网络流
流网络:
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)是一个有向图,网络中有两个特殊点:源点s与汇点t。容量用
c
c
c表示,流量用
f
f
f表示
流网络G中满足两个性质:1、容量限制(通过一条边的流量不会超过该边的容量),2、流量守恒(从源点s流出的量=最终到达汇点t的量;除了源点s和汇点t外,流入一个点的量=流出一个点的量)
因为不考虑负流量,所以对于
∀
u
,
v
ε
V
,
f
(
u
,
v
)
=
f
(
v
,
u
)
\forall u,v \varepsilon V, f(u,v)=f(v,u)
∀u,vεV,f(u,v)=f(v,u)
称
f
(
u
,
v
)
f(u,v)
f(u,v)为从
u
u
u到
v
v
v的流,流
f
f
f的值定义为:
∣
f
∣
=
∑
v
ε
V
f
(
s
,
v
)
|f|=\sum_{v \varepsilon V}{f(s,v)}
∣f∣=vεV∑f(s,v)
对于流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E),设流
f
f
f为
G
G
G中的流。对于
G
G
G中的每条边
<
u
,
v
>
ε
E
<u,v> \varepsilon E
<u,v>εE,可以定义残留容量为在不超过容量限制的条件下,可以通过的额外的网络流量:
c
f
(
u
,
v
)
=
c
(
u
,
v
)
−
f
(
u
,
v
)
c_{f}(u,v)=c(u,v)-f(u,v)
cf(u,v)=c(u,v)−f(u,v)
残留网络依然是一个流网络,容量由
c
f
c_{f}
cf给出。设
f
f
f是流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)中的一个流,
f
′
f’
f′是其残留网络
G
f
G_{f}
Gf的一个流,则
f
+
f
′
f+f’
f+f′仍是网络
G
G
G的一个流。
增广路径:指的是残留网络
G
f
G_{f}
Gf上源点
s
s
s到汇点
t
t
t的一条简单路径,该路径的残留容量为可以沿该路径增加的最多额外流量
c
f
(
p
)
=
m
i
n
{
c
f
(
u
,
v
)
∣
<
u
,
v
>
ε
p
}
c_{f}(p)=min\{c_{f}(u,v)|<u,v> \varepsilon p\}
cf(p)=min{cf(u,v)∣<u,v>εp}
c
f
(
p
)
>
0
c_{f}(p)>0
cf(p)>0。
所以在残留网络中满足
c
f
(
u
,
v
)
=
{
c
(
u
,
v
)
−
f
(
u
,
v
)
,
(u,v)
ε
E
f
(
v
,
u
)
,
(v,u)
ε
E
