
?作者简介:?
博主在读机器人研究生,目前研一。对计算机后端感兴趣,喜欢c
+
+
,
g
o
,
p
y
t
h
o
n
,
目前熟悉
c
+
+
,
g
o
语言,数据库,网络编程,了解分布式等相关内容
\textcolor{orange}{博主在读机器人研究生,目前研一。对计算机后端感兴趣,喜欢c++,go,python,目前熟悉c++,go语言,数据库,网络编程,了解分布式等相关内容}
博主在读机器人研究生,目前研一。对计算机后端感兴趣,喜欢
c
+
+
,
g
o
,
p
y
t
h
o
n
,
目前熟悉
c
+
+
,
g
o
语言,数据库,网络编程,了解分布式等相关内容
?
个人主页:\textcolor{gray}{个人主页:}
个人主页:
小呆鸟_coding
?
支持:
\textcolor{gray}{支持:}
支持
:
如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦\textcolor{green}{如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦}
如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦
?
就是给予我最大的支持!\textcolor{green}{就是给予我最大的支持!}
就是给予我最大的支持!
?
?本文摘要?
本专栏主要是讲解操作系统的相关知识 本文主要讲解 同步与互斥 文章目录
清华操作系统系列文章:可面试可复习
1. 操作系统—概述
2. 操作系统—中断、异常、系统调用
3. 操作系统—物理内存管理
4. 操作系统—非连续内存分配
5. 虚拟内存管理
6. 操作系统—虚拟内存管理技术页面置换算法
7. 进程管理
8. 调度算法
9. 同步与互斥
10. 信号量和管程
11. 死锁和进程通信
12. 文件系统管理
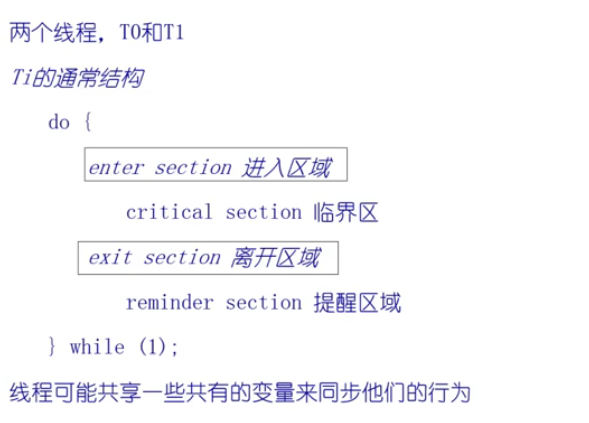
?同步与互斥
?1. 背景
- 一些概念
- 临界区
- 方法1:禁用硬件中断
- 方法2:基于软件的解决方法
- 方法3:更高级的抽象
到目前为止
-
多道程序设计
: 现代操作系统的重要特性 -
并行很有用(为什么?) 提示:
