一. DS18B20大概介绍
1. Power
电源可以用 parasite power 或者
external power
,普遍选择外部电源
2. DS18B20内部存储一共有9个字节
(1).DS18B20内部存储框图
读取温度只需要用byte0,byte1

(2).DS18B20 温度有四种分辨率模式(9,10,11,
12bit
)
12bit
采用12bit分辨率,高5位(S)是判断温度正负(0为正,1为负)
下面两图分别为温度高低字节,温度与读取数据之间的关联

3.DS18B20采用单总线协议
-
All data and commands are transmitted
least significant bit first(读写都是从最低位开始)
over the 1-Wire bus. - 1-wire : 异步半双工串行通信
4.DS18B20发送命令顺序
(1).
TRANSACTION SEQUENCE
The transaction sequence for accessing the DS18B20 is as follows:
三个顺序必须遵行
(初始化 – ROM命令 – DS18B20命令)
-
Step 1. Initialization
-
Step 2. ROM Command (followed by any required data exchange)
-
Step 3. DS18B20 Function Command (followed by any required data exchange)
It is very important to follow this sequence every time the DS18B20 is accessed, as the DS18B20 will not respond if any steps in the sequence are missing or out of order. Exceptions to this rule are the Search ROM [F0h] and Alarm Search [ECh] commands. After issuing either of these ROM commands, the master must return to Step 1 in the sequence.
(2).ROM,DS18B20命令流程图
读取温度需要的命令:
SKIP ROM [CCh]
(跳过ROM命令),
CONVERT T [44h]
(温度转换命令),
READ SCRATCHPAD [BEh]
(温度读取命令)

DS18B20 函数命令流程表

二. DS1820 INITIAL(初始化)
INITIALIZATION PROCEDURE:
RESET AND PRESENCE PULSES
(复位脉冲和存在脉冲)
All communication with the DS18B20 begins with an initialization sequence that consists of a reset pulse from the master followed by a presence pulse from the DS18B20. This is illustrated in Figure 13. When the DS18B20 sends the presence pulse in response to the reset, it is indicating to the master that it is on the bus and ready to operate.
During the initialization sequence the bus master transmits (TX) the reset pulse by pulling the 1-Wire bus low for a minimum of 480us. The bus master then releases the bus and goes into receive mode (RX). When the bus is released, the 5k pullup resistor pulls the 1-Wire bus high. When the DS18B20 detects this rising edge, it waits 15us to 60us and then transmits a presence pulse by pulling the 1-Wire bus low for 60us to 240us
1.初始化过程
- 复位脉冲:控制总线拉低480us以上,然后释放总线
- WAIT:15~60us
- 检测存在脉冲:在60~240us内总线有一个低电平
- wait:1000us-复位脉冲-WAIT-检测存在脉冲
- 初始化完成.
2.初始化时序图

三.向DS18B20 写命令
WRITE TIME SLOTS
There are two types of write time slots: “Write 1” time slots and “Write 0” time slots. The bus master uses a Write 1 time slot to write a logic 1 to the DS18B20 and a Write 0 time slot to write a logic 0 to the DS18B20. All write time slots must be a minimum of 60us in duration with a minimum of a 1 s recovery time between individual write slots. Both types of write time slots are initiated by the master pulling the 1-Wire bus low (see Figure 14). To generate a Write 1 time slot, after pulling the 1-Wire bus low, the bus master must release the 1-Wire bus within 15us. When the bus is released, the 5k pullup resistor will pull the bus high.
To generate a Write 0 time slot, after pulling the 1-Wire bus low, the bus master must continue to hold the bus low for the duration of the time slot (at least 60us). The DS18B20 samples the 1-Wire bus during a window that lasts from 15us to 60us after the master initiates the write time slot. If the bus is high during the sampling window, a 1 is written to the DS18B20. If the line is low, a 0 is written to the DS18B20.
1.写时序图

