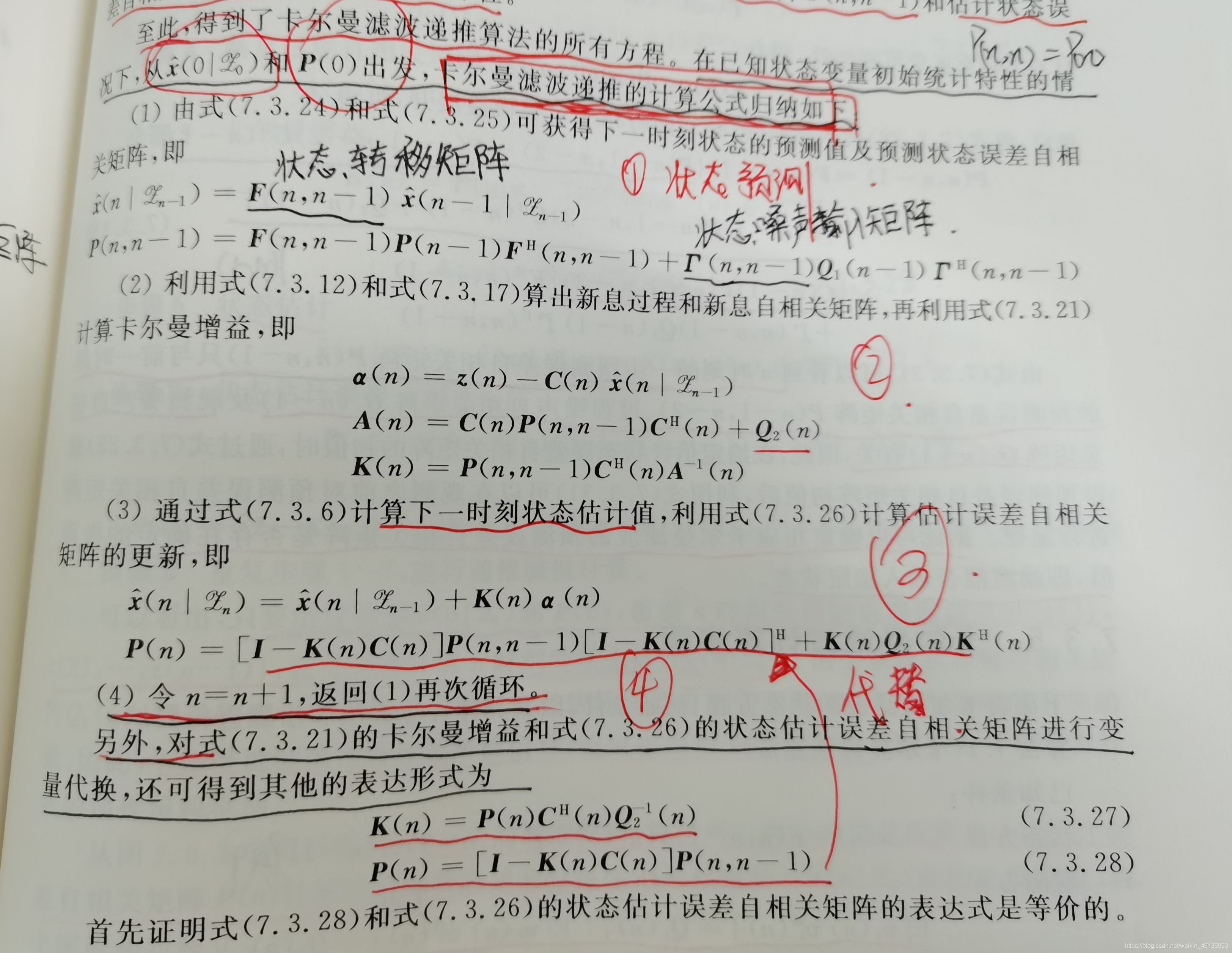
基本原理
教材<现代数字信号处理及其运用> P244-P258

卡尔曼滤波过程

源代码
%---卡尔曼滤波器用在一维温度数据测量中
% 卡尔曼滤波要回答的问题:如何利用系统的观测向量进行滤波处理,得到系统状态向量的估计
clc;
clear all;
close all;
%-------------参数设置
N=200; % 采样点数
T0=25; % 室内温度的期望值
t=1:N; % 持续时间
I=eye(1); % 本系统的状态为一维
%-------------对状态和测量初始化
X_expect=T0*ones(1,N); % 在观察的时间内,期望的温度是恒定不变的25度
X=zeros(1,N); % 房间各个时刻温度的真实值
X_est=zeros(1,N); % 卡尔曼滤波处理的状态,也叫做状态的估计值
X_pre=zeros(1,N); % 状态的预测值
Z=zeros(1,N); % 温度计观测(测量)值
P=zeros(1,N); % 预测误差自相关矩阵
%------------给定初值
X(1)=25.1; % 假设房间的初始温度值为25.1度 相当于教材的X(0)
