UR3机械臂运动学反解之解析解
基于Qt+OpenGL的UR3机械臂仿真与控制系统(四)
反解演示
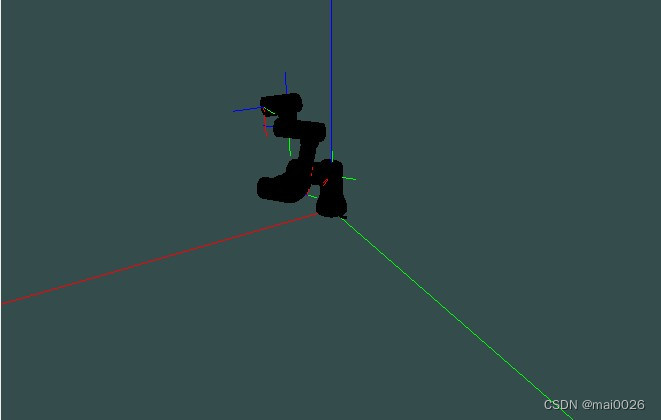

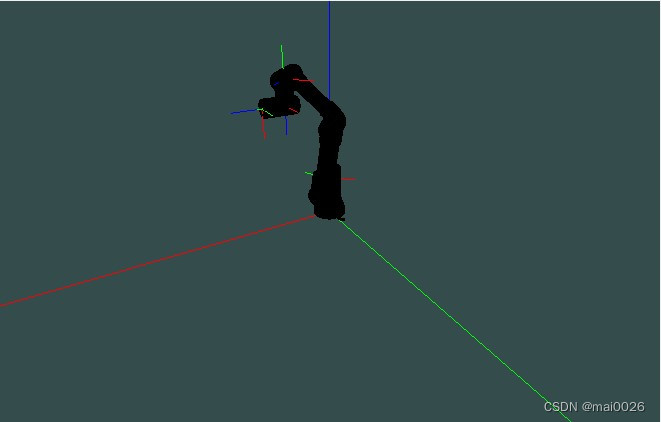
上面三个图片分别是UR3机械臂的逆运动学演示图片
先给定UR3机器人末端固定位置(x=250,y=0,z=450) 与固定姿态(先沿y轴转90°再沿z轴转90°),求解机械臂反解(多解),再将机械臂设置为其中三个解的位置的情况。由此验证反解的正确性。
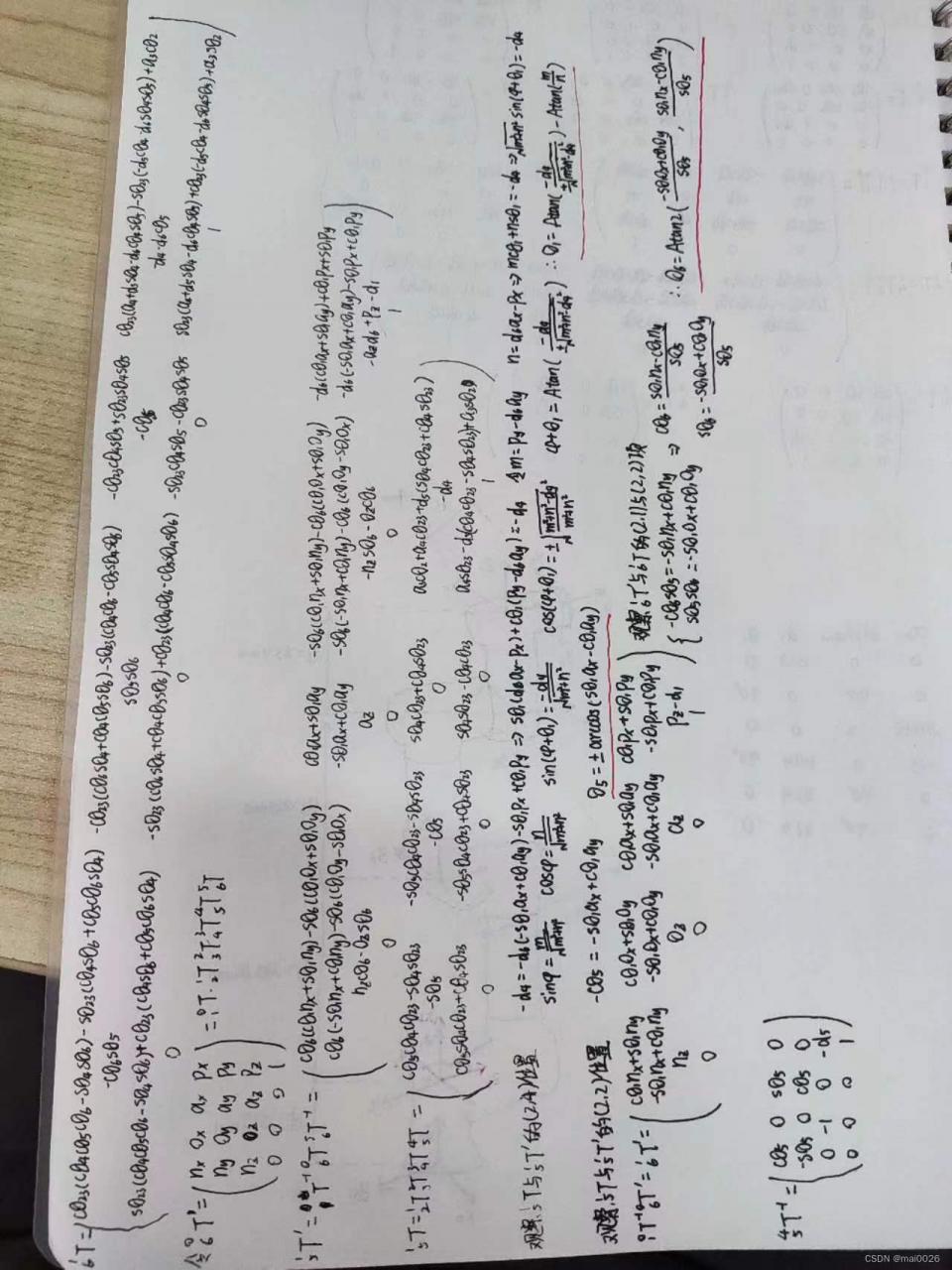
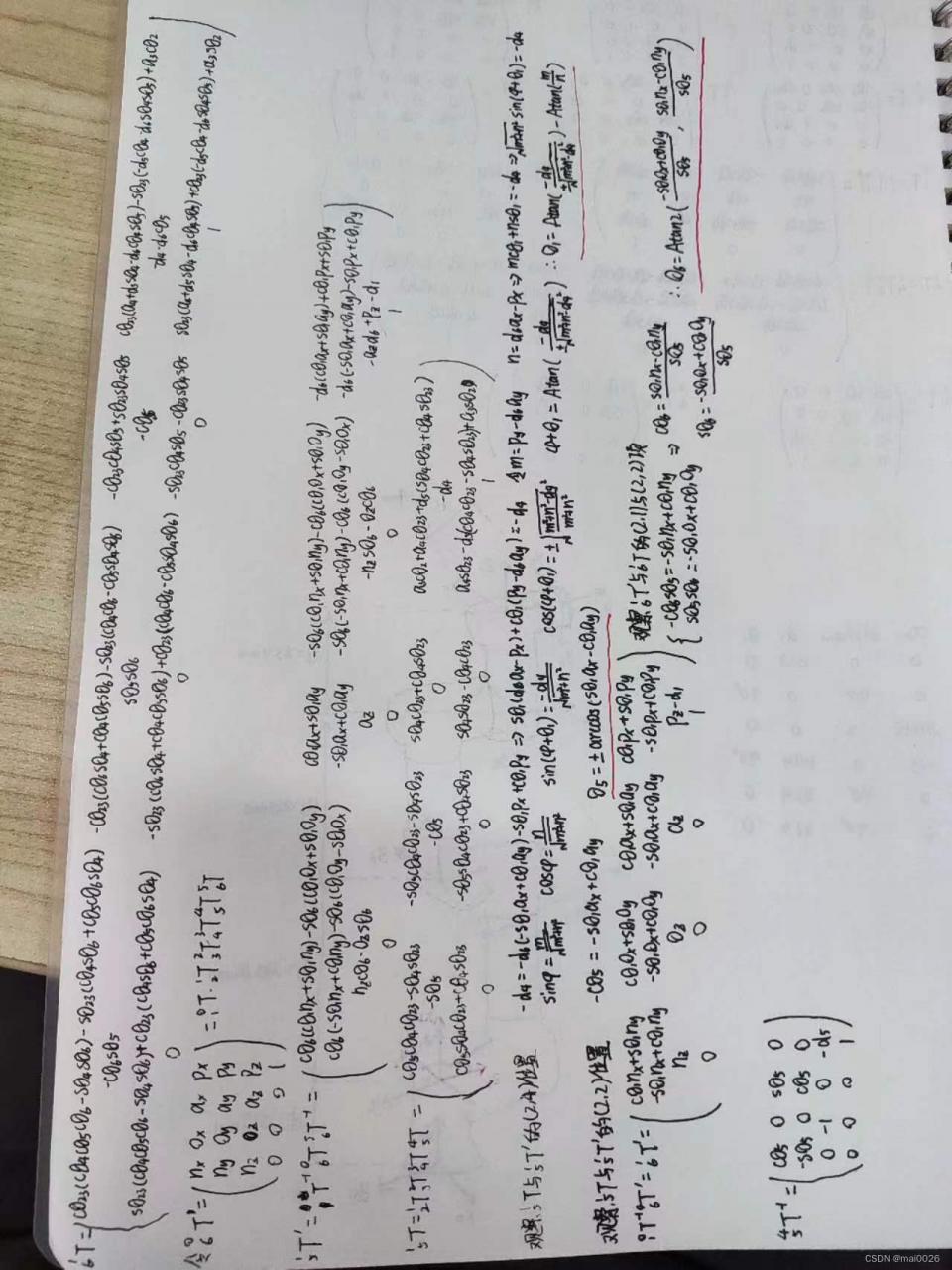
解析解推导

建立的DH参数如上图
C++解析解代码
ur3_controller.h
#ifndef UR3_CONTROLLER_H
#define UR3_CONTROLLER_H
#include <Eigen/Dense>
#include <QWidget>
#include <iostream>
#define PI acos(-1)
class UR3_CONTROLLER{
public:
std::vector<double> thetax_;
std::vector<double> theta_record_; //用了记录上一组角度,做动画插值
std::vector<double> dx_;
std::vector<double> ax_;
std::vector<double> alphax_;
Eigen::Matrix4d T_;
std::vector<std::vector<double>> result_;
double nx;double ox;double ax;double px;
double ny;double oy;double ay;double py;
double nz;double oz;double az;double pz;
void initDH();
void initDH(std::vector<float> a,
std::vector<float> d,
std::vector<float> alpha);
void printfDH();
void setTheta(double theta1,double theta2,
double theta3,double theta4,
double theta5,double theta6);
void setTheta(std::vector<double> thetas);
void setAngle(std::vector<float> angles);
void setT(Eigen::Matrix4d T);
Eigen::Matrix4d getTx(double a,double alpha,double d,double theta);
void positiveKinematics(); //正运动学
Eigen::Matrix4d positiveKinematicsMat(std::vector<double> angle);
std::vector<double> getTheta3(double theta1,double theta5,double theta6);
double getTheta2(double theta1,double theta3,double theta6);
double getTheta4(double theta1,double theta2,double theta3,double theta6);
void negitiveKinematics(); //逆运动学
void filterSlove(bool positive); //挑选正确的解
};
#endif // UR3_CONTROLLER_H
ur3_controller.cpp
#include "./ur3_controller.h"
#include <QDebug>
void UR3_CONTROLLER::initDH(){
//初始化DH参数列表
dx_.push_back(151.9);
dx_.push_back(0);
dx_.push_back(0);
dx_.push_back(110.4);
dx_.push_back(83.4);
dx_.push_back(81.4);
ax_.push_back(0);
ax_.push_back(0);
ax_.push_back(243.65);
ax_.push_back(213);
ax_.push_back(0);
ax_.push_back(0);
alphax_.push_back(0);
alphax_.push_back(PI/2);
alphax_.push_back(0);
alphax_.push_back(0);
alphax_.push_back(PI/2);
