实现上一篇
学习笔记
里面的想法。
首先总结lida_localization里面test_frame_work的整体工作。
1.订阅了三个传感器数据。其中cloud_data提供当前帧的点云,gnss提供t向量,imu提供R矩阵,然后由t和R的数据整合生成transform的4×4矩阵。
2.将订阅到的点云转换为PCL格式,然后使用PCL库函数处理,其中主要是使用transform矩阵进行位置变换,然后在将点云转换为ROS格式,然后再发布出去。
3.利用前面得到的transform矩阵,发布odometry。
主要是这个流程,现在有之前跟这李太白大佬学习二维slam建图的数据lesson1.bag。看了一下包的数据格式:
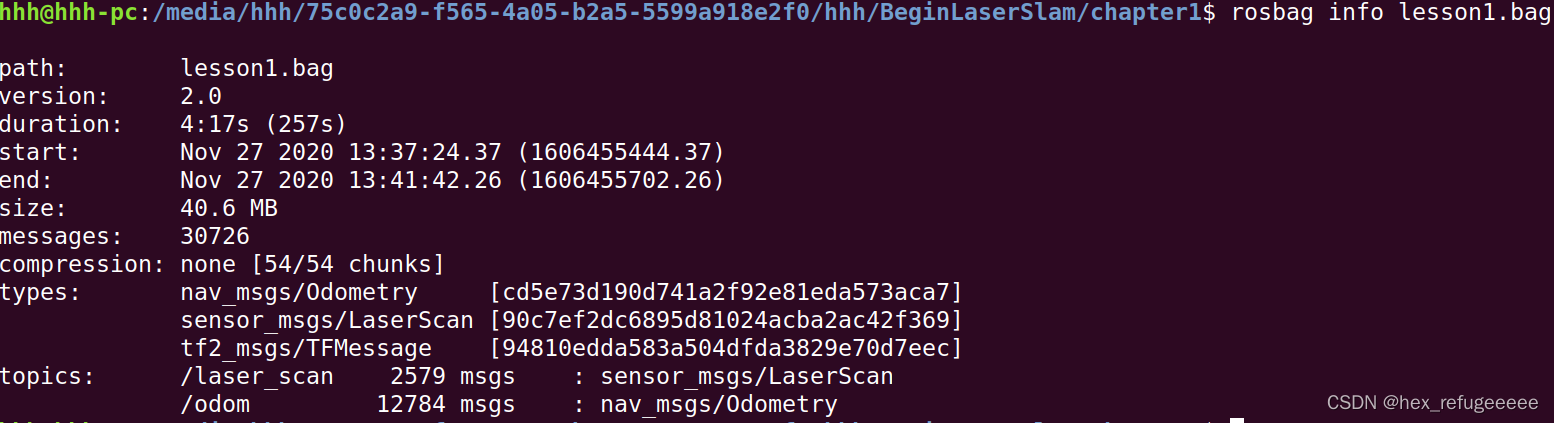
发布的话题有/laser_scan和/odom所有想着实现和上面一样的效果,每一帧点云都在转换在里程计上面。
具体流程:
1.订阅/laser_scan,并将这个转换为PCL格式。
2.订阅/odom,并获得transform。
3.利用PCL库函数将PCL格式的点云带上transform变换,然后转换回ROS格式并发布,再发布odom。
首先要创建工作空间,确定相关的依赖。
mkdir -p node1/src
cd node1/src
catkin_init_workspace再确定相关的依赖,直接看lida_localization里面package.xml文件内容:
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<depend>sensor_msgs</depend>
<depend>pcl_ros</depend>
<depend>std_msgs</depend>
<depend>geometry_msgs</depend>
<depend>tf</depend>
<depend>eigen_conversions</depend>依赖包有roscpp、rospy、sensor_msgs、pcl_ros、std_msgs、geometry_msgs、tf、eigen_conversions、nav_msgs。直接照抄就可以了。
一、设置PCL点云数据格式
这里直接参考lidar_localization里面cloud的数据格式。
cloud_data.hpp
#ifndef FRAME_EXERCISE_SENSOR_DATA_CLOUD_DATA_HPP_
#define FRAME_EXERCISE_SENSOR_DATA_CLOUD_DATA_HPP_
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
namespace frame_exercise
{
class CloudData
{
public:
using POINT = pcl::PointXYZ;
using CLOUD = pcl::PointCloud<POINT>;
using CLOUD_PTR = CLOUD::Ptr;
public:
CloudData()
:cloud_ptr(new CLOUD()) {
}
public:
double time = 0.0;
CLOUD_PTR cloud_ptr;
};
}注意这里同时也要设置好cmake文件里面关于pcl的设置
find_package(PCL 1.7 REQUIRED)
list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4")
include_directories(${PCL_INCLUDE_DIRS})
list(APPEND ALL_TARGET_LIBRARIES ${PCL_LIBRARIES})