-
多个并发实体: CPU IO 用户 等
-
-
进程,线程
: 操作系统抽象出来用于支持多道程序设计 -
CPU调度
: 实现多道程序设计的机制 -
调度算法: 不同的策略
如果资源处理不当,会发生饥饿和死锁等,出现一系列问题,跟调度有关
独立的线程:
- 不和其他线程共享资源或状态
- 确定性: 输入状态决定结果
- 可重现: 能够重现起始条件, IO
- 调度顺序不重要
合作线程:
- 在多个线程中共享状态
- 不确定性(对于单个进程而言,执行时间不确定,可能会被其他进程抢占)
-
不可重现
不确定性和不可重现意味着bug可能是间歇性发生的
进程,线程;计算机,设备需要合作
合作优点::
优点1:共享资源
- 一台电脑,多个用户
- 一个银行存款余额,多台ATM机
- 嵌入式系统
优点2:加速
- IO操作和计算可以重叠
- 多处理器
优点3:模块化
- 将大程序分解成小程序
- 以编译器为例, gcc会调用cpp,cc1,cc2,as,ld
- 使系统易于扩展
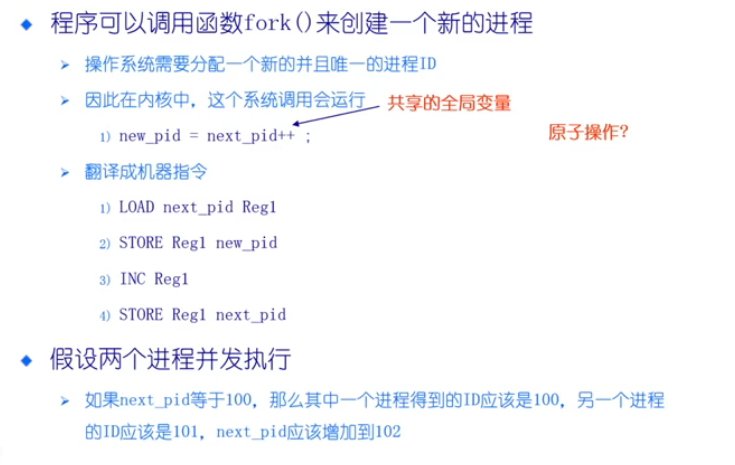
-
将
next_pid
赋给
寄存器1
(将内存中的内容加载到寄存器中) -
store
将寄存器中的内容存到内存中,将
寄存器1
中的内容存到
new_pid
这个里面(此时
new_pid
具有了
next_pid
的值)
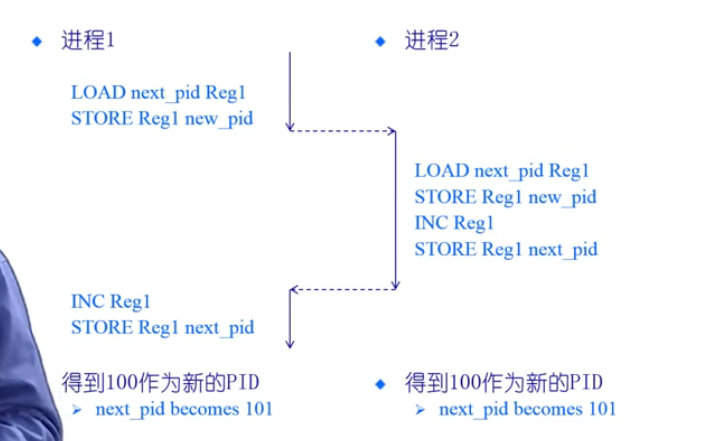
- 进程执行的时候会保存寄存器的值在自己的堆栈里
- 进程切换会把进程的资源保存起来,切回来时,再把资源恢复回去
- 恢复进程1的上下文
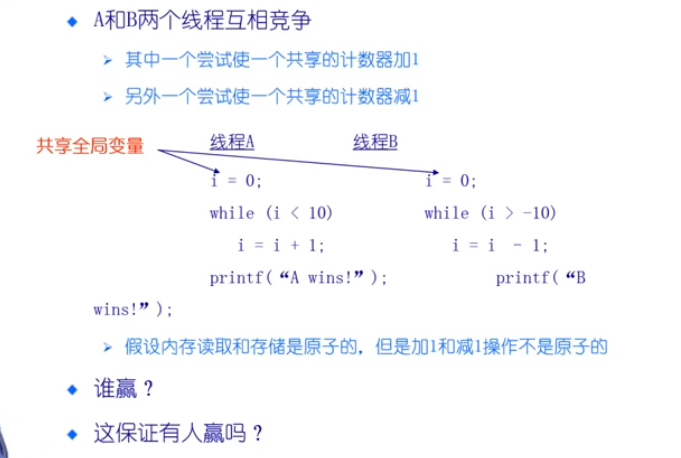
无论多个线程的指令序列怎样交替执行,程序都必须正常工作
- 多线程程序具有不确定性和不可重现的特点
- 不经过专门设计,调试难度很高
不确定性要求并行程序的正确性
- 先思考清楚问题,把程序的行为设计清楚
- 切忌给予着手编写代码,碰到问题再调试
同步互斥就是解决上述不确定,不重现问题
?2. 一些概念(Part 1)
前面的现象称为
Race Condition
(竞态条件)
系统缺陷: 结果依赖于并发执行或者时间的顺序,时间
- 不确定性
- 不可重现
怎么样避免竞态?
