(1)建立零件并保存
(2)新建一个装配体,导入刚刚建立的零件
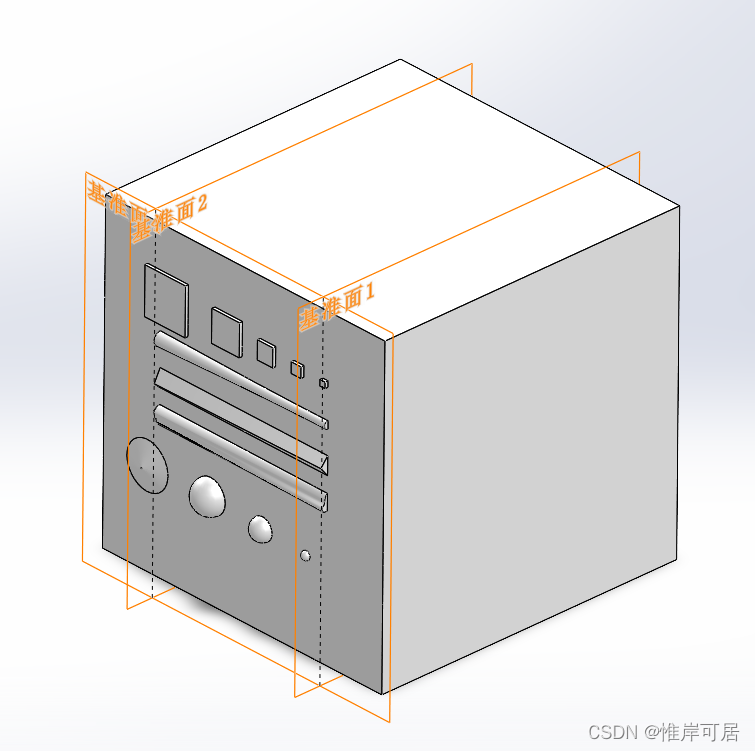
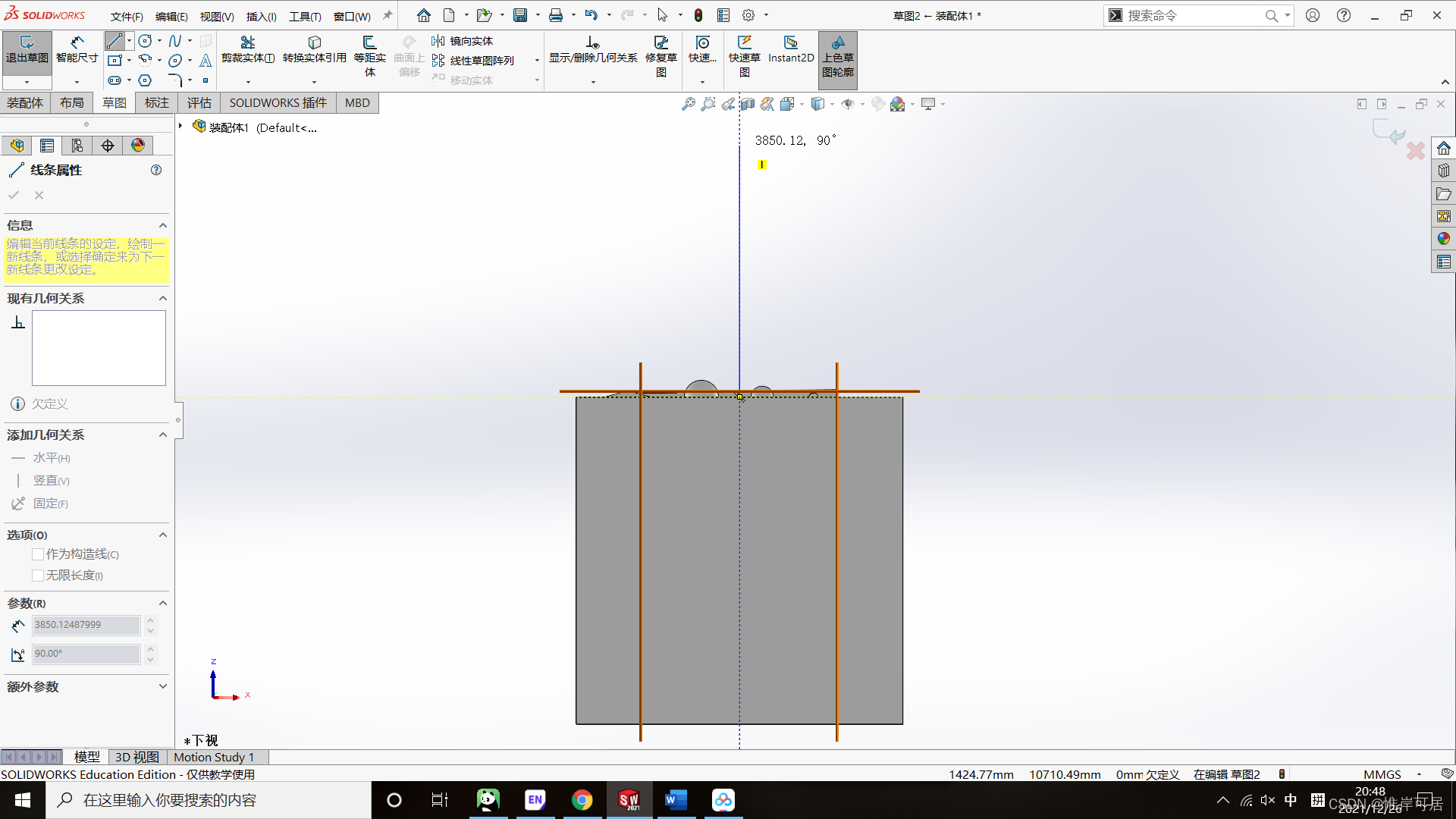
