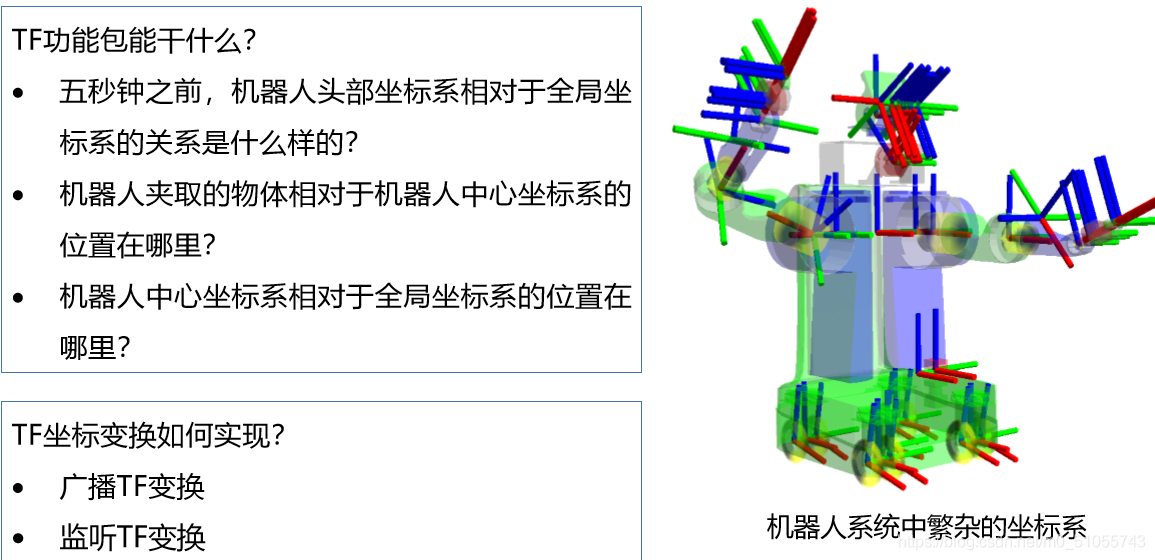
TF有一个时间属性,默认会记录10s之内,机器人所有坐标之间的位置关系
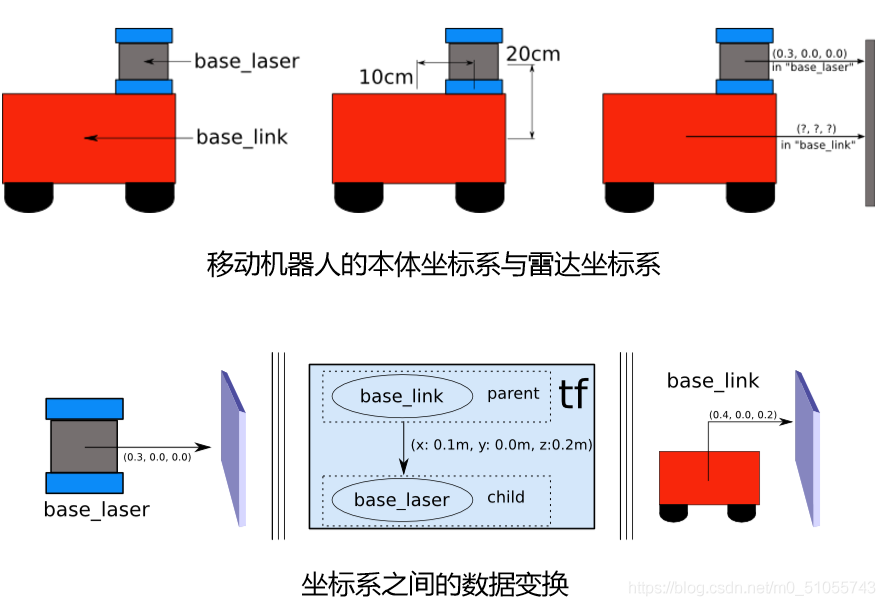
机器人中的坐标变换
sudo apt-get install ros-noetic-turtle-tf
roslaunch turtle_tf turtle_tf_demo.launch
rosrun turtlesim turtle_teleop_key
rosrun tf view_frames
- 运行
roslaunch turtle_tf turtle_tf_demo.launch时有一个错误:
ImportError: No module name rospkg
之前编译python文件的时候,也有类似报错ImportError: No module name rospkg,大概编译时产生错误大概是因为python解释器还是默认为python2
解决:
进入usr.bin目录
cd /usr/bin/
删除原默认编译器文件
rm -r python
复制python3编译器设置为原编译器文件
cp python3 python
最后,便成功地产生了2个海龟
一个海龟跟着另一个海龟
- 可视化小工具
再运行rosrun tf view_frames
TypeError: cannot use a string pattern on a bytes-like object文件夹
解决:把89行改成:m = r.search(str(vstr))
成功了:在当前终端下生成PDF
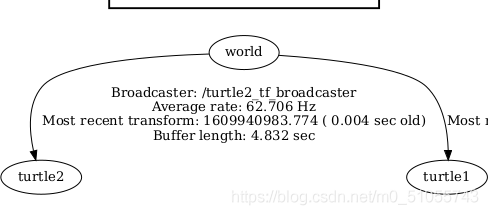
三个坐标系:world全局坐标系,坐标原点;turtle1,turtle2,位于2个海龟上,turtle1、turtle2,不断重合
- 查询在树当中,任意两坐标系之间的关系
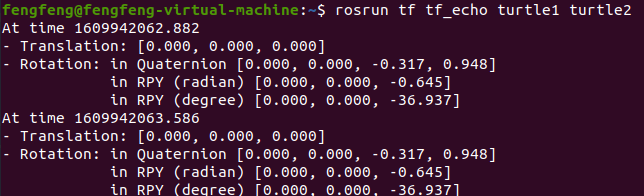
键盘使海龟动,数据不断刷新
- 可视化工具
rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
FixedFrame改为world
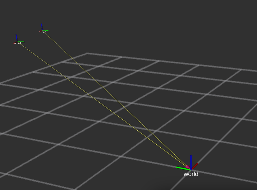
add->TF:显示位置关系
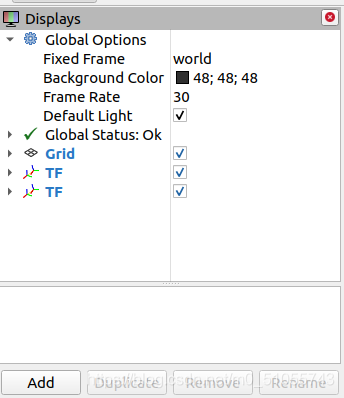
键盘使海龟移动
𝑇𝑡𝑢𝑟𝑡𝑙𝑒1_𝑡𝑢𝑟𝑡𝑙𝑒2 = 𝑇𝑡𝑢𝑟𝑡𝑙𝑒1_𝑤𝑜𝑟𝑙𝑑 ∗ 𝑇𝑤𝑜𝑟𝑙𝑑_𝑡𝑢𝑟𝑡𝑙𝑒2
版权声明:本文为m0_51055743原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。