- 让指令不被打断
- Atomic Operator(原子操作)
解决办法(原子操作)
-
原子操作是指一次不存在任何终端或者失败的执行
- 该执行成功结束
- 或者根本没有执行
- 并且不应发生任何部分执行的状态
-
实际上操作往往不是原子的
- 有些看上去是原子操作,实际上不是
- 连x++这样的简单语句,实际上是由三条指令构成的
-
有时候甚至连单条假期指令都不是原子的
-
Pipeline,super-scalar,out-of-order,pape fault
-
实例
-
load和store是原子操作,但是++不是原子操作
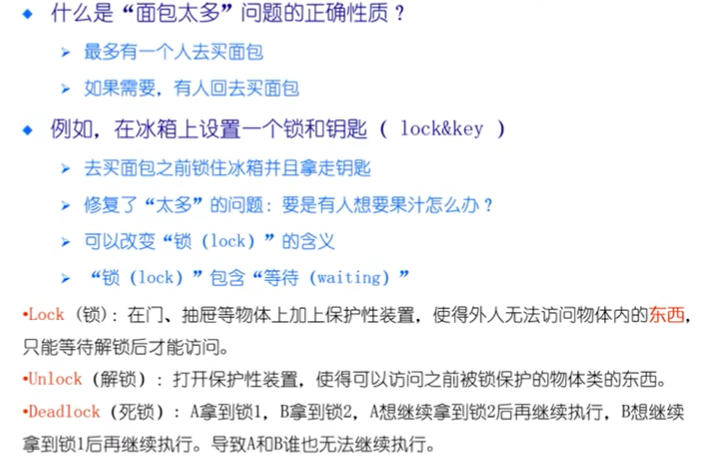
- 死锁:当俩个进程都拥有一定的资源,同时还需要其他共享资源时,俩个进程相互等待,进程A等待进程B的资源,进程B等待进程A的资源
?3. 一些概念(Part 2)
举例
-
交换一下顺序
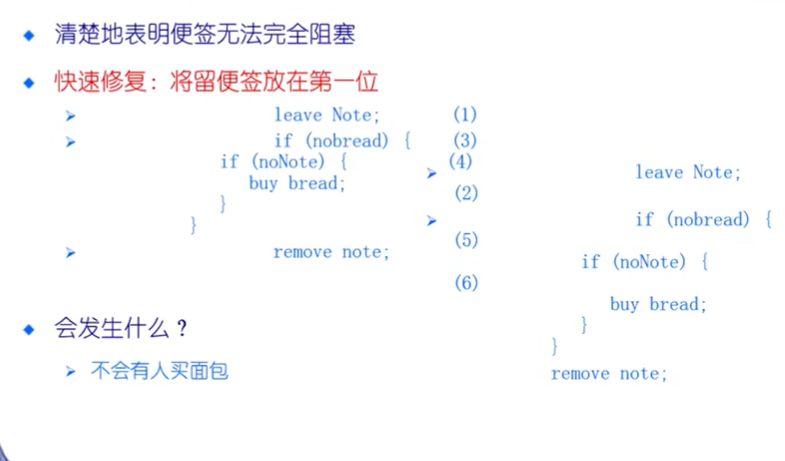
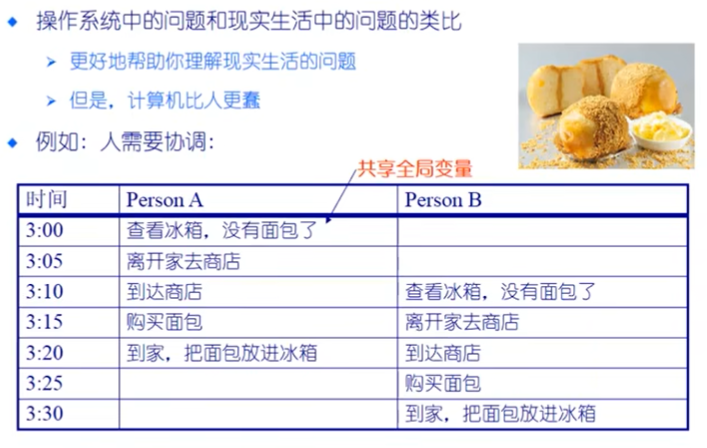
?4. 一些概念(Part 3)
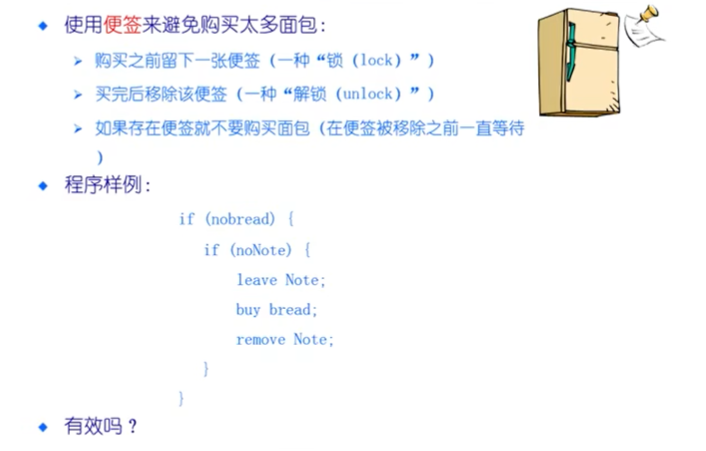
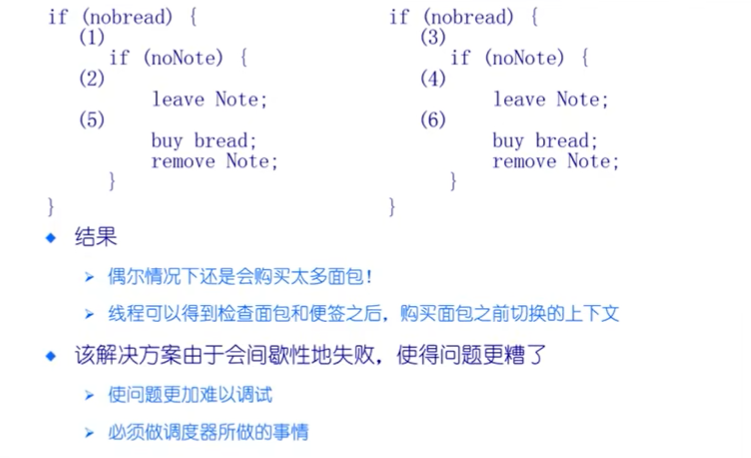
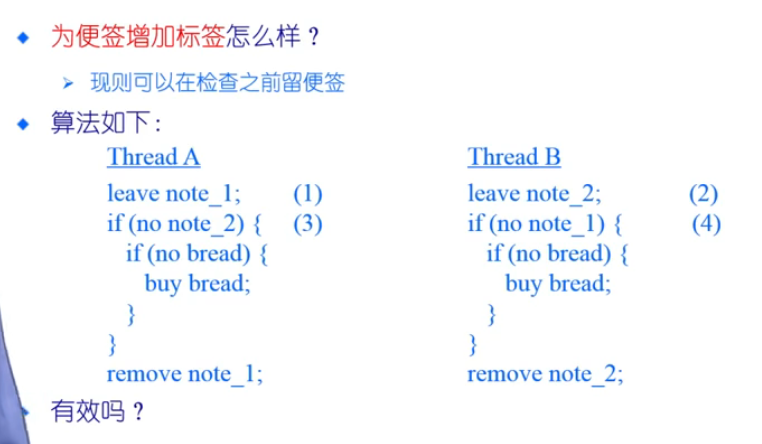