alphax_.push_back(-PI/2);
printfDH();
}
void UR3_CONTROLLER::initDH(std::vector<float> a,
std::vector<float> d,
std::vector<float> alpha){
//初始化DH参数列表
for (int i=0;i<a.size();i++){
ax_.push_back(a[i]*1000);
dx_.push_back(d[i]*1000);
alphax_.push_back(alpha[i]*PI/180);
}
printfDH();
}
void UR3_CONTROLLER::printfDH(){
std::cout<<std::endl;
std::cout<<"-------DH参数列表加载成功-------"<<std::endl;
for(int i=0;i<ax_.size();i++){
std::cout<<"d"<<i<<":"<<dx_[i]<<" a"<<i<<":"<<ax_[i]
<<" alpha"<<i<<":"<<alphax_[i];
if (i != ax_.size()-1)
std::cout<<std::endl;
}
std::cout<<std::endl;
std::cout<<"------------------------------"<<std::endl;
std::cout<<std::endl;
}
void UR3_CONTROLLER::setTheta(double theta1,double theta2,
double theta3,double theta4,
double theta5,double theta6){
if (thetax_.size()!=6){
thetax_.clear();
thetax_.push_back(theta1);
thetax_.push_back(theta2);
thetax_.push_back(theta3);
thetax_.push_back(theta4);
thetax_.push_back(theta5);
thetax_.push_back(theta6);
}
else{
thetax_[0] = theta1;
thetax_[1] = theta2;
thetax_[2] = theta3;
thetax_[3] = theta4;
thetax_[4] = theta5;
thetax_[5] = theta6;
}
}
void UR3_CONTROLLER::setTheta(std::vector<double> thetas){
thetax_.clear();
for (int i=0;i<thetas.size();i++)
thetax_.push_back(thetas[i]);
}
void UR3_CONTROLLER::setAngle(std::vector<float> angles){
thetax_.clear();
for (int i=0;i<angles.size();i++)
thetax_.push_back(angles[i]*PI/180);
}
Eigen::Matrix4d UR3_CONTROLLER::getTx(double a,double alpha,double d,double theta){
Eigen::Matrix4d Tx;
double T11 = cos(theta);
double T12 = -1*sin(theta);
double T14 = a;
double T21 = sin(theta)*cos(alpha);
double T22 = cos(theta)*cos(alpha);
double T23 = -1*sin(alpha);
double T24 = -1*d*sin(alpha);
double T31 = sin(theta)*sin(alpha);
double T32 = cos(theta)*sin(alpha);
double T33 = cos(alpha);
double T34 = d*cos(alpha);
Tx << T11 ,T12 ,0 ,T14 ,
T21 ,T22 ,T23 ,T24 ,
T31 ,T32 ,T33 ,T34 ,
0 , 0 , 0 , 1;
Eigen::Matrix4d mat1;
mat1<<1,0,0,a,
0,cos(alpha),-1*sin(alpha),0,
0,sin(alpha),cos(alpha),0,
0,0,0,1;
Eigen::Matrix4d mat2;
mat2<<cos(theta),-1*sin(theta),0,0,
sin(theta),cos(theta),0,0,
0,0,1,d,
0,0,0,1;
return mat1*mat2;
}
void UR3_CONTROLLER::setT(Eigen::Matrix4d T){
T_ = T;