二、订阅bag包发送的/laser_scan
和lidar_localization里面的处理方式一样,写单独的类,并用构造函数来订阅topic。
这里有一点点需要变换,在lidar_localization里面
它订阅的是
sensor_msgs::PointCloud2::ConstPtr
数据类型,
而这里订阅的是
sensor_msgs/LaserScan
数据类型。所以需要修改。
cloud_subscriber.hpp
#ifndef FRAME_EXERCISE_SUBSCRIBER_CLOUD_SUBSCRIBER_HPP_
#define FRAME_EXERCISE_SUBSCRIBER_CLOUD_SUBSCRIBER_HPP_
#include <deque>
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include "frame_exercise/sensor_data/cloud_data.hpp"
namespace frame_exercise
{
class CloudSubscriber {
public:
CloudSubscriber(ros::NodeHandle& nh, std::string topic_name, size_t buff_size);
CloudSubscriber() = default;
void ParseData(std::deque<CloudData>& deque_cloud_data);
private:
void msg_callback(const sensor_msgs::LaserScan::ConstPtr& cloud_msg_ptr);
private:
ros::NodeHandle nh_;
ros::Subscriber subscriber_;
std::deque<CloudData> new_cloud_data_;
};
} // namespace frame_exercise
将格式改变后,突然发现不能借助pcl库的函数进行转换了,得自己来写。。。
这里参靠李太白大佬的
文章
,来写将laserscan转化为pointcloud2格式。
比较简单,将参数格式一改,查询一下相关的rosmsg show就好了
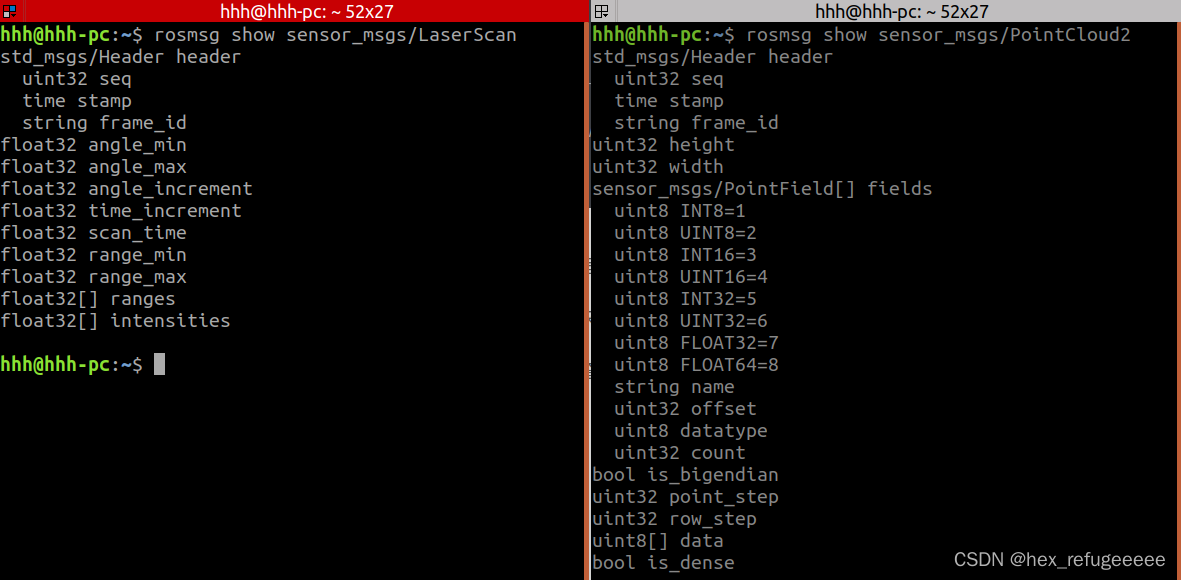
将LaserScan的格式转换为PointCloud2的格式。
cloud_subscriber.cpp:
#include "frame_exercise/subscriber/cloud_subscriber.hpp"
namespace frame_exercise
{
CloudSubscriber::CloudSubscriber(ros::NodeHandle& nh, std::string topic_name, size_t buff_size)
:nh_(nh) {
subscriber_ = nh_.subscribe(topic_name, buff_size, &CloudSubscriber::msg_callback, this);
}
void CloudSubscriber::msg_callback(const sensor_msgs::LaserScan::ConstPtr& scan_msg) {
CloudData cloud_data;
cloud_data->cloud_ptr->points.resize(scan_msg->ranges.size());
cloud_data.time = scan_msg->header.stamp.toSec();
// pcl::fromROSMsg(*cloud_msg_ptr, *(cloud_data.cloud_ptr));