- 为note贴上标签,指定是谁留下的纸条,仍然会出现问题,当进程A留下标签后,切换到进程B,也会留下标签,此时结果就是都没有买面包
设置不同的控制逻辑
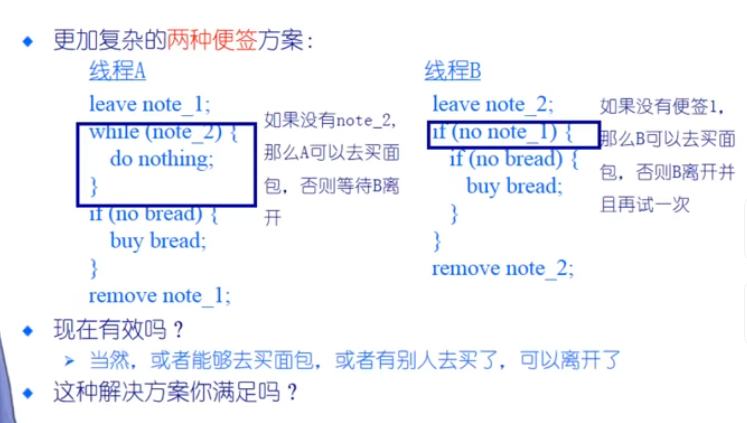
可以解决,但是太复杂
-
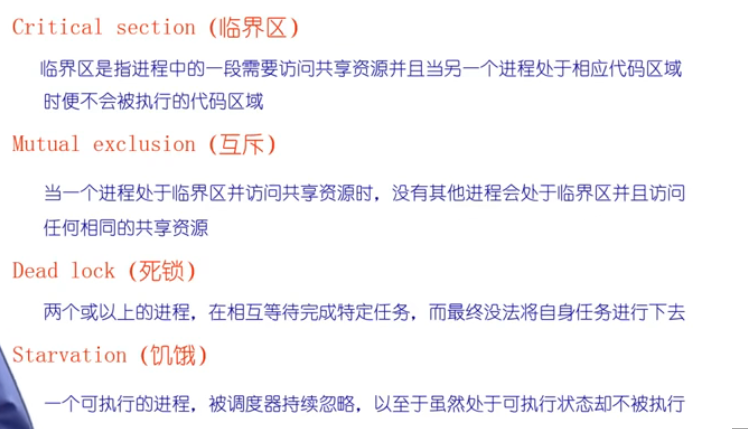
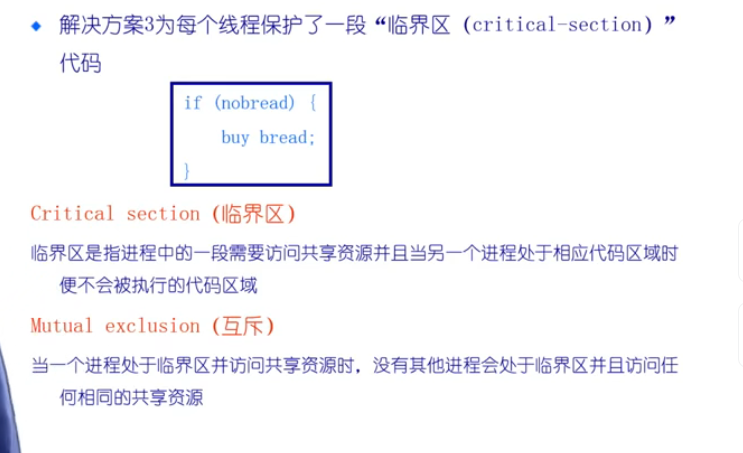
临界区:
只允许一个进程去访问临界区的代码,这个代码主要对一起共享的资源进行读操作或写操作,如果有一个程序在临界区执行了,其他程序就需要等地 -
互斥:
确保只有一个程序在临界区叫互斥
解决办法
?5. 临界区
-
互斥
: 同一时间临界区中最多存在一个线程 -
Progress
: 如果一个线程想要进入临界区,那么它最终会成功 -
有限等待
: 如果一个线程i处于入口区,那么在i的请求被接受之前,其他线程进入临界区的时间是有限制的 -
无忙等待(可选)
: 如果一个进程在等待进入临界区,那么在它可以进入之前会被挂起
?5.1 方法1:禁用硬件中断
中断除了响应硬件事件之外,中断还会使得进程切换,这也就会导致死锁和饥饿等问题
时钟中断即使当前程序在执行,也会打断该程序,OS完成调度,切换到其他进程
-
没有中断,没有上下文切换,因此没有并发
- 硬件将中断处理延迟到中断被启用之后
- 大多数现代计算机体系结构都提供指令来完成
-
进入临界区
- 禁用中断
-
离开临界区
- 开启中断
缺点