nx = T_(0,0);ox = T_(0,1);ax = T_(0,2);px = T_(0,3);
ny = T_(1,0);oy = T_(1,1);ay = T_(1,2);py = T_(1,3);
nz = T_(2,0);oz = T_(2,1);az = T_(2,2);pz = T_(2,3);
}
//正运动学
void UR3_CONTROLLER::positiveKinematics(){
Eigen::Matrix4d T10 = getTx(ax_[0],alphax_[0],dx_[0],thetax_[0]);
Eigen::Matrix4d T21 = getTx(ax_[1],alphax_[1],dx_[1],thetax_[1]);
Eigen::Matrix4d T32 = getTx(ax_[2],alphax_[2],dx_[2],thetax_[2]);
Eigen::Matrix4d T43 = getTx(ax_[3],alphax_[3],dx_[3],thetax_[3]);
Eigen::Matrix4d T54 = getTx(ax_[4],alphax_[4],dx_[4],thetax_[4]);
Eigen::Matrix4d T65 = getTx(ax_[5],alphax_[5],dx_[5],thetax_[5]);
T_ = T10*T21*T32*T43*T54*T65;
nx = T_(0,0);ox = T_(0,1);ax = T_(0,2);px = T_(0,3);
ny = T_(1,0);oy = T_(1,1);ay = T_(1,2);py = T_(1,3);
nz = T_(2,0);oz = T_(2,1);az = T_(2,2);pz = T_(2,3);
//std::cout<<"正运动学解:"<<T_<<std::endl;
}
//逆运动学
void UR3_CONTROLLER::negitiveKinematics(){
result_.clear();
//求解theta1
double m = py-dx_[5]*ay;
double n = dx_[5]*ax-px;
double phi = atan2(m,n);
double theta11 = std::atan2(-1*dx_[3],sqrt(m*m+n*n-dx_[3]*dx_[3]))-phi;
double theta12 = std::atan2(-1*dx_[3],-1*sqrt(m*m+n*n-dx_[3]*dx_[3]))-phi;
if (theta11<-1*PI){
theta11 = theta11+2*PI;
}
else if(theta11>PI){
theta11 = theta11-2*PI;
}
if (theta12<-1*PI){
theta12 = theta12+2*PI;
}
else if (theta12>PI){
theta12 = theta12-2*PI;
}
double angle11 = theta11*180/PI;
double angle12 = theta12*180/PI;
// std::cout<<"angle11:"<<angle11<<std::endl;
// std::cout<<"angle12:"<<angle12<<std::endl;
//求解theta5,一个theta1对应两个theta5
double theta51 = acos(sin(theta11)*ax-cos(theta11)*ay);
double theta52 = -1*acos(sin(theta11)*ax-cos(theta11)*ay);
double theta53 = acos(sin(theta12)*ax-cos(theta12)*ay);
double theta54 = -1*acos(sin(theta12)*ax-cos(theta12)*ay);
double angle51 = theta51*180/PI;
double angle52 = theta52*180/PI;
double angle53 = theta53*180/PI;
double angle54 = theta54*180/PI;
// std::cout<<"angle51:"<<angle51<<std::endl;
// std::cout<<"angle52:"<<angle52<<std::endl;
// std::cout<<"angle53:"<<angle53<<std::endl;
// std::cout<<"angle54:"<<angle54<<std::endl;
//求解theta6,一个theta1对应一个theta6,由atan()计算所得的角都应该注意值域的问题
double theta61,theta62,theta63,theta64;
double fenzi1 = (-1*sin(theta11)*ox+cos(theta11)*oy)/sin(theta51);