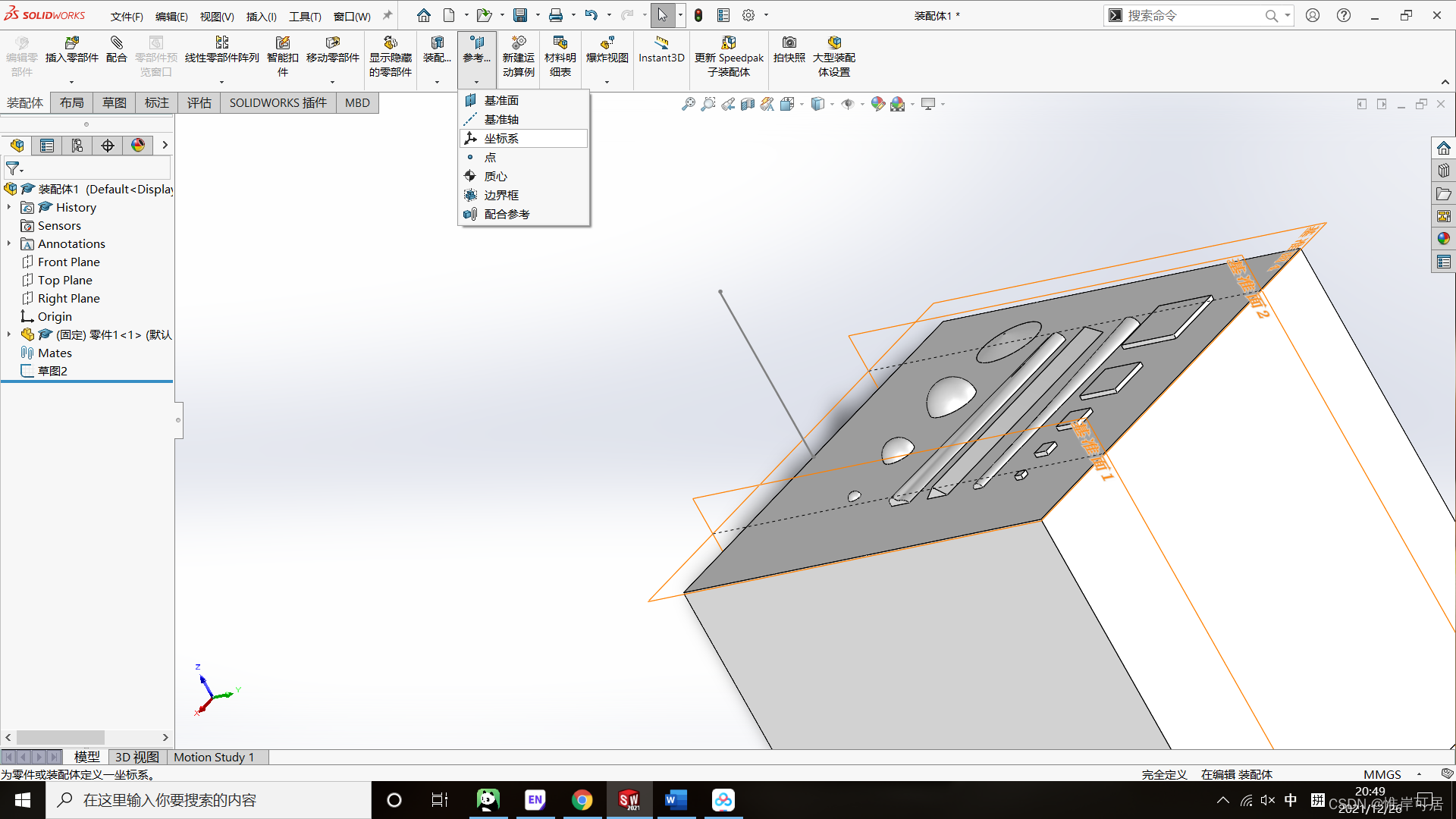
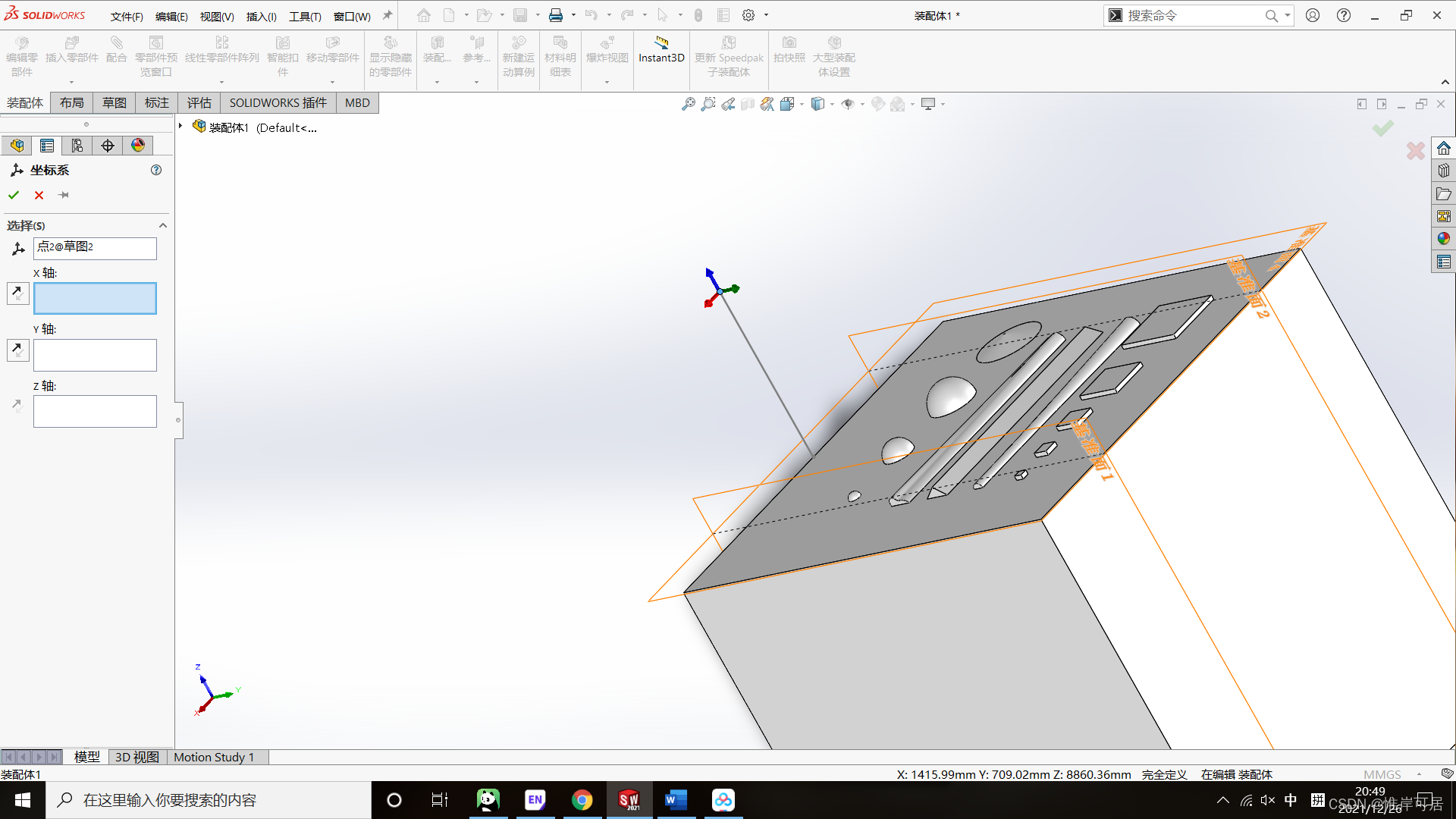
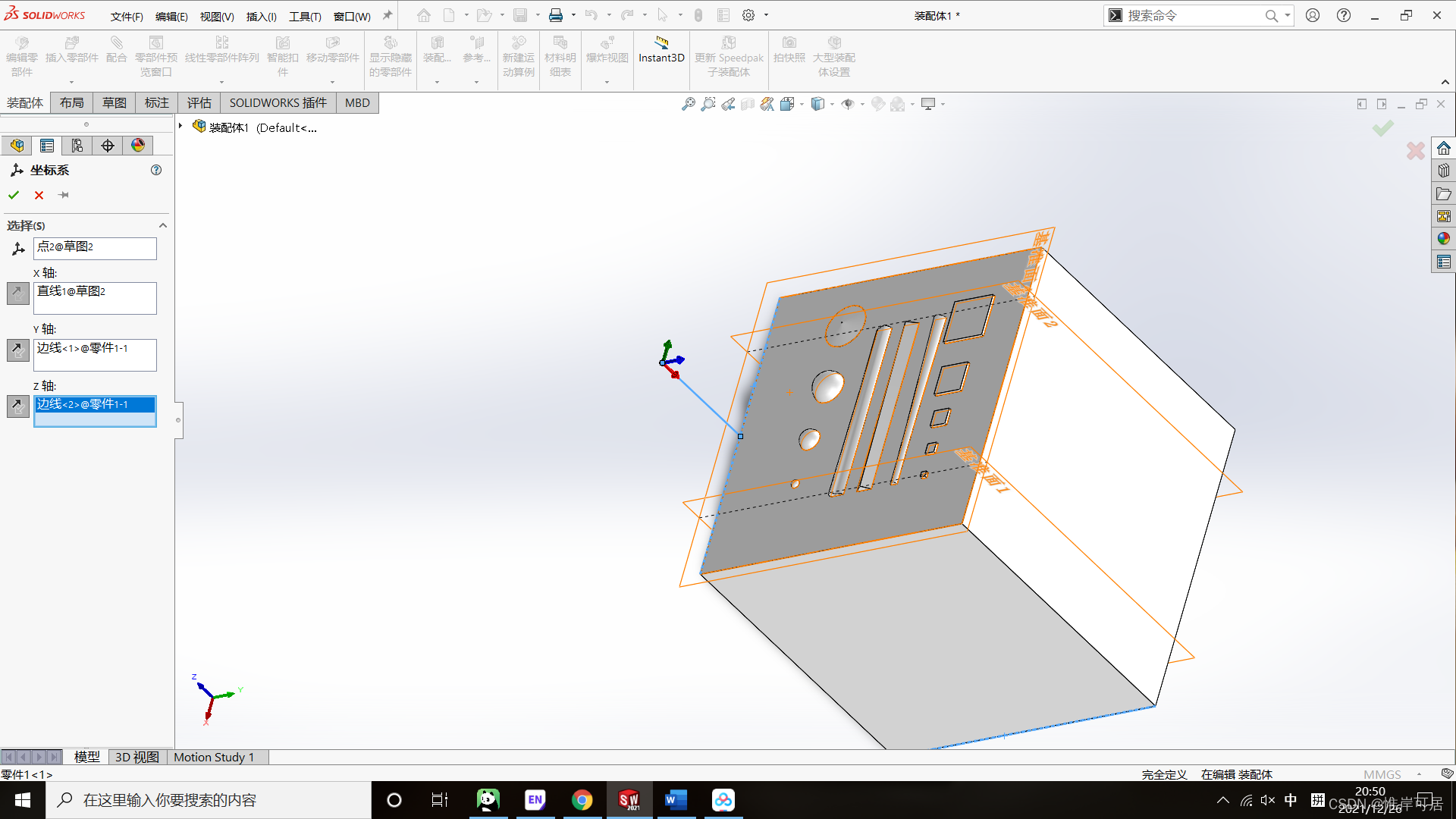