// 这里不能使用这个函数,得自己手写数据转换方式
for(unsigned int i = 0; i < scan_msg->ranges.size(); ++i )
{
pcl::PointXYZ & point_tmp = cloud_data->cloud_ptr->points[i];
float range = scan_msg->ranges[i];
if (!std::isfinite(range))
{
// std::cout << " " << i << " " << scan_msg->ranges[i];
point_tmp = invalid_point_;
continue;
}
if (range > scan_msg->range_min && range < scan_msg->range_max)
{
// 获取第i个点对应的角度
float angle = scan_msg->angle_min + i * scan_msg->angle_increment;
// 获取第i个点在笛卡尔坐标系下的坐标
point_tmp.x = range * cos(angle);
point_tmp.y = range * sin(angle);
point_tmp.z = 0.0;
}
else
{
// 无效点
point_tmp = invalid_point_;
}
cloud_data->cloud_ptr->width = scan_msg->ranges.size();
cloud_data->cloud_ptr->height = 1;
cloud_data->cloud_ptr->is_dense = false; // contains nans
cloud_data->cloud_ptr->header.seq = scan_msg->header->seq;
cloud_data->cloud_ptr->header.frame_id = scan_msg->header->frame_id;
}
new_cloud_data_.push_back(cloud_data);
}
void CloudSubscriber::ParseData(std::deque<CloudData>& cloud_data_buff) {
if (new_cloud_data_.size() > 0) {
cloud_data_buff.insert(cloud_data_buff.end(), new_cloud_data_.begin(), new_cloud_data_.end());
new_cloud_data_.clear();
}
}
} // namespace frame_exercise
三、订阅bag包发送的/odom
查看Odometry的数据格式
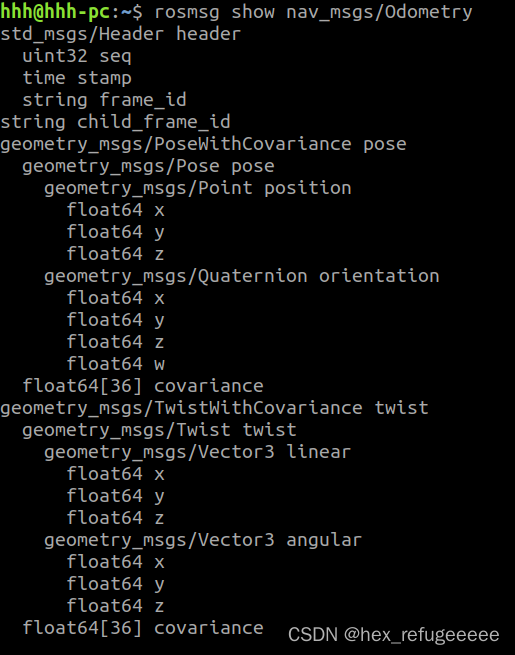
思考:在订阅odometry的时候要不要也像cloud_subscriber一样添加一个专门的clouddata的格式,应该不用,我只需要提取每一帧的odom中的transform就行了,不需要对他进行专门的数据处理。
主要用到了四元数与旋转矩阵之间的转换,这篇
文章
写的很好,参考这篇文章提到的函数。
odom_subscriber.hpp
#ifndef FRAME_EXERCISE_SUBSCRIBER_CLOUD_SUBSCRIBER_HPP_
#define FRAME_EXERCISE_SUBSCRIBER_CLOUD_SUBSCRIBER_HPP_
// 订阅到odom得到transform矩阵。
#include <deque>
#include <ros/ros.h>