double fenmu1 = (sin(theta11)*nx-cos(theta11)*ny)/(sin(theta51));
// std::cout<<"fenzi1:"<<fenzi1<<std::endl;
// std::cout<<"fenmu1:"<<fenmu1<<std::endl;
theta61 = std::atan2(fenzi1,fenmu1);
double fenzi2 = (-1*sin(theta11)*ox+cos(theta11)*oy)/sin(theta52);
double fenmu2 = (sin(theta11)*nx-cos(theta11)*ny)/(sin(theta52));
// std::cout<<"fenzi2:"<<fenzi2<<std::endl;
// std::cout<<"fenmu2:"<<fenmu2<<std::endl;
theta62 = std::atan2(fenzi2,fenmu2);
double fenzi3 = (-1*sin(theta12)*ox+cos(theta12)*oy)/sin(theta53);
double fenmu3 = (sin(theta12)*nx-cos(theta12)*ny)/(sin(theta53));
theta63 = std::atan2(fenzi3,fenmu3);
double fenzi4 = (-1*sin(theta12)*ox+cos(theta12)*oy)/sin(theta54);
double fenmu4 = (sin(theta12)*nx-cos(theta12)*ny)/(sin(theta54));
theta64 = std::atan2(fenzi4,fenmu4);
double angle61 = theta61*180/PI;
double angle62 = theta62*180/PI;
double angle63 = theta63*180/PI;
double angle64 = theta64*180/PI;
// std::cout<<"angle61:"<<angle61<<std::endl;
// std::cout<<"angle62:"<<angle62<<std::endl;
// std::cout<<"angle63:"<<angle63<<std::endl;
// std::cout<<"angle64:"<<angle64<<std::endl;
//求解theta3
std::vector<double> theta3; //中间变量暂存返回结果
theta3 = getTheta3(theta11,theta51,theta61);
double theta31 = theta3[0];
double theta32 = theta3[1];
double angle31 = theta31*180/PI;
double angle32 = theta32*180/PI;
theta3 = getTheta3(theta11,theta52,theta62);
double theta33 = theta3[0];
double theta34 = theta3[1];
double angle33 = theta33*180/PI;
double angle34 = theta34*180/PI;
theta3 = getTheta3(theta12,theta53,theta63);
double theta35 = theta3[0];
double theta36 = theta3[1];
double angle35 = theta35*180/PI;
double angle36 = theta36*180/PI;
theta3 = getTheta3(theta12,theta54,theta64);
double theta37 = theta3[0];
double theta38 = theta3[1];
double angle37 = theta37*180/PI;
double angle38 = theta38*180/PI;
// std::cout<<"angle31:"<<angle31<<std::endl;
// std::cout<<"angle32:"<<angle32<<std::endl;
// std::cout<<"angle33:"<<angle33<<std::endl;
// std::cout<<"angle34:"<<angle34<<std::endl;
// std::cout<<"angle35:"<<angle35<<std::endl;
// std::cout<<"angle36:"<<angle36<<std::endl;
// std::cout<<"angle37:"<<angle37<<std::endl;