(3)建立一个坐标系,这个坐标系的位置将与gazebo的原点重合,方向与gazebo原点坐标系方向一致。所以原点位置和方向要在这里就设置好。建立坐标系的过程如下:
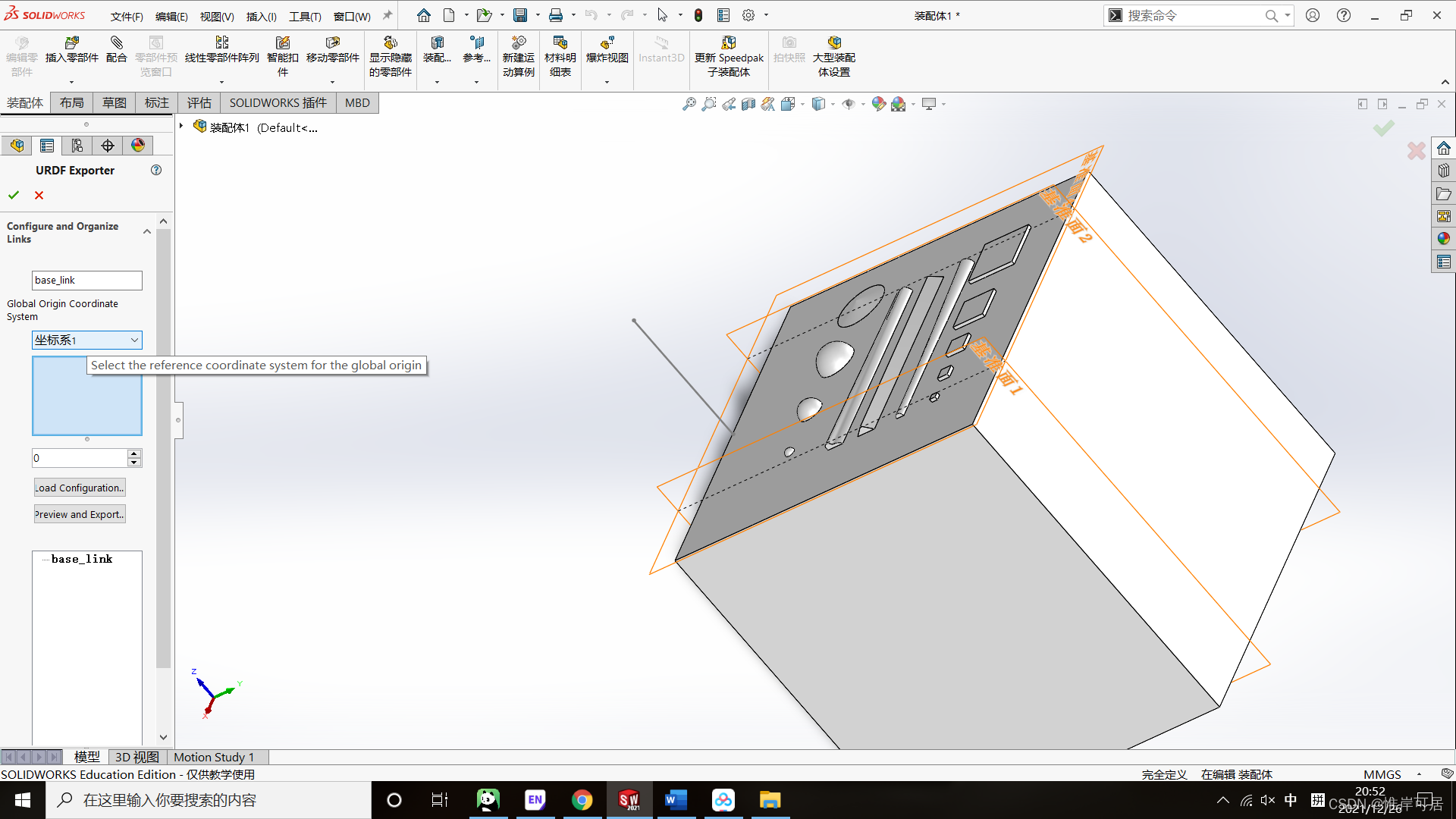