c_{f}(u,v)= \begin{cases} c(u,v)-f(u,v), & \text{(u,v) $\varepsilon$ E} \\ f(v,u), & \text{(v,u) $\varepsilon$ E} \end{cases}
cf(u,v)={c(u,v)−f(u,v),f(v,u),(u,v) ε E(v,u) ε E
意思就是残留网络分为两种边,一种是原图中的边,
c
f
(
u
,
v
)
c_{f}(u,v)
cf(u,v)就是表示这条边还能再流过多少流量,另一种是原图中的边的反向边,
c
f
(
u
,
v
)
c_{f}(u,v)
cf(u,v)就是表示通过反向边能往回退多少流量
例:
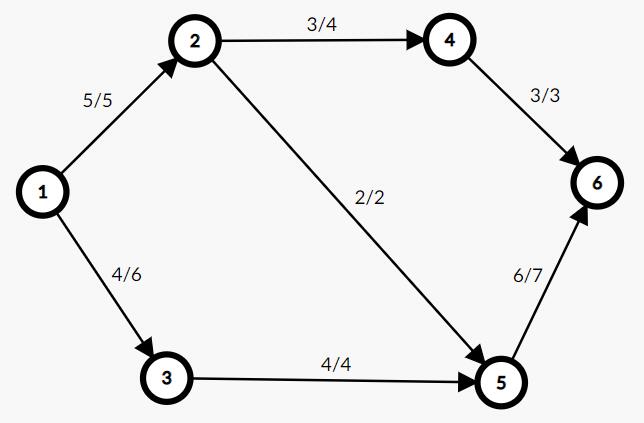
上图为原图中每条边流量/容量
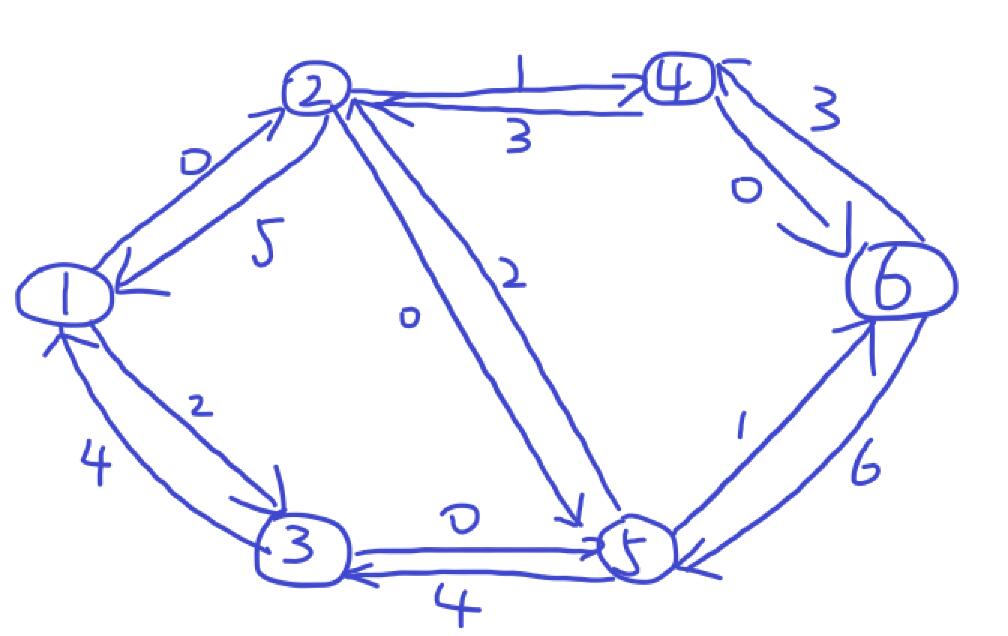
上图为残留网络中正向边和反向边容量的情况。通过增广路径的定义,我们可知无法从残留网络中找到一条可以从源点s走到汇点t并且边的容量大于0的路径
一个网络中的最大流也称为最大可行流。
流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)的割
[
S
,
T
]
[S,T]
[S,T]将点集
V
V
V划分为
S
S
S和
T
(
T
=
V
−
S
)
T(T=V-S)
T(T=V−S)两部分,使得源点
s
ε
S
s \varepsilon S
sεS且汇点
t
ε
T
t \varepsilon T
tεT。符号
[
S
,
T
]
[S,T]
[S,T]代表一个边集合
{
<
u
,
v
>
∣
<
u
,
v
>
ε
E
,
u
ε
S
,
v
ε
T
}
\{<u,v>|<u,v> \varepsilon E,u \varepsilon S,v \varepsilon T\}
{<u,v>∣<u,v>εE,uεS,vεT}。穿过割
[
S
,
T
]
[S,T]
[S,T]的流量定义为
f
(
S
,
T
)
f(S,T)
f(S,T),割
[
S
,
T
]
[S,T]
[S,T]的容量定义为
c
(
S
,
T
)
c(S,T)
c(S,T)。
割的容量:
c
(
S
,
T
)
=
∑
u
ε
S
∑
v
ε
T
c
(
u
,
v
)
割的流量:
f
(
S
,
T
)
=
∑
u
ε
S
∑
v
ε
T
f
(
u
,
v
)
−
∑
u
ε
T
∑
v
ε
S
f
(
u
,
v
)
割的容量:c(S,T)=\sum_{u \varepsilon S}\sum_{v \varepsilon T}c(u,v)\\ 割的流量:f(S,T)=\sum_{u \varepsilon S}\sum_{v \varepsilon T}f(u,v) – \sum_{u \varepsilon T}\sum_{v \varepsilon S}f(u,v)