P(1)=0.01; % 预测误差自相关矩阵的初始值 相当于教材的P(0)
Z(1)=24.9; % 温度计观测的初始值
X_est(1)=Z(1); % 温度计观测的初始值为24.9度,以此作为滤波器的初始估计状态
Q1=0.01; % 系统状态噪声的方差
Q2=0.25; % 观测噪声的方差
v1=sqrt(Q1)*randn(1,N); % 系统状态噪声
v2=sqrt(Q2)*randn(1,N); % 观测噪声
%-----状态方程和观测方程的有关参量,全给1简化问题
F=1; % 状态转移矩阵
T=1; % 状态噪声输入矩阵
C=1; % 观测矩阵
%-------模拟房间温度,并开始卡尔曼滤波过程(根据教材现代数字信号处理及其运用 P255编写)
for m=2:N
% 第一步:随着时间的推移,房间的真实温度波动变化
% m时刻房间的真实温度,for 温度计,这个真实值它是不知道的,但是它又是客观存在的
X(m)=F*X(m-1)+T*v1(m-1); % 状态方程
% 第二步:随着时间的推移,获取实时数据
% 温度计对m时刻房间温度的观测(测量),卡尔曼滤波是站在温度计的角度进行的,
% 它不知道此时的真实状态X_ture(m),只能利用本次的测量值Z(m)和上一次的估计值X_guji(m-1)来做处理
% 其目标是最大限度的降低观测噪声的影响,尽可能的逼近X_ture(m),这也是卡尔曼滤波的目的
Z(m)=C*X(m)+v2(m); % 观测方程
% 第三步:卡尔曼滤波
X_pre=F*X_est(m-1); % 下一时刻状态的预测值
P_pre=F*P(m-1)*F'+T*Q1*T'; % 预测状态误差自相关矩阵
a=Z(m)-C*X_pre; % 新息
A=C*P_pre*C'+Q2; % 新息过程的自相关矩阵
K=P_pre*C'*inv(A); % 计算卡尔曼增益 inv(X)表示计算方阵X的逆矩阵
X_est(m)=X_pre+K*a; % 计算下一时刻状态估计值(状态更新)
% P(m)=(1-K*C)*P_pre; % 计算估计误差自相关矩阵的更新(协方差更新)(7.3.28)
P(m)=(1-K*C)*P_pre*(1-K*C)'+K*Q2*K'; % 计算估计误差自相关矩阵的更新(协方差更新)
end
%-----------------误差计算
Err_messure=zeros(1,N); % 测量值与真实值之间的偏差
Err_kalman=zeros(1,N); % 卡尔曼估计值和真实值之间的误差