(4)工具->tool->export as URDF
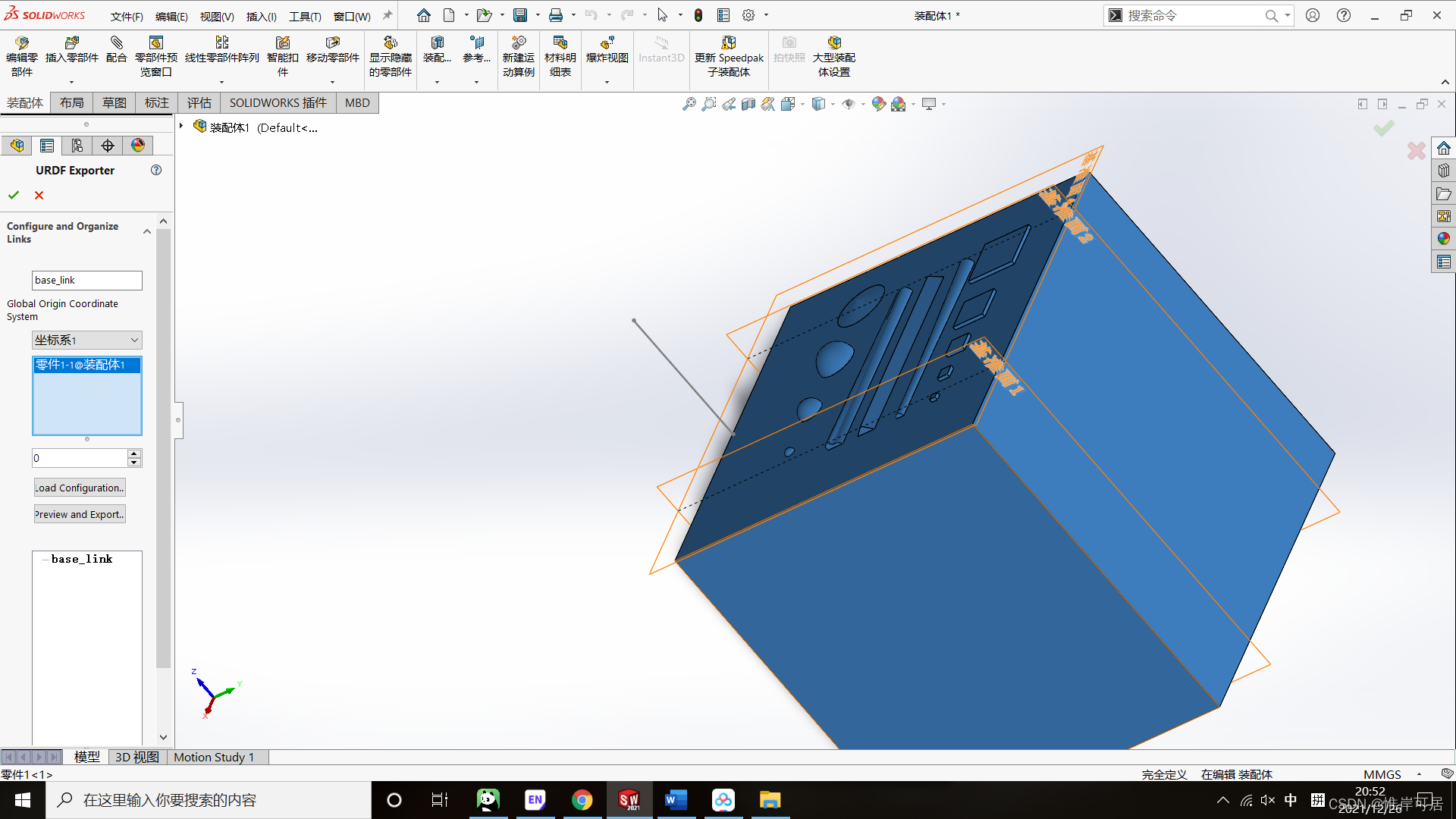
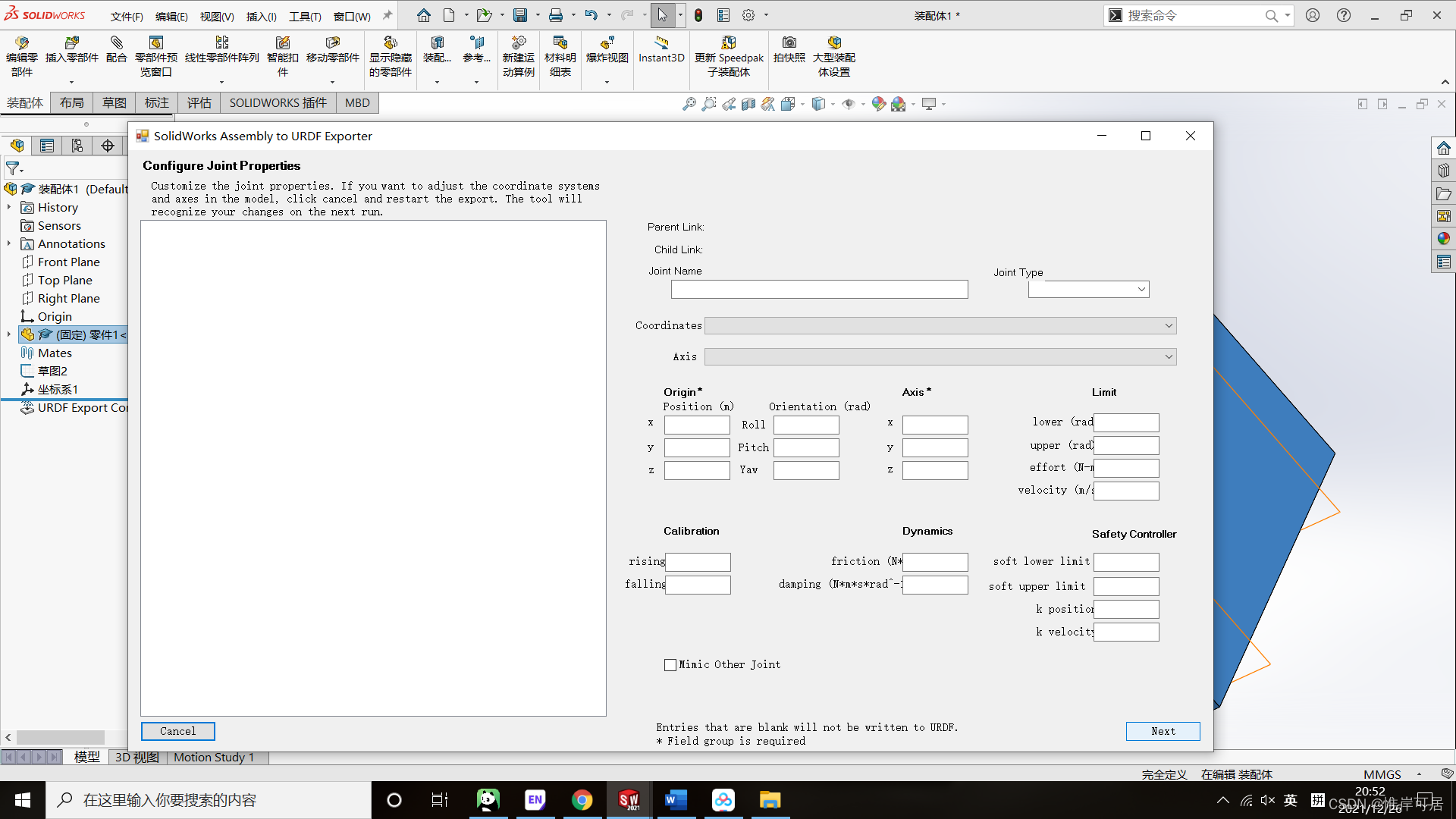
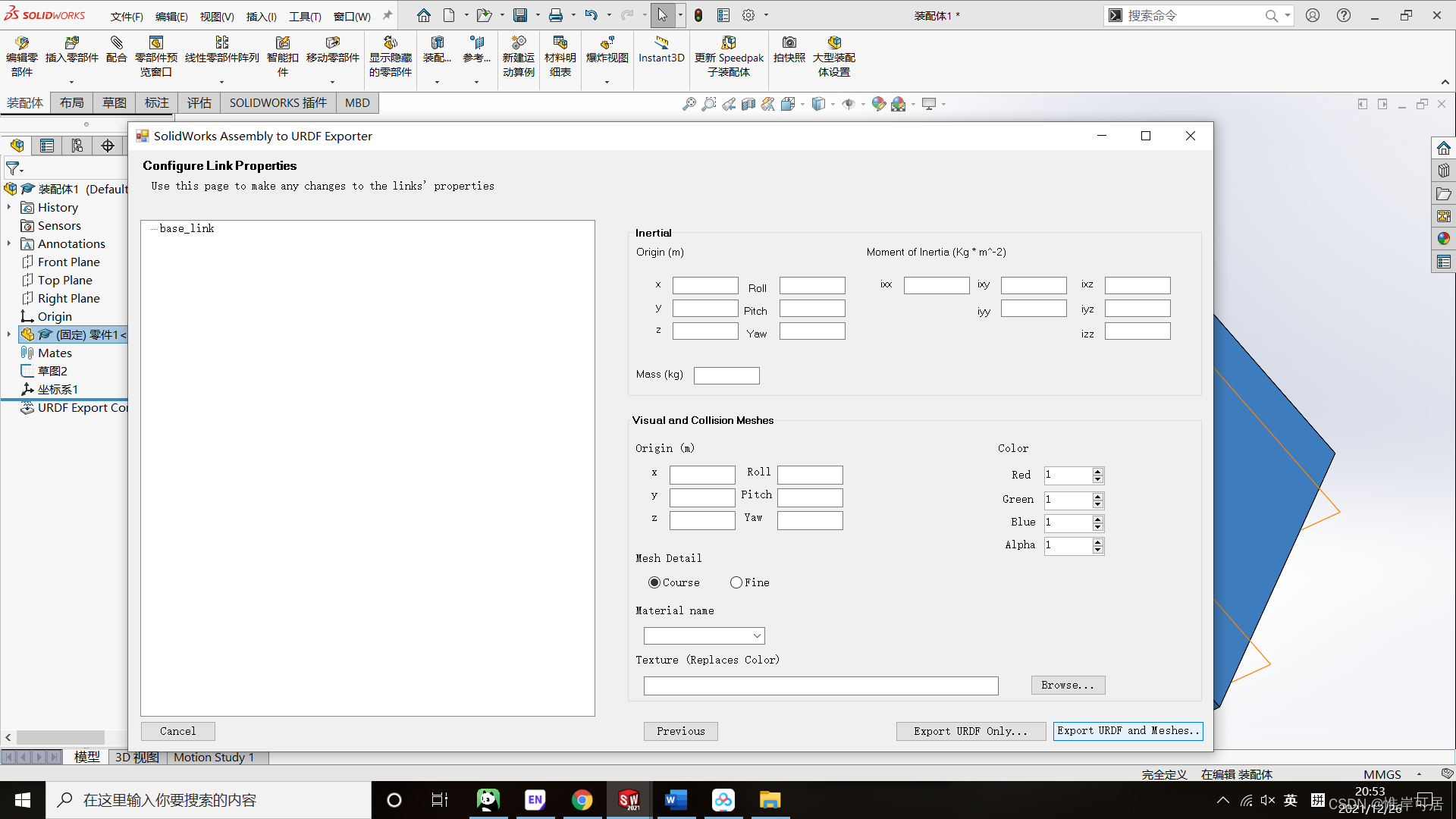
