1、CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
roscore
成功打开后终端所示:
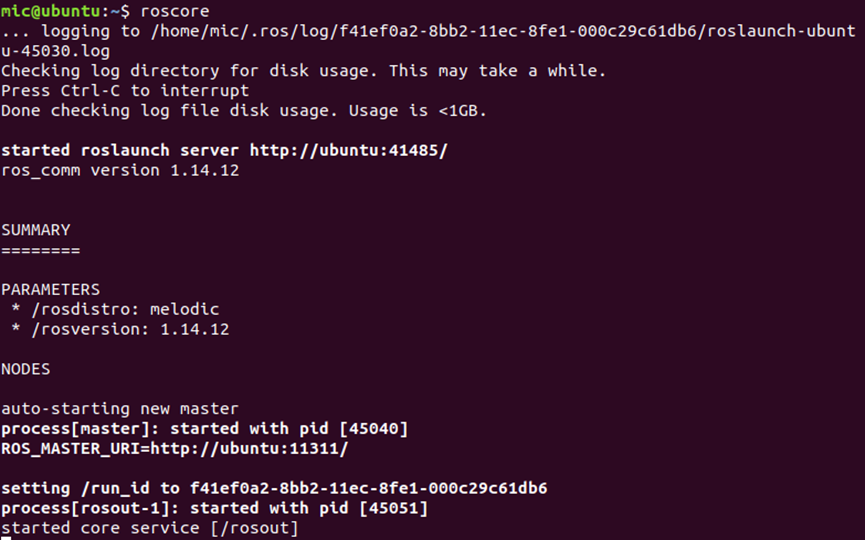
里面显示有ROS的版本,还有一些节点、端号等内容。
2、再打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
3、出现一个小乌龟的LOGO后,再打开一个新的终端(Termial),输入以下命令
rosrun turtlesim turtle_teleop_key
然后,通过方向键控制小乌龟的移动
4、打开新的Termial,输入以下命令,可以查看ROS节点信息:
rosrun rqt_graph rqt_graph
如果能顺利进行到这一步,说明ROS安装
成功
了。
版权声明:本文为weixin_45532870原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。