2.写过程
1.写0缝隙:控制总线拉低60
120us,然后释放总线(dq会在15
45us之间采样)
.写1缝隙:控制总线拉低15us以内,然后ds18b20释放总线(dq会在15~45us之间采样)
2.wait:每一次写完1bit都需要等待1us以上
3.写完成,根据需求判断是否需要读取下个bit
四.读取DS18B20数据
READ TIME SLOTS
The DS18B20 can only transmit data to the master when the master issues read time slots. Therefore, the master must generate read time slots immediately after issuing a Read Scratchpad [BEh] or Read Power Supply [B4h] command, so that the DS18B20 can provide the requested data. In addition, the master can generate read time slots after issuing Convert T [44h] or Recall E2 [B8h] commands to find out the status of the operation as explained in the DS18B20 FUNCTION COMMAND section.
All read time slots must be a minimum of 60us in duration with a minimum of a 1us recovery time between slots. A read time slot is initiated by the master device pulling the 1-Wire bus low for a minimum of 1us and then releasing the bus (see Figure 14). After the master initiates the read time slot, the DS18B20 will begin transmitting a 1 or 0 on bus. The DS18B20 transmits a 1 by leaving the bus high and transmits a 0 by pulling the bus low. When transmitting a 0, the DS18B20 will release the bus by the end of the time slot, and the bus will be pulled back to its high idle state by the pullup resister. Output data from the DS18B20 is valid for 15us after the falling edge that initiated the read time slot. Therefore, the master must release the bus and then sample the bus state within 15us from the start of the slot.
Figure 15 illustrates that the sum of TINIT, TRC, and TSAMPLE must be less than 15us for a read time slot. Figure 16 shows that system timing margin is maximized by keeping TINIT and TRC as short as possible and by locating the master sample time during read time slots towards the end of the 15us period.
1.读时序图
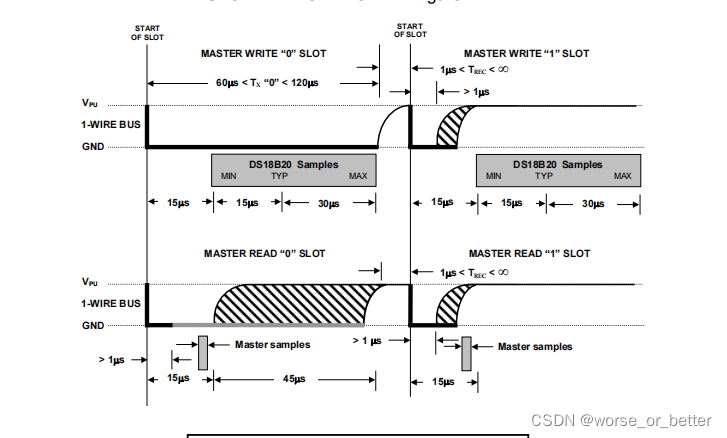

2.读数据过程
1.控制总线拉低
1us
以上,然后释放总线
2.读取数据:最好在
10-14us
3.wait:读1bit整个过程需要
60us
4.wait_bit:每读完1bit需要等待
1us
以上
5.读完成,根据需求判断是否需要读取下个bit
五. 状态转换以及整体框架
1.状态转换

