1、算法介绍
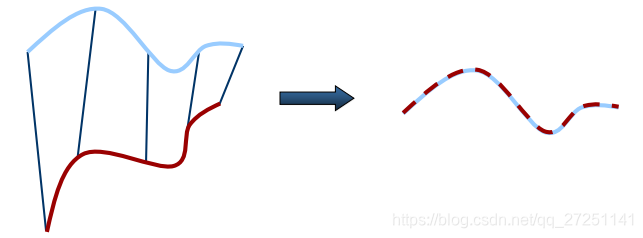
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法。用数学语言描述如下,即ICP算法的实质是基于最小二乘法的最优匹配,它重复进行“确定对应关系的点集→计算最优刚体变换”的过程,直到某个表示正确匹配的收敛准则得到满足。
ICP算法基本思想:
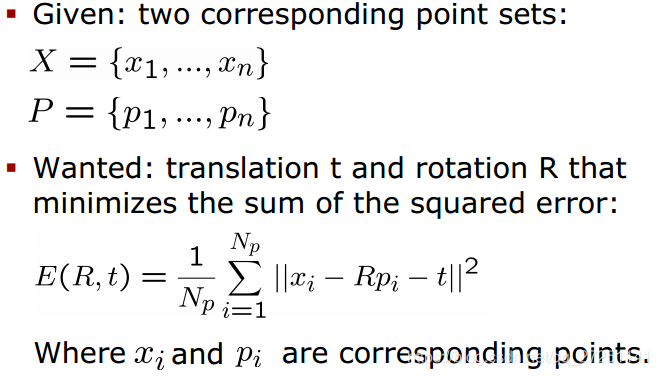
如果知道正确的点对应,那么两个点集之间的相对变换(旋转、平移)就可以求得封闭解。
首先计算两个点集X和P的质心,分别为μx和μp

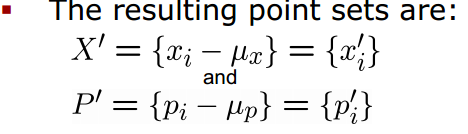
然后在两个点集中分别减去对应的质心(Subtract the corresponding center of mass from every point in the two point sets before calculating the transformation)
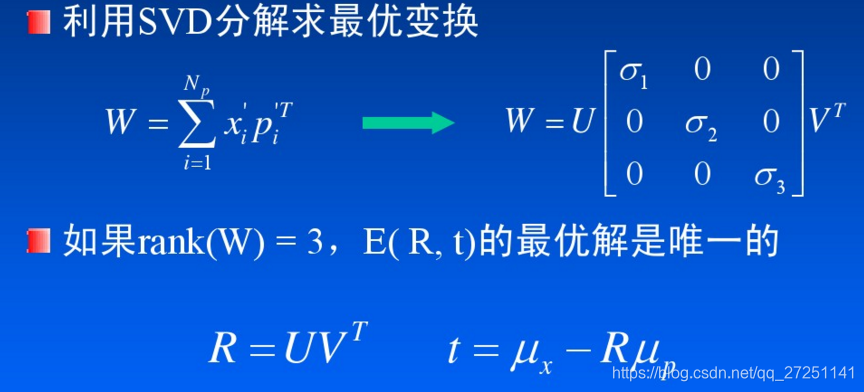
目标函数E(R,t)的优化是ICP算法的最后一个阶段。在求得目标函数后,采用什么样的方法来使其收敛到最小,也是一个比较重要的问题。求解方法有基于奇异值分解的方法、四元数方法等。
如果初始点“足够近”,可以保证收敛性
2、算法优缺点
ICP算法优点:
可以获得非常精确的配准效果
不必对处理的点集进行分割和特征提取
在较好的初值情况下,可以得到很好的算法收敛性
ICP算法的不足之处:
在搜索对应点的过程中,计算量非常大,这是传统ICP算法的瓶颈
标准ICP算法中寻找对应点时,认为欧氏距离最近的点就是对应点。这种假设有不合理之处,会产生一定数量的错误对应点
3、算法实现
实现代码C++:
#include <iostream>
#include <eigen3/Eigen/Dense>
using namespace std;
using namespace Eigen;
#define PI (double)3.141592653589793
void ICP(const vector<Vector3f>& pts1, const vector<Vector3f>& pts2);
// ICP仿真
int main(int argc, char* argv[])
{
Eigen::Vector3f p1_c1(0, 0, 20);
Eigen::Vector3f p2_c1(2, 4, 30);
Eigen::Vector3f p3_c1(5, 9, 40);
Eigen::Vector3f p4_c1(6, 8, 25);
Eigen::AngleAxisf rotation_vector(30 * PI / 180, Eigen::Vector3f(0, 1, 0));//绕y轴逆时针旋转30度(转yaw)
Eigen::Matrix<float, 3, 3> R21 = rotation_vector.toRotationMatrix();
cout << "R21: " << endl << R21 << endl;
Eigen::Vector3f t21(5, 3, 1);
Eigen::Vector3f p1_c2 = R21*p1_c1 + t21;
Eigen::Vector3f p2_c2 = R21*p2_c1 + t21;
Eigen::Vector3f p3_c2 = R21*p3_c1 + t21;
Eigen::Vector3f p4_c2 = R21*p4_c1 + t21;
vector<Vector3f> p_c1, p_c2;
p_c1.push_back(Vector3f(p1_c1[0], p1_c1[1], p1_c1[2]));
p_c1.push_back(Vector3f(p2_c1[0], p2_c1[1], p2_c1[2]));
p_c1.push_back(Vector3f(p3_c1[0], p3_c1[1], p3_c1[2]));
p_c1.push_back(Vector3f(p4_c1[0], p4_c1[1], p4_c1[2]));
p_c2.push_back(Vector3f(p1_c2[0], p1_c2[1], p1_c2[2]));
p_c2.push_back(Vector3f(p2_c2[0], p2_c2[1], p2_c2[2]));
p_c2.push_back(Vector3f(p3_c2[0], p3_c2[1], p3_c2[2]));
p_c2.push_back(Vector3f(p4_c2[0], p4_c2[1], p4_c2[2]));
ICP(p_c1, p_c2);
getchar();
return 0;
}
void ICP(const vector<Vector3f>& pts1,const vector<Vector3f>& pts2)
{
Vector3f p1, p2; // center of mass
int N = pts1.size();
for (int i = 0; i<N; i++)
{
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Vector3f((p1) / N);
p2 = Vector3f((p2) / N);
vector<Vector3f> q1(N), q2(N); // remove the center
for (int i = 0; i<N; i++)
{
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// compute q1*q2^T
Eigen::Matrix3f W = Eigen::Matrix3f::Zero();
for (int i = 0; i<N; i++)
{
W += Eigen::Vector3f(q1[i](0), q1[i](1), q1[i](2)) * Eigen::Vector3f(q2[i](0), q2[i](1), q2[i](2)).transpose();
}
// SVD on W
Eigen::JacobiSVD<Eigen::Matrix3f> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3f U = svd.matrixU();
Eigen::Matrix3f V = svd.matrixV();
Eigen::Matrix3f R_12 = U* (V.transpose());
Eigen::Vector3f t_12 = Eigen::Vector3f(p1(0), p1(1), p1(2)) - R_12 * Eigen::Vector3f(p2(0), p2(1), p2(2));
// 验证
Eigen::AngleAxisf R_21;
R_21.fromRotationMatrix(R_12.transpose());
cout << "aix: " << R_21.axis().transpose() << endl;
cout << "angle: " << R_21.angle() * 180 / PI << endl;
cout << "t: " << (-R_12.transpose()*t_12).transpose() << endl;
}