#include <nav_msgs/Odometry.h>
#include <Eigen/Dense>
namespace frame_exercise
{
class OdomSubscriber{
public:
OdomSubscriber(ros::NodeHandle& nh_, std::string topic_name, std::size_t buff_size);
std::deque<Eigen::Matrix4f> odom_transform;
private:
void msg_callback(const nav_msgs::Odometry::ConstPtr& odom_msg);
private:
ros::NodeHandle nh_;
ros::Subscriber subscriber_;
};
} // namespace frame_exercise
特地写了一个用于存放odomtransform的队列。
OdomSubscriber.cpp
#include "frame_exercise/subscriber/odom_subscriber.hpp"
namespace frame_exercise
{
OdomSubscriber::OdomSubscriber(ros::NodeHandle& nh, std::string topic_name, size_t buff_size):
nh_(nh){
subscriber_ = nh_.subscriber(topic_name, buff_size, &OdomSubscriber::msg_callback, this);
}
void OdomSubscriber::msg_callback(const nav_msgs::Odometry::ConstPtr& odom_msg)
{
Eigen::Maxtrix4f transform;
// t向量
transform(0, 3) = odom_msg.pose.pose.position.x;
transform(1, 3) = odom_msg.pose.pose.position.y;
transform(2, 3) = odom_msg.pose.pose.position.z;
// R旋转矩阵
Eigen::Quaternionf q;
q.x() = odom_msg.pose.pose.orientation.x;
q.y() = odom_msg.pose.pose.orientation.y;
q.z() = odom_msg.pose.pose.orientation.z;
transform.block<3,3>(0,0) = q.matrix();
odom_transfrom.push_back(transform);
}
} // namespace frame_exercise
感觉应该没一个函数都要测试一下能不能正常使用,达到我想要的效果,不能这样一股闹的全部写完再测试。
四、发布环节
主要应用到函数:
pcl::transformPointCloud(*cloud_data.cloud_ptr, *cloud_data.cloud_ptr, odometry_matrix);现在的问题是odometry_matrix这个已经存在了,但不知道怎么提取出来。
还是采用了lidar_localization的框架,在里面单独使用一个队列,然后在callback函数里面处理这个队列。
里面遇到了很多坑,都是我对于pcl没有特别理解的后果。。。
a.回调函数里面关于引用的处理要带上*。
b.关于头文件相互包含的问题。(这个错误卡了我一个下午,最后发现是宏定义出了问题,我当时直接复制了cloud_subscriber.hpp的宏定义!!!)