// std::cout<<"angle38:"<<angle38<<std::endl;
//求解theta2
double theta21 = getTheta2(theta11,theta31,theta61);
double theta22 = getTheta2(theta11,theta32,theta61);
double theta23 = getTheta2(theta11,theta33,theta62);
double theta24 = getTheta2(theta11,theta34,theta62);
double theta25 = getTheta2(theta12,theta35,theta63);
double theta26 = getTheta2(theta12,theta36,theta63);
double theta27 = getTheta2(theta12,theta37,theta64);
double theta28 = getTheta2(theta12,theta38,theta64);
double angle21 = theta21*180/PI;
double angle22 = theta22*180/PI;
double angle23 = theta23*180/PI;
double angle24 = theta24*180/PI;
double angle25 = theta25*180/PI;
double angle26 = theta26*180/PI;
double angle27 = theta27*180/PI;
double angle28 = theta28*180/PI;
// std::cout<<"angle21:"<<angle21<<std::endl;
// std::cout<<"angle22:"<<angle22<<std::endl;
// std::cout<<"angle23:"<<angle23<<std::endl;
// std::cout<<"angle24:"<<angle24<<std::endl;
// std::cout<<"angle25:"<<angle25<<std::endl;
// std::cout<<"angle26:"<<angle26<<std::endl;
// std::cout<<"angle27:"<<angle27<<std::endl;
// std::cout<<"angle28:"<<angle28<<std::endl;
//求解theta4
double theta41 = getTheta4(theta11,theta21,theta31,theta61);
double theta42 = getTheta4(theta11,theta22,theta32,theta61);
double theta43 = getTheta4(theta11,theta23,theta33,theta62);
double theta44 = getTheta4(theta11,theta24,theta34,theta62);
double theta45 = getTheta4(theta12,theta25,theta35,theta63);
double theta46 = getTheta4(theta12,theta26,theta36,theta63);
double theta47 = getTheta4(theta12,theta27,theta37,theta64);
double theta48 = getTheta4(theta12,theta28,theta38,theta64);
double angle41 = theta41*180/PI;
double angle42 = theta42*180/PI;
double angle43 = theta43*180/PI;
double angle44 = theta44*180/PI;
double angle45 = theta45*180/PI;
double angle46 = theta46*180/PI;
double angle47 = theta47*180/PI;
double angle48 = theta48*180/PI;
// std::cout<<"angle41:"<<angle41<<std::endl;
// std::cout<<"angle42:"<<angle42<<std::endl;
// std::cout<<"angle43:"<<angle43<<std::endl;
// std::cout<<"angle44:"<<angle44<<std::endl;
// std::cout<<"angle45:"<<angle45<<std::endl;
// std::cout<<"angle46:"<<angle46<<std::endl;
// std::cout<<"angle47:"<<angle47<<std::endl;
