下图是三连杆机械臂,也就是常说的拟人臂。
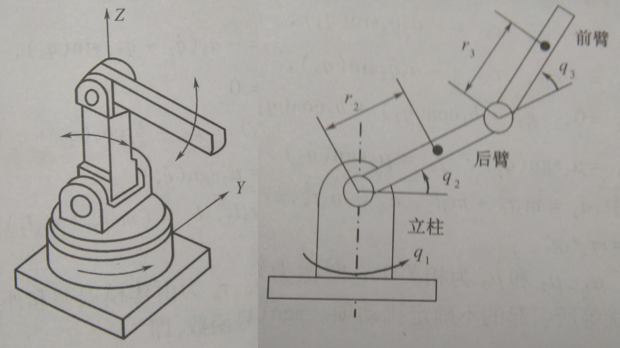
采用拉格朗日方法并做适当简化后得到其动力学模型:
H
(
q
)
q
¨
+
C
(
q
,
q
˙
)
q
˙
+
G
(
q
)
+
F
(
q
˙
)
+
τ
d
=
τ
其中:
F
(
q
˙
)
为静态和动态摩擦矩阵,
τ
d
为建模误差和外界干扰等引起的不确定项
h
11
h
22
h
23
h
33
h
12
=
I
1
+
a
1
c
o
s
2
(
q
2
)
+
a
2
2
c
o
s
(
q
2
+
q
3
)
+
1
a
3
c
o
s
(
q
2
)
c
o
s
(
q
2
+
q
3
)
=
I
2
+
a
1
+
a
2
+
2
a
3
c
o
s
(
q
3
)
=
h
32
=
a
2
+
a
3
c
o
s
(
q
3
)
=
I
3
+
a
2
=
h
13
=
h
21
=
h
31
=
0
c
11
c
12
c
13
c
22
c
23
c
32
c
21
c
31
c
33
=
−
1
2
a
1
q
˙
2
s
i
n
(
2
q
2
)
−
1
2
a
2
(
q
˙
2
+
q
˙
3
)
s
i
n
(
2
q
2
+
2
q
3
)
−
a
3
q
˙
2
s
i
n
(
2
q
2
+
q
3
)
−
a
3
q
˙
3
c
o
s
(
2
q
2
)
s
i
n
(
q
2
+
q
3
)
=
−
1
2
a
1
q
˙
1
s
i
n
(
2
q
2
)
−
1
2
a
2
q
˙
1
s
i
n
(
2
q
2
+
q
3
)
−
a
3
q
˙
1
s
i
n
(
2
q
2
+
q
3
)
=
−
1
2
a
1
q
˙
1
s
i
n
(
2
q
2
+
q
3
)
−
a
3
q
˙
1
c
o
s
(
2
q
2
)
s
i
n
(
q
2
+
q
3
)
=
−
a
3
q
˙
3
s
i
n
(
q
3
)
=
−
a
3
(
q
˙
2
+
q
˙
3
)
s
i
n
(
q
3
)
=
−
a
3
q
˙
2
s
i
n
(
q
3
)
=
−
c
12
=
−
c
13
=
0
g
1
g
2
g
3
=
0
=
b
1
c
o
s
(
q
2
)
+
b
2
c
o
s
(
q
2
+
q
3
)
=
b
2
c
o
s
(
q
2
+
q
3
)
f
1
f
2
f
3
=
μ
1
s
g
n
(
q
˙
1
)
=
μ
2
s
g
n
(
q
˙
2
)
=
μ
3
s
g
n
(
q
˙
3
)
其中:
m
i
表示连杆的质量,
l
i
表示连杆的长度,
r
i
表示连杆质心的长度,
I
i
表示连杆关于其转动轴的转动惯量。
g
表示重力加速度矢量,
q
i
表示连杆的转动角度(转动关节的关节变量)。
a
1
b
1
=
m
2
r
2
2
+
m
3
l
2
2
=
(
m
2
r
2
+
m
3
r
l
2
)
g
a
2
b
2
=
m
3
r
2
3
=
m
3
r
3
g
a
3
=
m
3
r
3
l
2
μ
i
为相关库伦摩擦系数,
s
g
n
(
)
为符号函数
摘自:
胡盛斌,非线性多关节机器人系统滑膜控制,国防工业出版社,2015.03