- 对于多CPU是有限制的,因为一个CPU执行屏蔽中断时,他只会中断它自己的,并不会中断其他CPU的中断,其他CPU还是会继续执行
-
受制于临界区的执行时间,,对整个系统效率会产生影响,不适合多CPU
?5.2 方法2:基于软件的解决方法
-
进程1和进程2只能交替进行,一旦有一个程序退出,那么另一个程序下次还想进入临界区,那么它一直等待,一直进不去
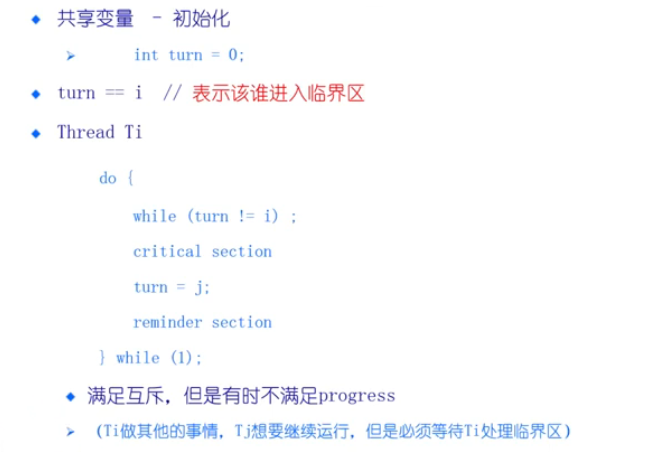
缺点
- 满足互斥但是不满足前进
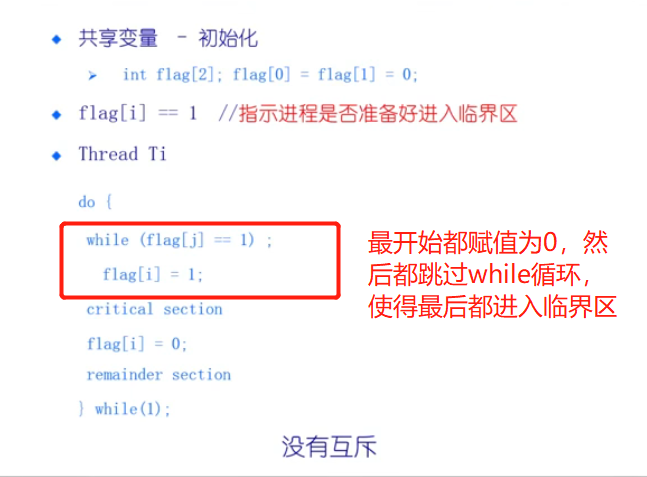
改进
- 无法满足互斥
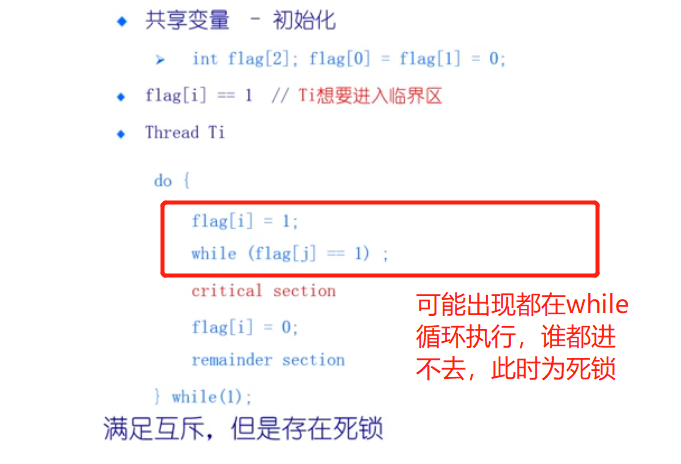
- 将flag[i]=1,放在前面,此时满足互斥但是存在死锁
-
正确方法
:把前面的方法综合一下 -
满足进程Pi和Pj之间互斥的经典的基于软件的解决方法(1981年)
-
使用两个共享数据项
-
int turn; //指示该谁进入临界区
-
bool flag[]; //指示进程是否准备好进入临界区
-
-
进入临界区:
flag[i] = true;
turn = j;
while(flag[j] && turn == j);
-
退出临界区
flag[i] = false;
实例
do{
flag[i] = true;
turn = j;
while(flag[j] && turn == j);
CRITICAL SECTION
