odom 的 tf 就是 0。
- laser:激光雷达的坐标系,与激光雷达的安装点有关,其与 base_link 的 tf 为固定的。
三、对于 map –> odom 举个例子
- 首先,我们制定机器人路径时,使用的必然是绝对坐标系。要完成这件事,机器人需要先知道自己在哪。它没有GPS,所以只能倒推——通过里程计。这也是为什么“没有偏移的话 odam 应该与 map 重合”,因为 odam 本来就是用来倒推 map 的。
-
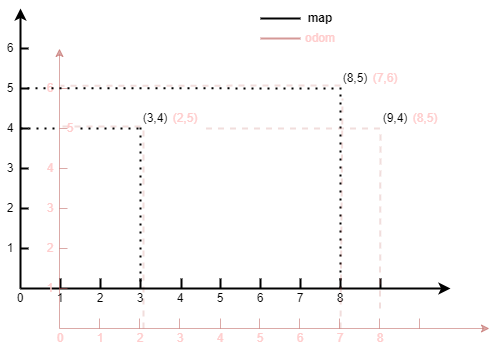
假设机器人终点定在了
(8,5)
,初始时刻,map 的
(8,5)
和 odom 的
(8,5)
是重合的。 -
odom
坐标系视角看运动过程:假设里程计告诉它,自原点启动起,它在 X 方向移动
2
,Y 方向移动
5
,运动描述为
(+2,+5)
。于是它就认为自己在 odom 坐标系下的
(2,5)
。反馈给 base_link,则 base_link 坐标系下,机器人需要运动
(8,5)
–
(2,5)
=
(+6,+0)
才能到达目标点
(8,5)
。而此时如果机器人按
(+6,+0)
运动完后,确实能到达odom下的终点
(8,5)
,并开始以完成任务为由而沾沾自喜,殊不知,它并没有运动到真正的终点终点:map 坐标系下的
(8,5)
。 -
map
坐标系看运动过程:然而实际上,因为里程计累计误差,它其实第一次运动到了
(3,4)
。但在 odom 中它在
(2,5)
。它理应运动
(8,5)
–
(3,4)
=
(+5,+1)
到达目标点,但它会运动
(+6,+0)
,因为 odam 反馈给 base_link 后,目标在 base_link 坐标系下的(6,0)。其实到达的是 map 坐标系下的
(9,4)
,并不能达到运动到 map 坐标系下目标点
(8,5)
的目的。机器人只能自以为是地认为自己运动到了odom 坐标系下的
(8,5)
就算万事大吉了。 -
而这时,校正传感器又告诉它了,“我觉得你的里程计刚才 X 漏算了 0.999,Y 多算了 1.001”。
于是它把自己所在位置修正为了(2 + 0.999,5 – 1.001)=(2.999,3.999),接下来该移动(8,5)-(2.999,3.999)=(+5.001,+1.001)。就能将偏差校正回来,到达 map 坐标系下的终点
(8,5)
了。
过程总结:
四、tf 树是怎么回事
布拉布拉
版权声明:本文为weixin_42915934原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。