basic
1. describe
basic files
<home>/app
├── CMakeLists.txt
├── prj.conf
└── src
└── main.c
# SPDX-License-Identifier: Apache-2.0
# CMakeLists.txt
cmake_minimum_required(VERSION 3.13.1)
find_package(Zephyr HINTS $ENV{ZEPHYR_BASE})
project(blinky)
target_sources(app PRIVATE src/main.c)
# prj.conf
CONFIG_GPIO=y
/*
* main.c
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr.h>
#include <device.h>
#include <devicetree.h>
#include <drivers/gpio.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0)
#if DT_HAS_NODE(LED0_NODE)
#define LED0 DT_GPIO_LABEL(LED0_NODE, gpios)
#define PIN DT_GPIO_PIN(LED0_NODE, gpios)
#if DT_PHA_HAS_CELL(LED0_NODE, gpios, flags)
#define FLAGS DT_GPIO_FLAGS(LED0_NODE, gpios)
#endif
#else
/* A build error here means your board isn't set up to blink an LED. */
#error "Unsupported board: led0 devicetree alias is not defined"
#define LED0 ""
#define PIN 0
#endif
#ifndef FLAGS
#define FLAGS 0
#endif
void main(void)
{
struct device *dev;
bool led_is_on = true;
int ret;
dev = device_get_binding(LED0);
if (dev == NULL) {
return;
}
ret = gpio_pin_configure(dev, PIN, GPIO_OUTPUT_ACTIVE | FLAGS);
if (ret < 0) {
return;
}
while (1) {
gpio_pin_set(dev, PIN, (int)led_is_on);
led_is_on = !led_is_on;
k_msleep(SLEEP_TIME_MS);
}
}
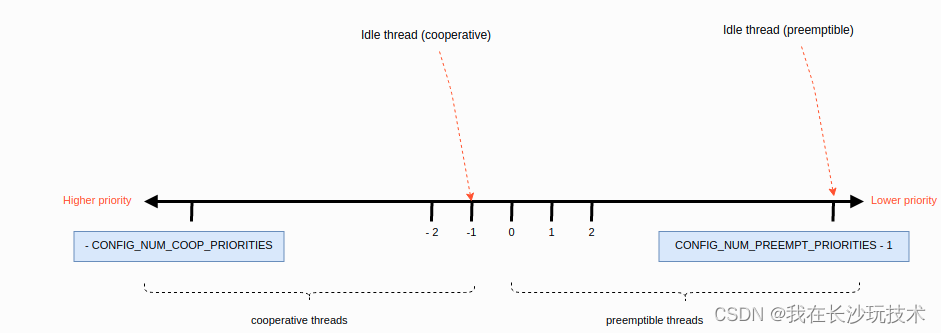
2. threads
priority
stack
K_KERNEL_STACK/K_THREAD_STACK(CONFIG_USERSPACE=y)
K_THREAD_STACK=K_KERNEL_STACK when CONFIG_USERSPACE=n
K_THREAD_STACK_DEFINE
difference with other os,
- fix 3 paramters
-
delay for the thread to startup,
K_NO_WAIT
for no delay
functions
// macro, static create
// K_ESSENTIAL, K_FP_REGS, and K_SSE_REG, use '|' to join
#define K_THREAD_DEFINE(name, stack_size, entry, p1, p2, p3, prio, options, delay)
// dynamic
k_tid_t k_thread_create(struct k_thread *new_thread,
k_thread_stack_t *stack,
size_t stack_size,
k_thread_entry_t entry,
void *p1, void *p2, void *p3,
int prio, u32_t options, k_timeout_t delay);
// start/resume/abort/join
void k_thread_start(k_tid_t thread);
void k_thread_resume(k_tid_t thread);
int k_thread_join(struct k_thread *thread, k_timeout_t timeout);
void k_thread_abort(k_tid_t thread);
//sleep
s32_t k_msleep(s32_t ms);
s32_t k_usleep(s32_t us);
s32_t k_sleep(k_timeout_t timeout);
3. thread sync
# spcific value
K_NO_WAIT and K_FOREVER
# call in isr should use K_NO_WAIT
# irq lock
unsigned int irq_lock();
void irq_unlock(unsigned int)
# sem
int k_sem_take(struct k_sem *sem, k_timeout_t timeout);
void k_sem_give(struct k_sem *sem);
void k_sem_reset(struct k_sem *sem);
unsigned int k_sem_count_get(struct k_sem *sem);
// static create
#define K_SEM_DEFINE(name, initial_count, count_limit) \
Z_STRUCT_SECTION_ITERABLE(k_sem, name) = \
Z_SEM_INITIALIZER(name, initial_count, count_limit); \
BUILD_ASSERT(((count_limit) != 0) && \
((initial_count) <= (count_limit)));
// dynamic create
int k_sem_init(struct k_sem *sem, unsigned int initial_count,
unsigned int limit);
# mutex
// static create
#define K_MUTEX_DEFINE(name) \
Z_STRUCT_SECTION_ITERABLE(k_mutex, name) = \
_K_MUTEX_INITIALIZER(name)
// dynamic create
int k_mutex_init(struct k_mutex *mutex);
// A thread is permitted to lock a mutex it has already locked. The operation
// completes immediately and the lock count is increased by 1.