// std::cout<<"angle48:"<<angle48<<std::endl;
//压入结果容器
result_.clear();
std::vector<double> middle_result;
middle_result.push_back(angle11);middle_result.push_back(angle21);middle_result.push_back(angle31);
middle_result.push_back(angle41);middle_result.push_back(angle51);middle_result.push_back(angle61);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle11);middle_result.push_back(angle22);middle_result.push_back(angle32);
middle_result.push_back(angle42);middle_result.push_back(angle51);middle_result.push_back(angle61);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle11);middle_result.push_back(angle23);middle_result.push_back(angle33);
middle_result.push_back(angle43);middle_result.push_back(angle52);middle_result.push_back(angle62);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle11);middle_result.push_back(angle24);middle_result.push_back(angle34);
middle_result.push_back(angle44);middle_result.push_back(angle52);middle_result.push_back(angle62);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle12);middle_result.push_back(angle25);middle_result.push_back(angle35);
middle_result.push_back(angle45);middle_result.push_back(angle53);middle_result.push_back(angle63);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle12);middle_result.push_back(angle26);middle_result.push_back(angle36);
middle_result.push_back(angle46);middle_result.push_back(angle53);middle_result.push_back(angle63);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle12);middle_result.push_back(angle27);middle_result.push_back(angle37);
middle_result.push_back(angle47);middle_result.push_back(angle54);middle_result.push_back(angle64);
result_.push_back(middle_result);
middle_result.clear();
middle_result.push_back(angle12);middle_result.push_back(angle28);middle_result.push_back(angle38);
middle_result.push_back(angle48);middle_result.push_back(angle54);middle_result.push_back(angle64);
result_.push_back(middle_result);
middle_result.clear();
//输出结果(可能含有不正确的解)
for (int i=0;i<result_.size();i++){
std::cout<<"第"<<i<<"组解:";
for (int j=0;j<result_[i].size();j++){
std::cout<<" "<<result_[i][j];
}
std::cout<<std::endl;
}
std::cout<<std::endl;
}