2. 整体框架

六.DS18B20接口代码
module ds18b20_driver (
input clk ,
input rst_n ,
input [1:0] req ,//开启/关闭温度检测,按键控制
output [15:0] data_out ,
inout dq
);
/* 参数定义 */
localparam IDLE = 7'b000_0001,//状态参数,独热码
INIT = 7'b000_0010,//DS18B20初始化
WRITE1 = 7'b000_0100,//第一次写跳过ROM命令和温度转换命令
WAIT = 7'b000_1000,//等待温度转换成功
WRITE2 = 7'B001_0000,//第二次写跳过ROM命令和温度读取命令
READ = 7'b010_0000,//读取温度
DONE = 7'b100_0000;
localparam T_INIT_RES = 24000 ,//初始化复位脉冲时间480us,总线释放
T_INIT_WAIT = 1500 ,//复位脉冲后等待30us
T_INIT_PP = 6000 ,//DS18B20存在脉冲120us
T_INIT_ALL = 50000 ;//初始化全过程1000us
localparam T_WRITE0_LOW = 600 ,//12us总线拉低
T_WRITE0_SP = 3000 ,//SAMPLE window 60us,总线释放
T_WRITE1_LOW = 600 ,//12us总线拉低,,总线释放
T_WRITE1_SP = 3000 ,//SAMPLE window 60us
T_BIT_WAIT = 100 ,//1bit写完等待时间2us
T_WRITE = 3600 ,//写72us
T_WRITE_BIT = 3700 ;//写全过程时间 74us
localparam T_CONV = 37_500_000;//温度转换时间
localparam T_READ_LOW = 100 ,//拉低总线2us
T_READ_DATA = 600 ,//在12us读取数据
T_READ_SLOT = 3000 ,//READ SLOT,总线释放
T_READ_WAIT = 100 ,//1BIT等待时间
T_READ = 3200 ,//读64us
T_READ_BIT = 3300 ;//读取数据全过程时间66us
/* 信号定义 */
reg dq_out_en;//三态门选择
reg dq_out;
wire dq_in;
reg slave_ack;//DS18B20初始化是否成功信号
reg [15:0] command;
reg [15:0] data_out_r;
reg [6:0] state_c ;//状态信号
reg [6:0] state_n ;
wire idle_init ;
wire init_write1;
wire init_write2;
wire write1_wait;
wire wait_init ;
wire write2_read;
wire read_done ;
wire done_idle ;
reg start_flag ;//开始信号
reg write1_over;//第一次命令写完
reg [31:0] time_cnt;//计数器
wire add_time_cnt;
wire end_time_cnt;
reg [31:0] time_cnt_sel;//计数选择
reg [4:0] bit_cnt;//bit计数器
wire add_bit_cnt;
wire end_bit_cnt;
//start_flag开始信号
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
start_flag <= 0;
end
else if(req[0])begin
start_flag <= 1;
end
else if(req[1])begin
start_flag <= 0;
end
end
//状态转换
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
state_c <= IDLE;
end
else begin
state_c <= state_n;
end
end
always @(*) begin
case(state_c)
IDLE :
if (idle_init) begin
state_n = INIT;
end
else begin
state_n = state_c;
end
INIT :
if (init_write1) begin
state_n = WRITE1;
end
else if (init_write2) begin
state_n = WRITE2;
end
else begin
state_n = state_c;
end
WRITE1 :
if (write1_wait) begin
state_n = WAIT;
end
else begin
state_n = state_c;
end
WAIT :
if (wait_init) begin
state_n = INIT;
end
else begin
state_n = state_c;
end
WRITE2 :
if (write2_read) begin
state_n = READ;
end
else begin
state_n = state_c;
end
READ :
if (read_done) begin
state_n = DONE;
end
else begin
state_n = state_c;
end
DONE :
if (done_idle) begin
state_n = IDLE;
end
else begin
state_n = state_c;
end
default : state_n <= state_c ;
endcase
end
assign idle_init = state_c == IDLE && start_flag ;
assign init_write1 = state_c == INIT && end_time_cnt && write1_over == 0 && slave_ack ;
assign init_write2 = state_c == INIT && end_time_cnt && write1_over && slave_ack;
assign write1_wait = state_c == WRITE1 && end_bit_cnt ;
assign wait_init = state_c == WAIT && end_time_cnt;
assign write2_read = state_c == WRITE2 && end_bit_cnt ;
assign read_done = state_c == READ && end_bit_cnt ;
assign done_idle = state_c == DONE && 1'b1;
//write1_over
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
write1_over <= 0;
end
else if(write1_wait)begin
write1_over <= 1'b1;
end
else if(write2_read)begin
write1_over <= 1'b0;
end
end
//计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
time_cnt <= 0;
end
else if(add_time_cnt)begin
if(end_time_cnt)begin
time_cnt <= 0;
end
else begin
time_cnt <= time_cnt + 1;
end
end
else begin
time_cnt <= time_cnt;
end
end
assign add_time_cnt = (state_c != IDLE || state_c != DONE) ;
assign end_time_cnt = add_time_cnt && time_cnt == time_cnt_sel - 1;
//时间计数选择
always @(*)begin
case(state_c)
INIT : time_cnt_sel = T_INIT_ALL ;
WRITE1 : time_cnt_sel = T_WRITE_BIT ;
WAIT : time_cnt_sel = T_CONV ;
WRITE2 : time_cnt_sel = T_WRITE_BIT ;
READ : time_cnt_sel = T_READ_BIT ;
default: time_cnt_sel = 10;
endcase
end
//bit计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
bit_cnt <= 0;
end
else if(add_bit_cnt)begin
if(end_bit_cnt)begin
bit_cnt <= 0;
end
else begin
bit_cnt <= bit_cnt + 1;
end
end
else begin
bit_cnt <= bit_cnt;
end
end
assign add_bit_cnt = (state_c == WRITE1 ||state_c == WRITE2|| state_c == READ) && end_time_cnt;
assign end_bit_cnt = add_bit_cnt && bit_cnt == 16-1;
//command
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
command <= 0;
end
else if(state_c == WRITE1)begin
command <= 16'h44CC;
end
else if(state_c == WRITE2)begin
command <= 16'hBECC;
end
end
//slave_ack
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
slave_ack <= 0;
end
else if(state_c == INIT && dq_in == 0 )begin
slave_ack <= 1;
end
else if(state_c != INIT)begin
slave_ack <= 0;
end
end
//初始化,写命令,读取数据DS18B20
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
dq_out <= 0;
dq_out_en <= 0;
data_out_r <= 0;
end
else if (state_c == INIT) begin
if(time_cnt <= T_INIT_RES ) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == (T_INIT_RES + T_INIT_WAIT)) begin
dq_out_en <= 1'b0;
end
end
else if(state_c == WRITE1 )begin
if (time_cnt < T_WRITE0_LOW ) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == T_WRITE0_LOW && command[bit_cnt] == 0) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == T_WRITE) begin
dq_out_en <= 1'b0;
end
else if(time_cnt == T_WRITE0_LOW && command[bit_cnt] == 1)begin
dq_out_en <= 1'b0;
end
end
else if(state_c == WRITE2 )begin
if (time_cnt < T_WRITE0_LOW ) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == T_WRITE0_LOW && command[bit_cnt] == 0) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == T_WRITE) begin
dq_out_en <= 1'b0;
end
else if(time_cnt == T_WRITE0_LOW && command[bit_cnt] == 1)begin
dq_out_en <= 1'b0;
end
end
else if(state_c == READ )begin
if (time_cnt < T_READ_LOW ) begin
dq_out <= 1'b0;
dq_out_en <= 1'b1;
end
else if (time_cnt == T_READ_LOW ) begin
dq_out_en <= 1'b0;
end
else if (time_cnt == T_READ_DATA) begin
data_out_r[bit_cnt] <= dq_in;
end
end
end
assign data_out = data_out_r;
assign dq = dq_out_en?dq_out:1'bz;
assign dq_in = dq;
endmodule //ds18b20_driver