int k_mutex_lock(struct k_mutex *mutex, k_timeout_t timeout);
// The mutex cannot be claimed by another thread until it has been unlocked by
// the calling thread as many times as it was previously locked by that
// thread.
int k_mutex_unlock(struct k_mutex *mutex);
# queue
void k_queue_init(struct k_queue *queue);
void k_queue_cancel_wait(struct k_queue *queue);
extern void k_queue_append(struct k_queue *queue, void *data);
s32_t k_queue_alloc_append(struct k_queue *queue, void *data);
extern void k_queue_prepend(struct k_queue *queue, void *data);
s32_t k_queue_alloc_prepend(struct k_queue *queue, void *data);
void k_queue_insert(struct k_queue *queue, void *prev, void *data);
nt k_queue_append_list(struct k_queue *queue, void *head, void *tail);
int k_queue_merge_slist(struct k_queue *queue, sys_slist_t *list);
void *k_queue_get(struct k_queue *queue, k_timeout_t timeout);
bool k_queue_remove(struct k_queue *queue, void *data)
bool k_queue_unique_append(struct k_queue *queue, void *data)
int k_queue_is_empty(struct k_queue *queue);
void *k_queue_peek_head(struct k_queue *queue);
void *k_queue_peek_tail(struct k_queue *queue);
#define K_QUEUE_DEFINE(name) \
Z_STRUCT_SECTION_ITERABLE(k_queue, name) = \
_K_QUEUE_INITIALIZER(name)
# msgq
// static reate
#define K_MSGQ_DEFINE(q_name, q_msg_size, q_max_msgs, q_align) \
static char __noinit __aligned(q_align) \
_k_fifo_buf_##q_name[(q_max_msgs) * (q_msg_size)]; \
Z_STRUCT_SECTION_ITERABLE(k_msgq, q_name) = \
_K_MSGQ_INITIALIZER(q_name, _k_fifo_buf_##q_name, \
q_msg_size, q_max_msgs)
// dynamic create
void k_msgq_init(struct k_msgq *q, char *buffer, size_t msg_size,
u32_t max_msgs);
int k_msgq_alloc_init(struct k_msgq *msgq, size_t msg_size,
u32_t max_msgs);
int k_msgq_cleanup(struct k_msgq *msgq);
int k_msgq_put(struct k_msgq *msgq, void *data, k_timeout_t timeout);
int k_msgq_get(struct k_msgq *msgq, void *data, k_timeout_t timeout);
// get the data and keep in the queue
int k_msgq_peek(struct k_msgq *msgq, void *data);
void k_msgq_purge(struct k_msgq *msgq);
u32_t k_msgq_num_free_get(struct k_msgq *msgq);
u32_t k_msgq_num_used_get(struct k_msgq *msgq);
# spin_lock
k_spinlock_key_t k_spin_lock(struct k_spinlock *l);
void k_spin_unlock(struct k_spinlock *l,k_spinlock_key_t key);
# poll_event
extern void k_poll_event_init(struct k_poll_event *event, u32_t type,
int mode, void *obj);
int k_poll(struct k_poll_event *events, int num_events,
k_timeout_t timeout);
void k_poll_signal_init(struct k_poll_signal *signal);
void k_poll_signal_reset(struct k_poll_signal *signal);
void k_poll_signal_check(struct k_poll_signal *signal,
unsigned int *signaled, int *result);
int k_poll_signal_raise(struct k_poll_signal *signal, int result);
# atomic
// compare and set
bool atomic_cas(atomic_t *target, atomic_val_t old_value,
atomic_val_t new_value);
bool atomic_ptr_cas(atomic_ptr_t *target, void *old_value,
void *new_value);
atomic_val_t atomic_add(atomic_t *target, atomic_val_t value);
atomic_val_t atomic_sub(atomic_t *target, atomic_val_t value);
atomic_val_t atomic_inc(atomic_t *target);
atomic_val_t atomic_dec(atomic_t *target);
atomic_val_t atomic_get(const atomic_t *target);
void *atomic_ptr_get(const atomic_ptr_t *target);
atomic_val_t atomic_set(atomic_t *target, atomic_val_t value);
void *atomic_ptr_set(atomic_ptr_t *target, void *value);
atomic_val_t atomic_clear(atomic_t *target);