割的容量:c(S,T)=uεS∑vεT∑c(u,v)割的流量:f(S,T)=uεS∑vεT∑f(u,v)−uεT∑vεS∑f(u,v)
一个网络的最小割也就是该网络中容量最小的割。
割与流的关系:在一个流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)中,设其任意一个流为
f
f
f,且
[
S
,
T
]
[S,T]
[S,T]为
G
G
G的一个割,则通过割的流量为
f
(
S
,
T
)
=
∣
f
∣
f(S,T)=|f|
f(S,T)=∣f∣。(从源点s流出的流量=流入汇点t的流量,所有流量一定通过某些边流过去)
推论:在一个流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)中,设其任意一个流为
f
f
f,任意一个割为
[
S
,
T
]
[S,T]
[S,T],必有
∣
f
∣
≤
c
[
S
,
T
]
|f| \leq c[S,T]
∣f∣≤c[S,T]。
最大流最小割定理:如果
f
f
f是具有源点s和汇点t的流网络
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)中的一个流,则下列条件是等价的:
(
1
)
f
是
G
的一个最大流
(
2
)
残留网络
G
f
不包含增广路径
(
3
)
对
G
的某个割
[
S
,
T
]
,
有
∣
f
∣
=
c
[
S
,
T
]
(1)\quad f是G的一个最大流\\ (2)\quad 残留网络G_{f}不包含增广路径\\ (3)\quad 对G的某个割[S,T],有|f|=c[S,T]
(1)f是G的一个最大流(2)残留网络Gf不包含增广路径(3)对G的某个割[S,T],有∣f∣=c[S,T]
在求最大流算法中时间复杂度均为上限,与实际差距较大,可以简单认为EK算法可以求解点+边的和为
1
0
3
−
1
0
4
10^{3}-10^{4}
103−104大小的数据量,Dinic算法可以求解点+边的和为
1
0
4
−
1
0
5
10^{4}-10^{5}
104−105大小的数据量,求最大流时,EK算法和Dinic算法维护的都是残留网络。网络流问题的题目关键在于如何建图,怎么求只需要拉板子即可。
EK算法
时间复杂度上限
O
(
n
m
2
)
O(nm^{2})
O(nm2)
算法步骤:1、找增广路,2、更新残留网络(
G
f
−
>
G
f
+
f
′
G_{f}->G_{f+f’}
Gf−>Gf+f′),一直到找不到增广路为止
更新残留网络:若正向边容量为
c
1
c_{1}
c1,反向边容量为
c
2
c_{2}
c2,假如多流了
k
k
k,所以正向边容量为
c
1
−
k
c_{1}-k
c1−k,反向边容量为
c
2
+
k
c_{2}+k
c2+k。
用邻接表的好处就是,如果边的下标从0开始,根据二进制运算的性质,它的反向边^1=它的正向边.