flag[i] = false;
REMAINDER SECTION
}while(true);
Bakery 算法(N个进程的临界区)
- 进入临界区之前,进程接收一个数字
- 得到的数字最小的进入临界区
- 如果进程Pi和Pj收到相同的数字,那么如果i<j,Pi先进入临界区,否则Pj先进入临界区
- 编号方案总是按照枚举的增加顺序生成数字
俩个窗口,很多人去窗口取钱,首先取票号,当俩个人取的票号一样时,此时比较身份证,看谁的身份证小则优先取钱。
总结
Dekker算法(1965):
第一个针对双线程例子的正确解决方案
Bakery算法(1979):
针对n线程的临界区问题解决方案
复杂:
-
需要两个进程的共享数据项
需要忙等待:
-
浪费CPU时间
没有硬件保证的情况下无真正的软件解决方案:
-
Perterson算法需要原子的LOAD和STORE指令
?5.3 方法3:更高级的抽象
硬件提供了一些原语
- 像中断禁用, 原子操作指令等
- 大多数现代体系结构都这样
操作系统提供更高级的编程抽象来简化并行编程
- 例如,锁,信号量
- 从硬件原语中构建
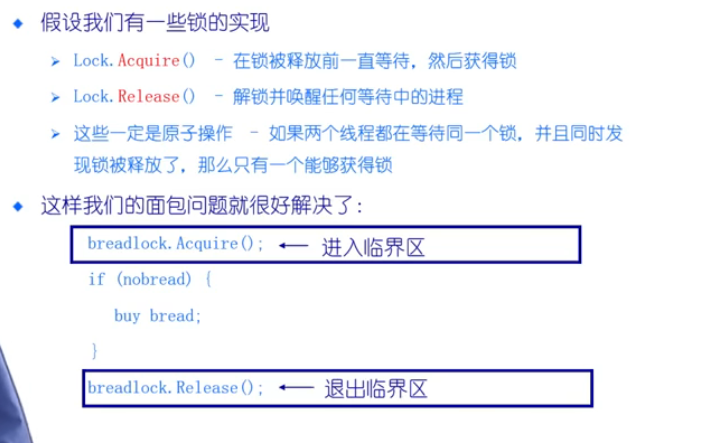
锁是一个抽象的数据结构
- 一个二进制状态(锁定,解锁),两种方法
- Lock::Acquire() 锁被释放前一直等待,然后得到锁
- Lock::Release() 锁释放,唤醒任何等待的进程
使用锁来编写临界区
- 前面的例子变得简单起来:
lock_next_pid->Acquire();
new_pid = next_pid++;
lock_next_pid->Release();
?5.3.1 现代操作系统提供的方法
大多数现代体系结构都提供特殊的原子操作指令
- 通过特殊的内存访问电路
- 针对单处理器和多处理器
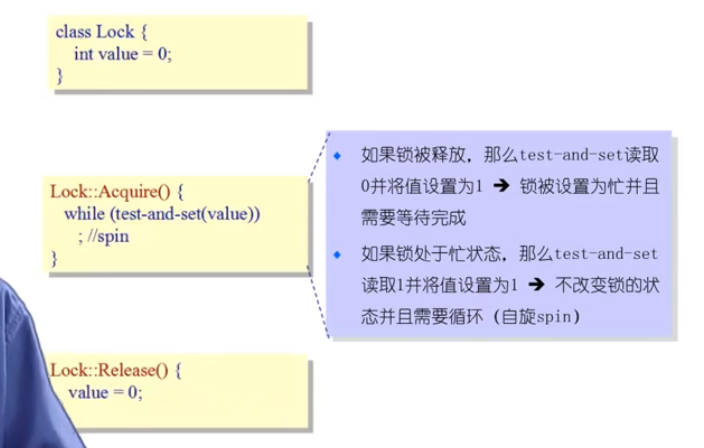
Test-and-Set 测试和置位
- 从内存中读取值
- 测试该值是否为1(然后返回真或假)
- 内存值设置为1
交换
- 交换内存中的两个值
这俩个程序,虽然由多条指令完成,但是被封装成了机器指令, 意味着在执行这三条指令的时候,不允许打断
bool TestandSet(bool *target){
bool rv = *target;
*target = true;
return rv;
}
void Exchange(bool *a, bool *b){
bool tmp = *a;
*a = *b;
*b = tmp;
}
- 不止适用于俩个进程,也适用于多个进程,而且多个进程,进入临界区与退出临界区的操作步骤是一样的
问题
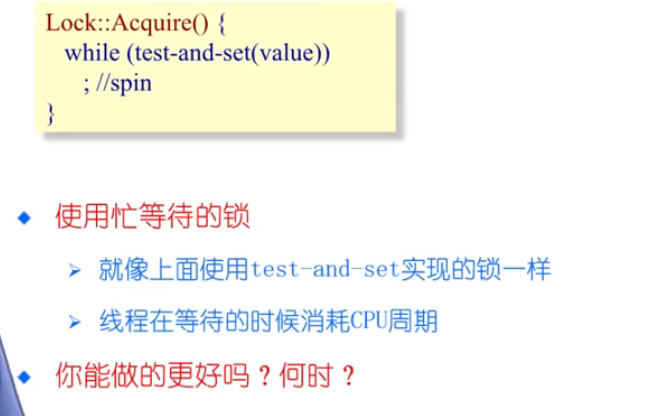
解决办法1:使用
test-and-set
-
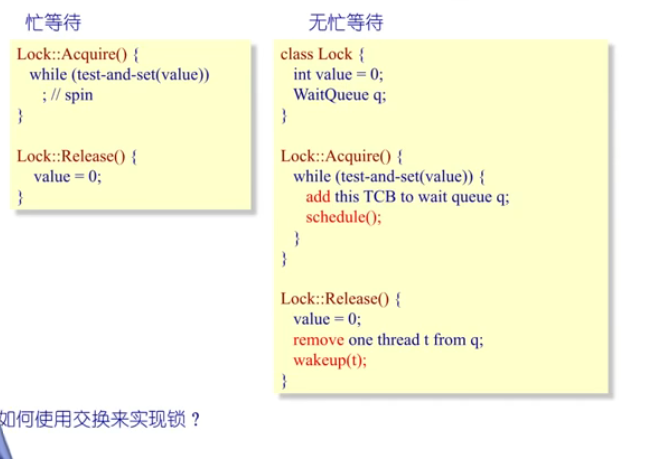
