为什么需要九点标定?
为了得到机械和相机的关系,就好比人的手和眼的关系。我们用手将一个物体放到空间的一个位置,用眼看到这个物体,这也存在两个坐标系,一个是手所在的运动空间的坐标系,一个是视网膜上成像的二维平面坐标系。我们用眼看到一个物体,用手去拿,之所以能够准确地拿到这个物体,是因为我们的神经系统把这两个坐标系准确地关联好了。机械和视觉系统也是这样,相机对工作空间中的物体进行拍照,机械手要想准确地取到这个物体,就必须首先把机械坐标系和视觉坐标系进行准确地关联。
九点标定的基本原理:
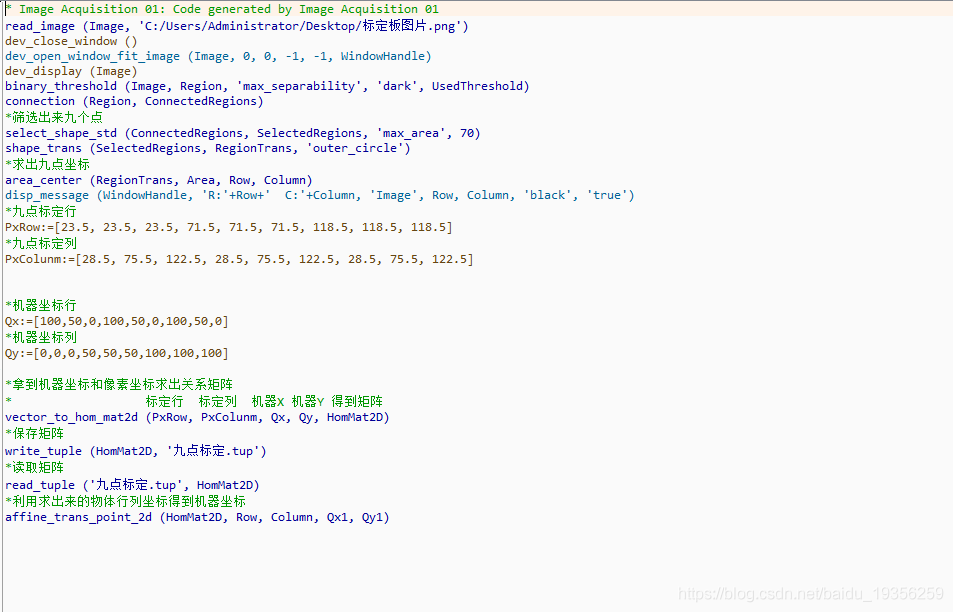
使用机械手将物体放在工作空间中的9个位置,分别用相机进行拍照,取得9个点的机械坐标和像素坐标,然后用Halcon提供的求得仿射矩阵HomMat2D
眼在外:相机放置一个固定的位置,与机器人基坐标系相对位置不变
眼在手:相机和机器手绑定在一个位置,机器手移动,相机也跟着移动
一、眼在手外
二、眼在手上

版权声明:本文为baidu_19356259原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。