for n=1:N
Err_messure(n)=abs(Z(n)-X(n));
Err_kalman(n)=abs(X_est(n)-X(n));
end
%------------------绘图
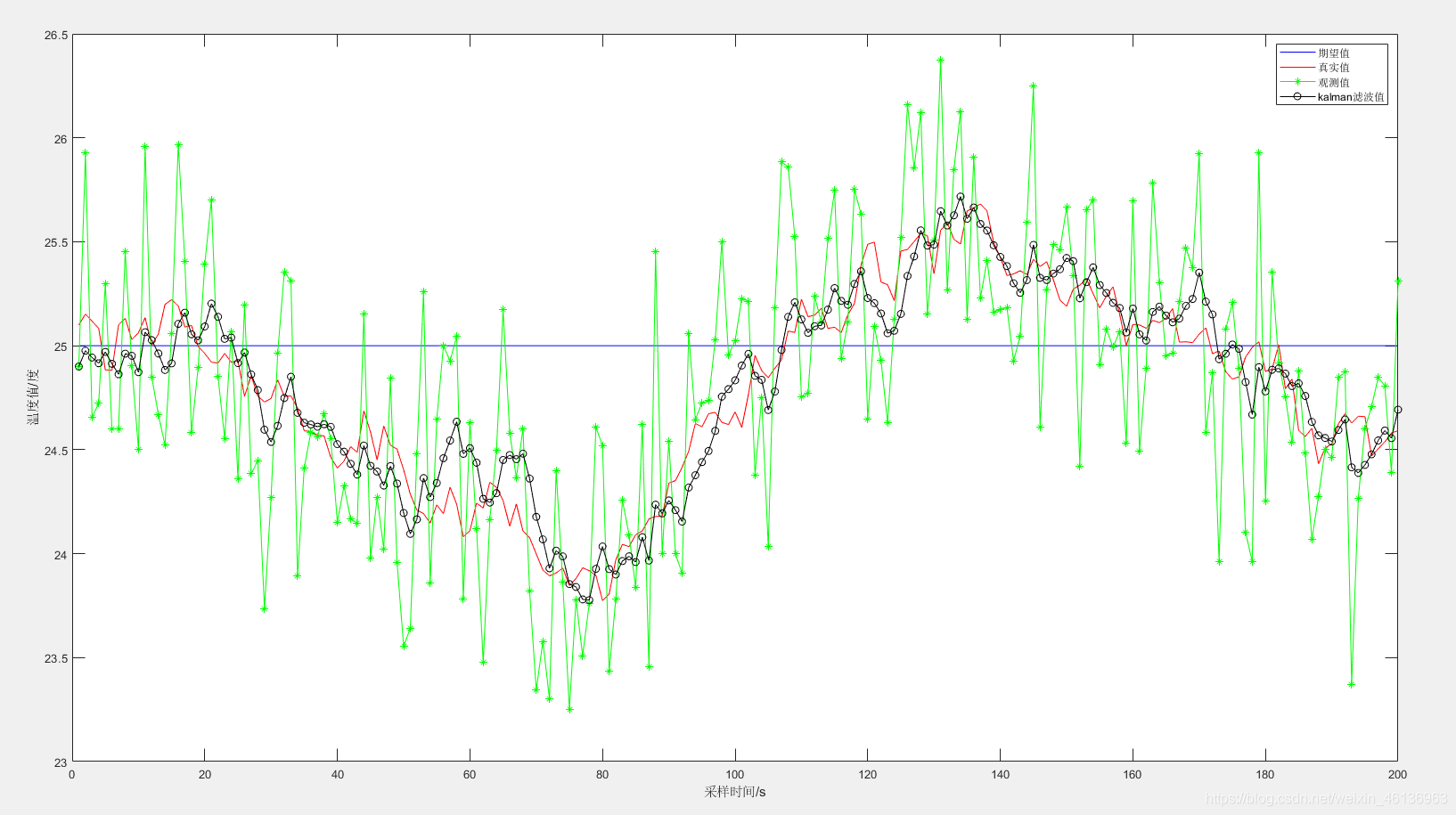
figure(1)
plot(t,X_expect,'-b',t,X,'-r',t,Z,'-g*',t,X_est,'-ko');
legend('期望值','真实值','观测值','kalman滤波值');
xlabel('采样时间/s');
ylabel('温度值/度');
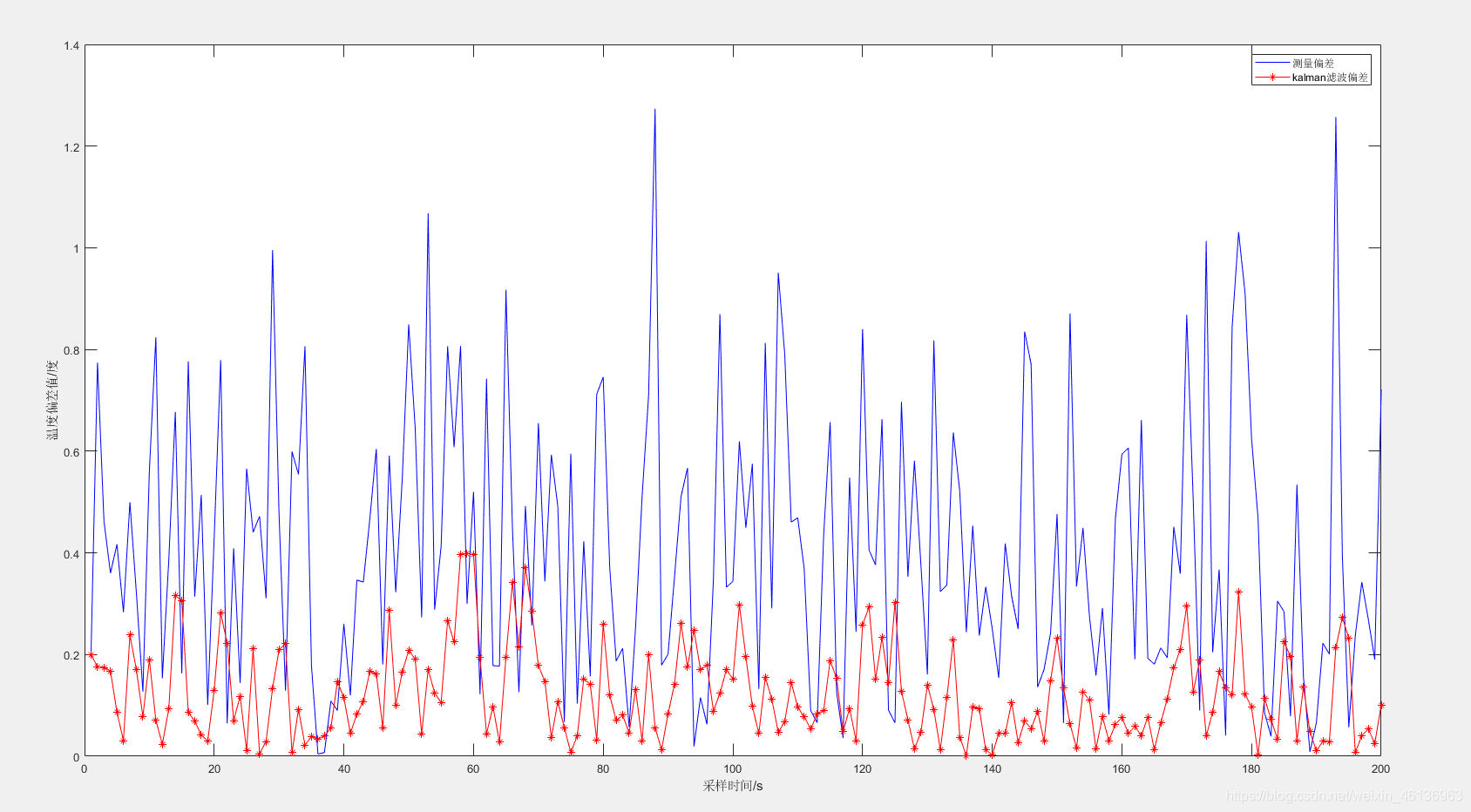
figure(2)
plot(t,Err_messure,'-b',t,Err_kalman,'-r*');
legend('测量偏差','kalman滤波偏差');
xlabel('采样时间/s');
ylabel('温度偏差值/度');
“
仿真结果
版权声明:本文为weixin_46136963原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。