void *atomic_ptr_clear(atomic_ptr_t *target);
atomic_val_t atomic_or(atomic_t *target, atomic_val_t value);
atomic_val_t atomic_xor(atomic_t *target, atomic_val_t value);
atomic_val_t atomic_nand(atomic_t *target, atomic_val_t value);
# more to known
notify mbox work_q
4. timer
void k_timer_init(struct k_timer *timer,
k_timer_expiry_t expiry_fn,
k_timer_stop_t stop_fn);
void k_timer_start(struct k_timer *timer,
k_timeout_t duration, k_timeout_t period);
void k_timer_stop(struct k_timer *timer);
u32_t k_timer_status_get(struct k_timer *timer);
u32_t k_timer_status_sync(struct k_timer *timer);
k_ticks_t k_timer_expires_ticks(struct k_timer *timer);
k_ticks_t k_timer_remaining_ticks(struct k_timer *timer);
u32_t k_timer_remaining_get(struct k_timer *timer);
s64_t k_uptime_ticks(void);
s64_t k_uptime_get(void); // unit ms
u32_t k_cycle_get_32(void);
5. utils
# fifo, just wrap of the queue, thread safe
#define Z_FIFO_INITIALIZER(obj) \
{ \
._queue = _K_QUEUE_INITIALIZER(obj._queue) \
}
#define k_fifo_init(fifo) \
k_queue_init(&(fifo)->_queue)
#define k_fifo_is_empty(fifo) \
k_queue_is_empty(&(fifo)->_queue)
#define k_fifo_peek_head(fifo) \
k_queue_peek_head(&(fifo)->_queue)
#define k_fifo_peek_tail(fifo) \
k_queue_peek_tail(&(fifo)->_queue)
#define K_FIFO_DEFINE(name) \
Z_STRUCT_SECTION_ITERABLE(k_fifo, name) = \
Z_FIFO_INITIALIZER(name)
# lifo just wrap of the queue
like upper
# rbtree
void rb_insert(struct rbtree *tree, struct rbnode *node);
void rb_remove(struct rbtree *tree, struct rbnode *node);
struct rbnode *rb_get_min(struct rbtree *tree)
struct rbnode *rb_get_max(struct rbtree *tree)
bool rb_contains(struct rbtree *tree, struct rbnode *node);
void rb_walk(struct rbtree *tree, rb_visit_t visit_fn,
void *cookie);
struct rbnode *z_rb_foreach_next(struct rbtree *tree, struct _rb_foreach *f);
#define RB_FOR_EACH(tree, node) \
for (struct _rb_foreach __f = _RB_FOREACH_INIT(tree, node); \
(node = z_rb_foreach_next(tree, &__f)); \
/**/)
# list
dlist slist like rb tree
6. interrupt
不受控的中断使用时需要打开
CONFIG_ZERO_LATENCY_IRQS
并且不使用系统调用。
普通中断如下
The following code defines and enables an ISR.
#define MY_DEV_IRQ 24 /* device uses IRQ 24 */
#define MY_DEV_PRIO 2 /* device uses interrupt priority 2 */
/* argument passed to my_isr(), in this case a pointer to the device */
#define MY_ISR_ARG DEVICE_GET(my_device)
#define MY_IRQ_FLAGS 0 /* IRQ flags */
void my_isr(void *arg)
{
... /* ISR code */
}
void my_isr_installer(void)
{
...
IRQ_CONNECT(MY_DEV_IRQ, MY_DEV_PRIO, my_isr, MY_ISR_ARG, MY_IRQ_FLAGS);
irq_enable(MY_DEV_IRQ);
...
}
Since the
IRQ_CONNECT
macro requires that all its parameters be known at build time, in some cases this may not be acceptable. It is also possible to install
interrupt
s at runtime with
irq_connect_dynamic()
. It is used in exactly the same way as
IRQ_CONNECT
:
void my_isr_installer(void)
{
...
irq_connect_dynamic(MY_DEV_IRQ, MY_DEV_PRIO, my_isr, MY_ISR_ARG,
MY_IRQ_FLAGS);
irq_enable(MY_DEV_IRQ);
...
}
Dynamic
interrupt
s require the
CONFIG_DYNAMIC_INTERRUPTS
option to be enabled. Removing or re-configuring a dynamic interrupt is currently unsupported.
7. memory
// CONFIG_HEAP_MEM_POOL_SIZE
// user heap
k_heap_xxx
// user pool
k_mem_pool
8. device
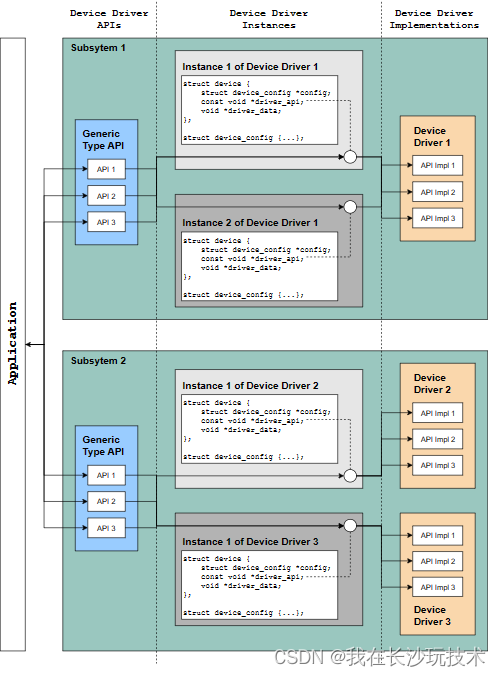
struct device {
const char *name;
const void *config; ---> readonly config, struct
const void *api; ---> api interface struct, reference sub system
void * const data;
};