AC代码:
#include <bits/stdc++.h>
using namespace std;
using LL = long long;
int n, m, s, t;
int head[210], e[10010], ne[10010], idx, pre[210];
LL f[10010], w[210];
//f记录的是容量
//w数组是指从源点s开始走到第i点路径上所有边的容量的最小值
bool vis[210];
void add(int u, int v, int c) {
//正向边
e[idx] = v;
f[idx] = c;
ne[idx] = head[u];
head[u] = idx++;
//反向边
e[idx] = u;
f[idx] = 0;
ne[idx] = head[v];
head[v] = idx++;
}
bool bfs() {
memset(vis, false, sizeof(vis));
queue<int> q;
q.push(s);
vis[s] = true;
w[s] = 1e18;
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = head[u]; ~i; i = ne[i]) {
int v = e[i];
if (!vis[v] && f[i]) {
vis[v] = true;
pre[v] = i;//前驱边
w[v] = min(w[u], f[i]);//到当前结点的最小容量=min(上一个点的最小容量,当前边的容量)
if (v == t) {
return true;
}
q.push(v);
}
}
}
return false;
}
LL EK() {
LL ans = 0;
while (bfs()) {
//由于每次只走一条增广路的边,所以每次都要加上w[t]
//表示每一条增广路上从源点s走到汇点t这条路径上边的容量的最小值
ans += w[t];
for (int i = t; i != s; i = e[pre[i] ^ 1]) {//下一个点是前驱边的反向边所到达的点
//前驱边所到达的点对应的流量减
f[pre[i]] -= w[t];
//前驱边的反向边所到达的点对应的流量加
f[pre[i] ^ 1] += w[t];
}
}
return ans;
}
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
cin >> n >> m >> s >> t;
memset(head, -1, sizeof(head));
for (int i = 0; i < m; i++) {
int u, v, c;
cin >> u >> v >> c;
add(u, v, c);
}
cout << EK() << '\n';
return 0;
}
Dinic算法
时间复杂度上限
O
(
n
2
m
)
O(n^2m)
O(n2m)
步骤:1、bfs->建立分层图,判断有没有增广路2、dfs->找出所有能增广的路径,因为dfs不回溯,所以时间复杂度不是指数级别
Dinic算法对各种优化非常敏感,需要谨慎优化,少加一个优化都可能会TLE
AC代码:
#include <bits/stdc++.h>
using namespace std;
using LL = long long;
int n, m, s, t;
int e[10010], ne[10010], head[210], idx;
int d[210], cur[210];
LL f[10010], w[10010];
void add(int u, int v, int c) {
e[idx] = v;
f[idx] = c;
ne[idx] = head[u];
head[u] = idx++;
e[idx] = u;
f[idx] = 0;
ne[idx] = head[v];
head[v] = idx++;
}
bool bfs() {
memset(d, -1, sizeof(d));
queue<int> q;
q.push(s);
d[s] = 0;
cur[s] = head[s];
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = head[u]; ~i; i = ne[i]) {
int v = e[i];
if (d[v] == -1 && f[i]) {
//d[]建立分层图,强制把u的下一个点连到v上
d[v] = d[u] + 1;
//cur[]记录当前点应该从所有连出去的边的哪一条开始遍历
//因为在dfs的时候会删掉分层图上的边且永远不会用到了
cur[v] = head[v];
if (v == t) {
return true;
}
q.push(v);
}
}
}
return false;
}
LL dfs(int u, LL limit) {
if (u == t) {
return limit;
}
LL flow = 0;
for (int i = cur[u]; ~i && flow < limit; i = ne[i]) {
int v = e[i];
cur[u] = i;
if (d[v] == d[u] + 1 && f[i]) {
LL now = dfs(v, min(f[i], limit - flow));
if (now == 0) {
//说明v这个点已经流满了 以后绝对用不到了 所以从分层图上删掉
d[v] = -1;
}
f[i] -= now;
f[i ^ 1] += now;
flow += now;
}
}
return flow;
}
LL Dinic() {
LL ans = 0, flow;
while (bfs()) {//每一次尽可能多的建立分层图 找到增广路
while (flow = dfs(s, 1e18)) {//每一次求得新的增广路的流量
ans += flow;
}
}
return ans;
}
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
cin >> n >> m >> s >> t;
memset(head, -1, sizeof(head));
for (int i = 0; i < m; i++) {
int u, v, c;
cin >> u >> v >> c;
add(u, v, c);
}
cout << Dinic() << '\n';
return 0;
}