直接将发布环节写在frame_exercise.cpp里面了:
#include "ros/ros.h"
#include "pcl/common/transforms.h"
#include <pcl_ros/point_cloud.h>
#include <sensor_msgs/PointCloud2.h>
#include <nav_msgs/Odometry.h>
#include "frame_exercise/subscriber/cloud_subscriber.hpp"
#include "frame_exercise/subscriber/odom_subscriber.hpp"
using namespace frame_exercise;
int main(int argc, char** argv)
{
ros::init(argc, argv, "test_frame");
ros::NodeHandle nh;
ros::Publisher pub_odom;
ros::Publisher pub_cloud;
// pub_odom = nh.advertise<nav_msgs::Odometry>("/odom1", 10);
pub_cloud = nh.advertise<sensor_msgs::PointCloud2>("/cloud1", 10);
std::shared_ptr<CloudSubscriber> cloud_sub_ptr = std::make_shared<CloudSubscriber>(nh, "/laser_scan", 1000);
std::shared_ptr<OdomSubscriber> odom_sub_ptr = std::make_shared<OdomSubscriber>(nh, "/odom", 1000);
std::deque<CloudData> cloud_data_buff;
std::deque<Eigen::Matrix4f> transform_buff;
ros::Rate rate(100);
while(ros::ok())
{
ros::spinOnce();
cloud_sub_ptr->ParseData(cloud_data_buff);
odom_sub_ptr->ParseData(transform_buff);
while(cloud_data_buff.size() > 0 && transform_buff.size())
{
CloudData cloud_data = cloud_data_buff.front();
Eigen::Matrix4f odometry_matrix = transform_buff.front();
cloud_data_buff.pop_front();
transform_buff.pop_front();
pcl::transformPointCloud(*cloud_data.cloud_ptr, *cloud_data.cloud_ptr, odometry_matrix);
// 如果想要发布odom的话,还需要定义一个nav_msgs::Odometry对象,太复杂了,先不写了。
pub_cloud.publish(cloud_data.cloud_ptr);
}
rate.sleep();
}
return 0;
}
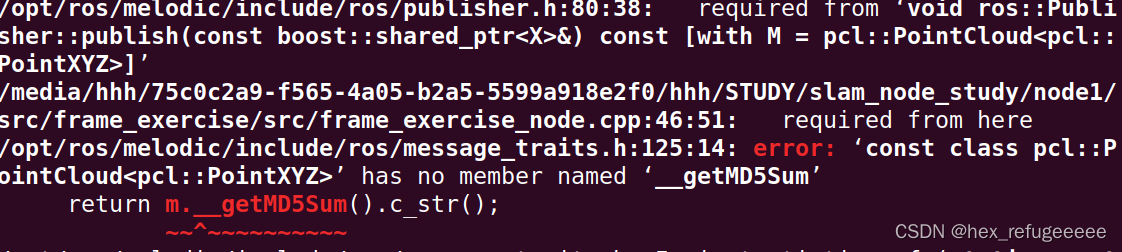
最开始编译的时候 会报这个错误,想了很久也不知道是哪里的问题,最后是看了这篇
文章
解决。
然后就可以成功编译。
但显示明明生成了可执行文件,但还是rosrun的时候报错说没有。
我在devel的lib中没有发现,但在build里面的frame_exercise文件里面找到了。导致rosrun的时候找不到可执行文件,解决这个问题主要看了这篇
文章
。
然后发现了很多bug,暂时解决不了。先列举一下发现的bug:
1.四元数是有w的。
2.发布需要变成rosmsg格式的,要改进。
3.pcl::transformPointCloud(*cloud_data.cloud_ptr, *cloud_data.cloud_ptr, odometry_matrix);运行到这里就会报错,不知道是哪里的问题。
先挖个坑,以后在解决这些问题。
实践出真知