//求解theta3
std::vector<double> UR3_CONTROLLER::getTheta3(double theta1,double theta5,double theta6){
std::vector<double> theta3; // 存放运算结果
double a = dx_[4]*(sin(theta6)*(cos(theta1)*nx+sin(theta1)*ny)+cos(theta6)*(cos(theta1)*ox+sin(theta1)*oy))-dx_[5]*(cos(theta1)*ax+sin(theta1)*ay)+cos(theta1)*px+sin(theta1)*py;
double b = dx_[4]*(sin(theta6)*nz+cos(theta6)*oz)-dx_[5]*az+pz-dx_[0];
double fenzi = (a*a+b*b-ax_[3]*ax_[3]-ax_[2]*ax_[2]);
double fenmu = (2*ax_[2]*ax_[3]);
//std::cout<<"fenzi2:"<<fenzi2/fenmu2<<std::endl;
double theta31 = acos(fenzi/fenmu);
double theta32 = -1*acos(fenzi/fenmu);
theta3.clear();
theta3.push_back(theta31);
theta3.push_back(theta32);
return theta3;
}
//求解theta2
double UR3_CONTROLLER::getTheta2(double theta1,double theta3,double theta6){
double a = dx_[4]*(sin(theta6)*(cos(theta1)*nx+sin(theta1)*ny)+cos(theta6)*(cos(theta1)*ox+sin(theta1)*oy))-dx_[5]*(cos(theta1)*ax+sin(theta1)*ay)+cos(theta1)*px+sin(theta1)*py;
double b = dx_[4]*(sin(theta6)*nz+cos(theta6)*oz)-dx_[5]*az+pz-dx_[0];
double fenzi = (b*(ax_[3]*cos(theta3)+ax_[2])-ax_[3]*sin(theta3)*a)/(ax_[2]*ax_[2]+ax_[3]*ax_[3]+2*ax_[2]*ax_[3]*cos(theta3));
double fenmu = (a*(ax_[3]*cos(theta3)+ax_[2])+ax_[3]*sin(theta3)*b)/(ax_[2]*ax_[2]+ax_[3]*ax_[3]+2*ax_[2]*ax_[3]*cos(theta3));
double theta2 = std::atan2(fenzi,fenmu);
return theta2;
}
//求解theta4
double UR3_CONTROLLER::getTheta4(double theta1,double theta2,double theta3,double theta6){
double nx = T_(0,0);double ny = T_(1,0);double nz = T_(2,0);
double ox = T_(0,1);double oy = T_(1,1);double oz = T_(2,1);
double fenzi = -1*sin(theta6)*(cos(theta1)*nx+sin(theta1)*ny)-cos(theta6)*(cos(theta1)*ox+sin(theta1)*oy);
double fenmu = nz*sin(theta6)+oz*cos(theta6);
//因为atan(x)所求的结果落在-PI/2到PI/2上,theta2+theta3+theta4显然不一定落在此区域上
double theta234;
if ((fenzi>0 && fenmu<0)){
theta234 = PI+atan(fenzi/fenmu);
}
else if (fenzi<0 && fenmu<0){
theta234 = atan(fenzi/fenmu)-PI;
}
else{
theta234 = atan(fenzi/fenmu);
}
//因为theta2+theta3+theta4的取值范围可以到[-540,540] (该范围可以在后期传入范围参数确定)
double theta4;
//尝试覆盖[-540,540]所有theta2+theta3+theta4的可能性
if (2*PI+theta234-theta2-theta3<PI && 2*PI+theta234>-1*PI){
theta4 = theta234+2*PI-theta2-theta3;
}