(5)导出URDF,步骤如下(因为没有关节,所以关节什么的都不用设置)
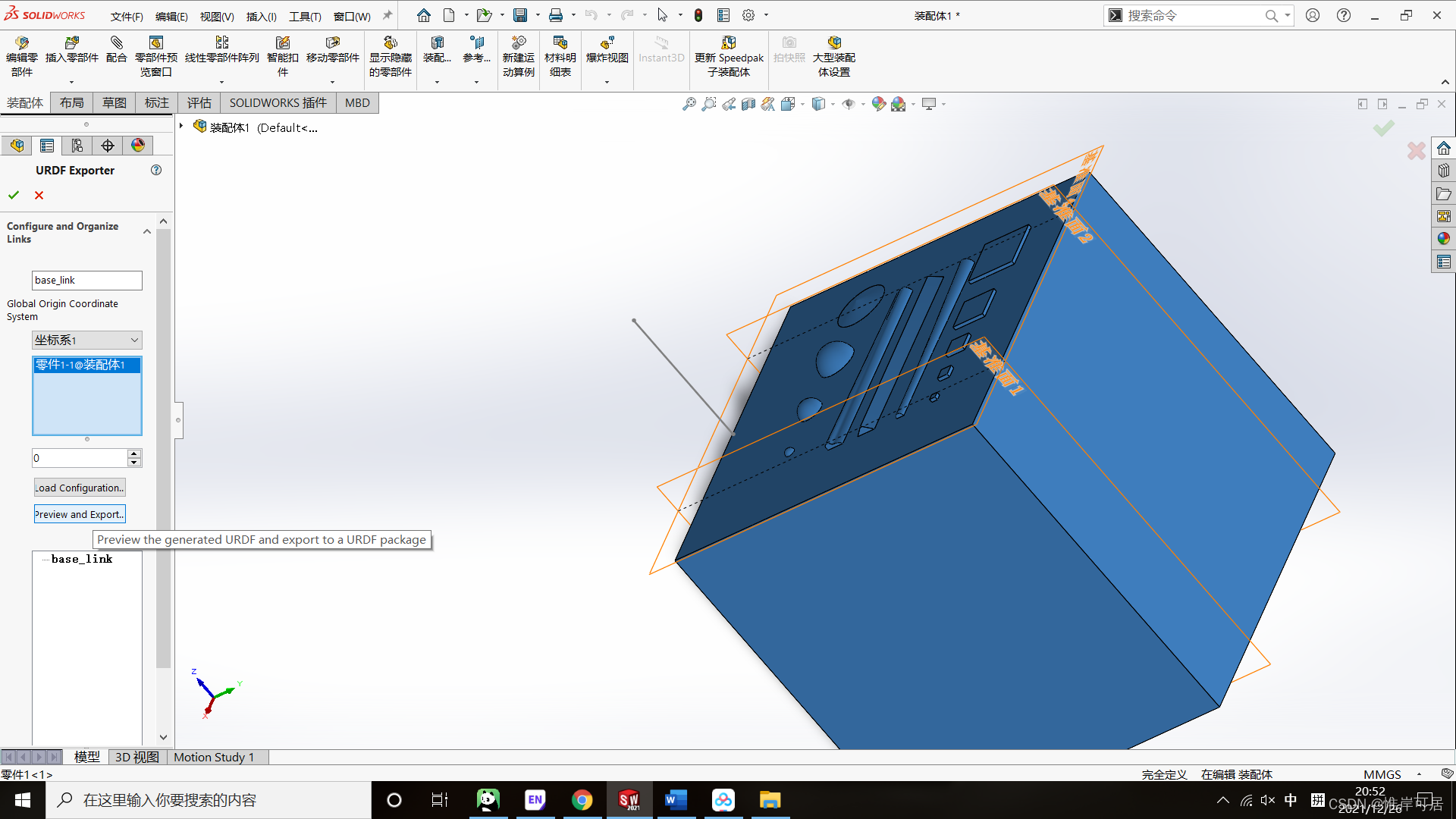
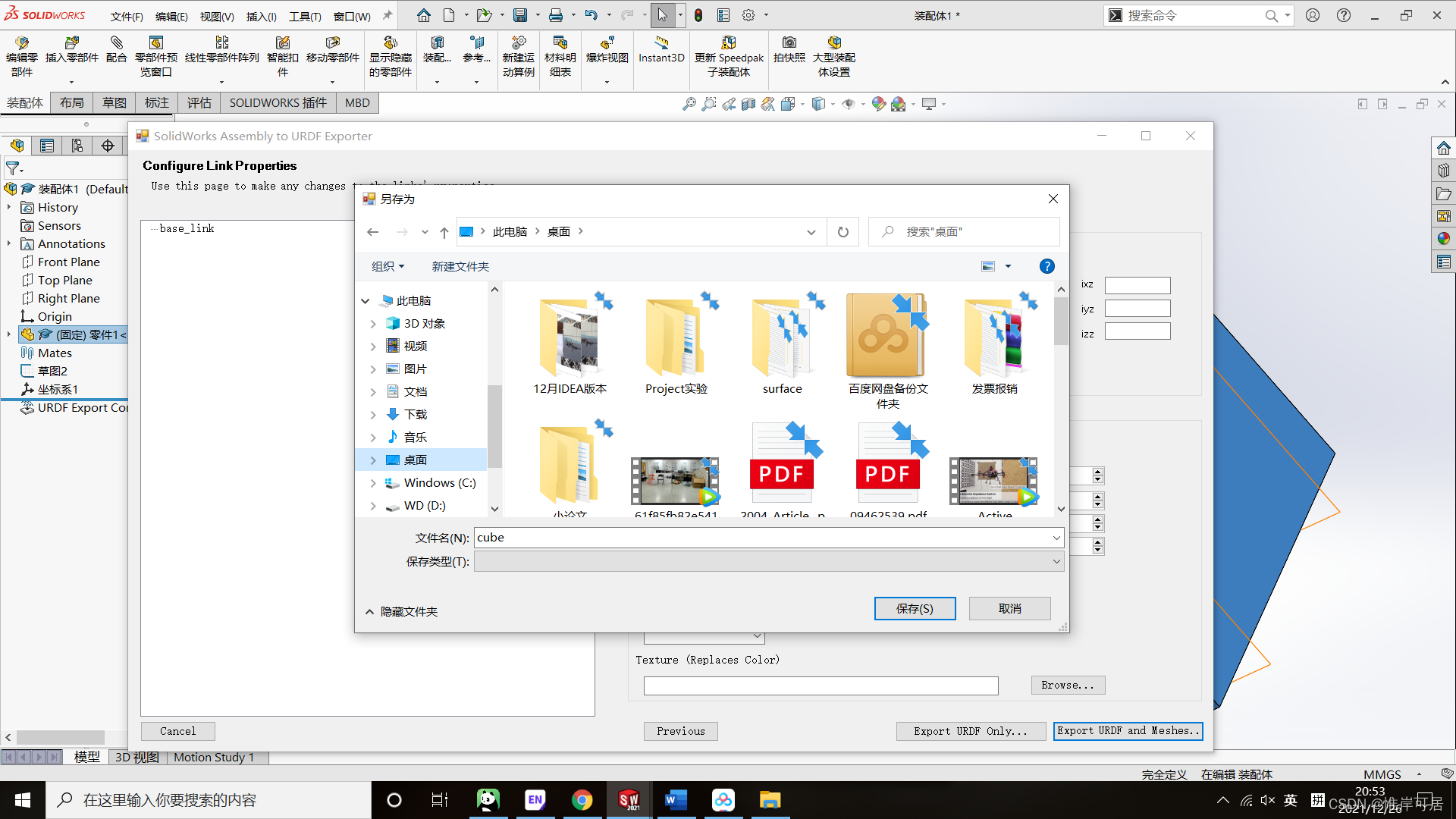