当一个进程发现自己进不了临界区,需要等待时,可以让该进程阻塞睡眠,将该进程挂在队列中去,把CPU让出来,给其他进程使用,当之前的进程,退出临界区后,他会唤醒睡眠的进程
-
如果临界区很短,则使用忙等待,不需要进行上下文切换,上下文切换开销相对大
-
如果临界区很长,开销远远大于上下文切换,选择无忙等待
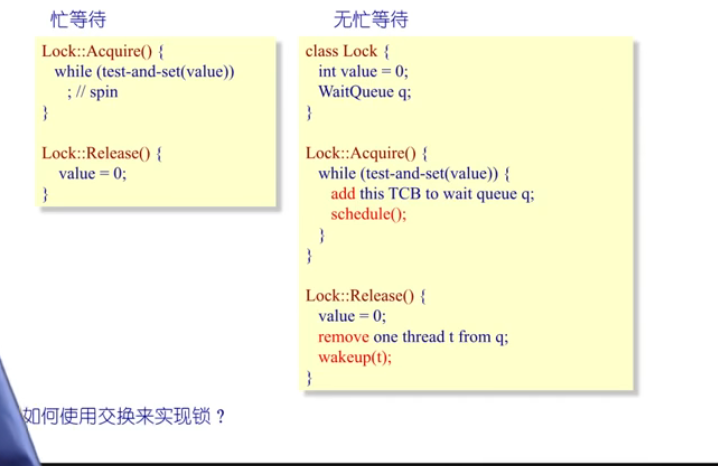
解决办法2:使用
exchange
共享数据(初始化为0)
int lock = 0;
线程Ti
int key:
do {
key = 1;
while (key == 1) exchange(lock, key);
critical section
lock = 0;
remainder section
}
优点
- 适用于单处理器或者共享主存的多处理器中任意数量的进程
- 简单并且容易证明
- 可以用于支持多临界区
缺点
- 忙等待消耗处理器时间
- 当进程离开临界区并且多个进程在等待的时候可能导致饥饿
-
死锁
- 如果一个低优先级的进程拥有临界区并且一个高优先级进程也需求,那么高优先级进程会获得处理器并等待临界区(使得高优先级进程忙等待,使得低优先级进程无法释放锁)
?6. 总结
-
锁是更高等级的编程抽象
-
互斥可以使用锁来实现
-
通常需要一定等级的硬件支持
-
-
常用的三种实现方法
-
禁用中断(仅限于单处理器)
-
软件方法(复杂)
-
原子操作指令(单处理器或多处理器均可)——最常用
-
-
可选的实现内容:
-
有忙等待
-
无忙等待
-