else if (-2*PI+theta234-theta2-theta3<PI && -2*PI+theta234>-1*PI){
theta4 = theta234-2*PI-theta2-theta3;
}
else
theta4 = theta234-theta2-theta3;
return theta4;
}
Eigen::Matrix4d UR3_CONTROLLER::positiveKinematicsMat(std::vector<double> angle){
double theta1 = angle[0]*PI/180;
double theta2 = angle[1]*PI/180;
double theta3 = angle[2]*PI/180;
double theta4 = angle[3]*PI/180;
double theta5 = angle[4]*PI/180;
double theta6 = angle[5]*PI/180;
Eigen::Matrix4d T10 = getTx(ax_[0],alphax_[0],dx_[0],theta1);
Eigen::Matrix4d T21 = getTx(ax_[1],alphax_[1],dx_[1],theta2);
Eigen::Matrix4d T32 = getTx(ax_[2],alphax_[2],dx_[2],theta3);
Eigen::Matrix4d T43 = getTx(ax_[3],alphax_[3],dx_[3],theta4);
Eigen::Matrix4d T54 = getTx(ax_[4],alphax_[4],dx_[4],theta5);
Eigen::Matrix4d T65 = getTx(ax_[5],alphax_[5],dx_[5],theta6);
return T10*T21*T32*T43*T54*T65;
}
void UR3_CONTROLLER::filterSlove(bool positive){
if (positive == false){//如果是逆运动学
std::vector<std::vector<double>> right_result;
for (int i=0;i<result_.size();i++){
bool status = true;
for (int j=0;j<result_[i].size();j++){ //检查每个元素的取值
if (status == false)
break;
if (result_[i][j]<180&&result_[i][j]>-1*180){
}
else{
status = false;
}
}
if (status == true){
right_result.push_back(result_[i]);
}
}
result_.clear();
result_ = right_result;
}
else{ //如果是正运动学
std::vector<std::vector<double>> right_result;
std::cout<<"输出矩阵查看问题:"<<T_<<std::endl;
for (int i=0;i<result_.size();i++){
Eigen::Matrix4d T = positiveKinematicsMat(result_[i]);
std::cout<<"对比矩阵:"<<T<<std::endl;
//计算两矩阵偏差
double dv = pow(T(0,0)-T_(0,0),2)+pow(T(0,1)-T_(0,1),2)+pow(T(0,2)-T_(0,2),2)+pow(T(0,3)-T_(0,3),2)
+pow(T(1,0)-T_(1,0),2)+pow(T(1,1)-T_(1,1),2)+pow(T(1,2)-T_(1,2),2)+pow(T(1,3)-T_(1,3),2)
+pow(T(2,0)-T_(2,0),2)+pow(T(2,1)-T_(2,1),2)+pow(T(2,2)-T_(2,2),2)+pow(T(2,3)-T_(2,3),2);
if (dv<0.1){
// std::cout<<"第"<<i<<"组解正确"<<std::endl;
right_result.push_back(result_[i]);
}
}
result_.clear();
result_ = right_result;
}
//输出正确结果
for (int i=0;i<result_.size();i++){
std::cout<<"第"<<i<<"组解:";
for (int j=0;j<result_[i].size();j++){
std::cout<<" "<<result_[i][j];
}
std::cout<<std::endl;
}
}
完整代码
版权声明:本文为weixin_43220219原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。