(6)生成的cube(本案例自己起的名字)就是一个ros包,所以直接放入ros工作空间下编译就行,什么都不用改(需要改质量什么的也可以改)。然后,在gazebo的launch文件中加
<node
name="spawn_model"
pkg="gazebo_ros"
type="spawn_model"
args="-file $(find cube)/urdf/cube.urdf -urdf -model cube"
output="screen" />
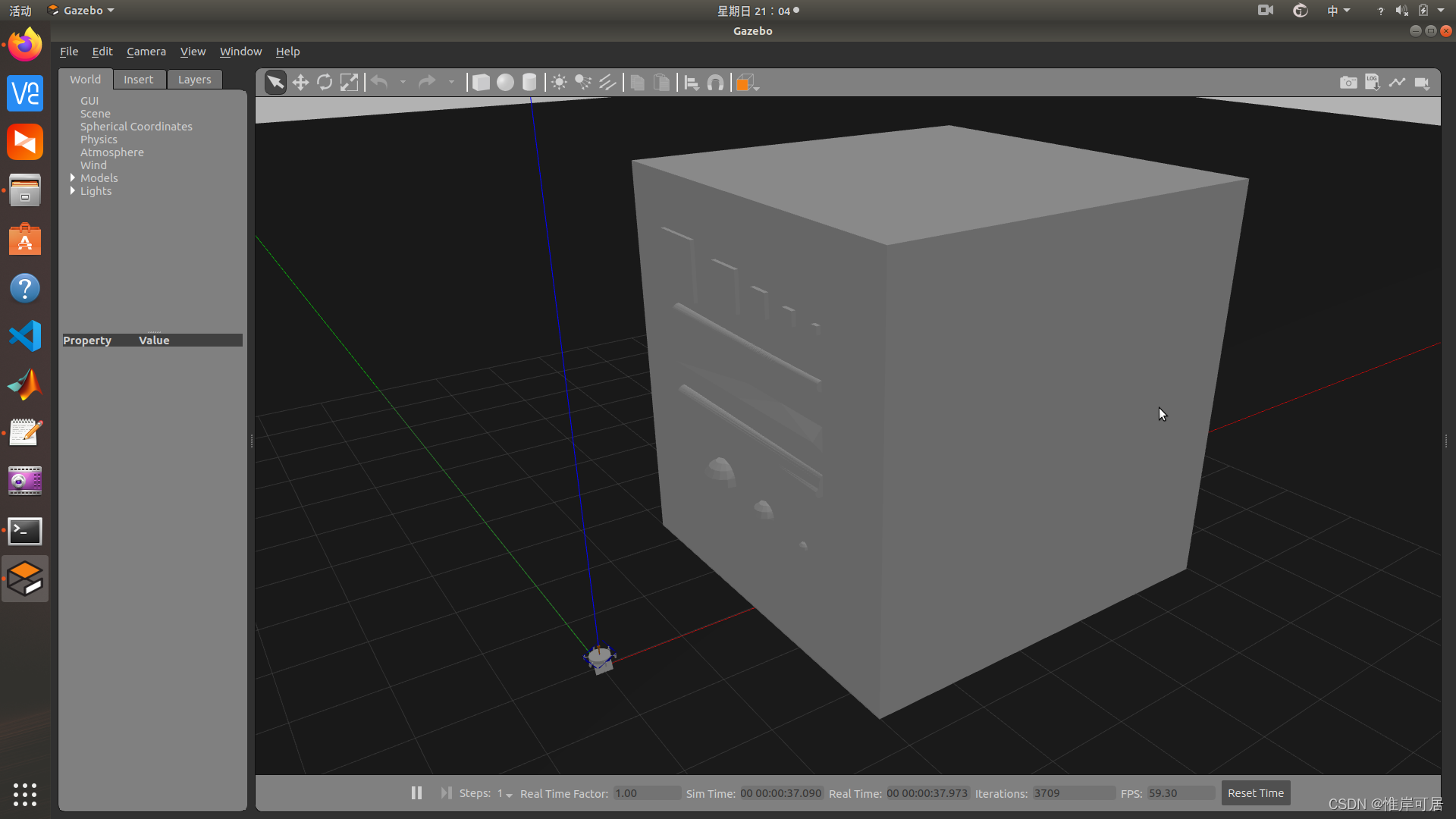
即可,看看导入效果叭:
版权声明:本文为qq_41688066原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。