一、学习资源
:
|
1、正点原子免费教学视频:
原子哥,专注电子技术教学
2、FreeRTOS官方网站:
FreeRTOS – Market leading RTOS (Real Time Operating System) for embedded systems with Internet of Things extensions
3、PPT与源码资料:在”FreeRTOS资料”目录里。
|
二、FreeRTOS基本介绍
:
|
1、FreeRTOS简介 :
是一个
免费的 嵌入式 实时操作 系统;属于 轻量级 小系统,核心代码9000行左右,包含在3个.c文件中;软件实现优先级数量不限,硬件优先级受CPU限制, 任务优先级值越大则越高 ;可以创建不限数量的任务,但要考虑堆栈内存资源;支持 抢占式、协程式、时间片流转 等任务调度算法。
///
2、FreeRTOS基础知识 : 任务调度简介 :
调度器就是使用相关的调度算法来决定当前需要执行的哪个任务,FreeRTOS一共支持
三种任务调度方式 : ① 抢占式调度 :主要是针对 优先级不同 的任务,每个任务都有一个优先级,优先级高的任务可以抢占优先级低的任务。 ② 时间片调度 :主要针对 优先级相同 的任务,当多个任务的优先级相同时,任务调度器会在 每一次 系统时钟节拍到的时候切换任务( sysTick的中断时间可设置 )。 ③ 协程式调度 : 当前执行任务 将会 一直运行 ,同时高优先级的任务 不会抢占 低优先级任务( FreeRTOS现在虽然还支持,但已经不再更新这种调度算法了 )。 任务状态 : ① 运行态 :正在执行的任务,该任务就处于运行态, 同一个时间仅有一个任务处于运行态 ; ② 就绪态 :如果该任务已经 能够被执行 ,但当前 还未被执行 ,那么该任务处于就绪态; ③ 阻塞态 :如果一个任务因 延时或等待外部事件发生 ,那么这个任务就处于阻塞态; ④ 挂起态 : 类似暂停 ,调用函数 vTaskSuspend( )进入 挂起 态,需要调用 vTaskResume() 函数来解挂进入 就绪 态; 任务状态转换图 : 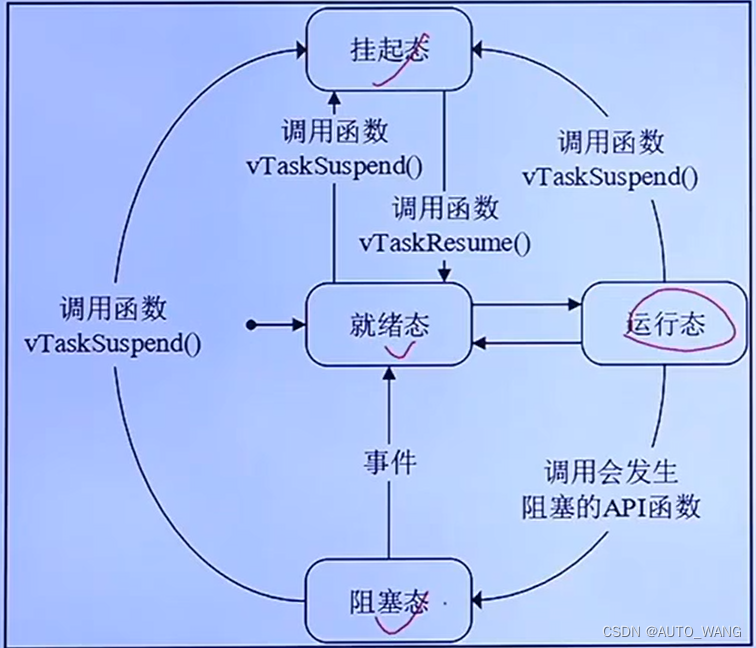
除了运行态,其他的任务状态都有其
任务状态列表 : ① 就绪列表(哈希表) :pxReadyTasksLists[x],其中x代表任务优先级数值,每个优先级对应32位变量的一个位(bit=1代表该优先级有就绪的任务); ② 阻塞列表 :pxDelayedTaskList; ③ 挂起列表 :xSuspendedTaskList;
///
3、FreeRTOS的下载 :
直接从官网上点击“下载”后,默认选择最新的版本即可。
///
4、FreeRTOS源码文件结构解析 : 
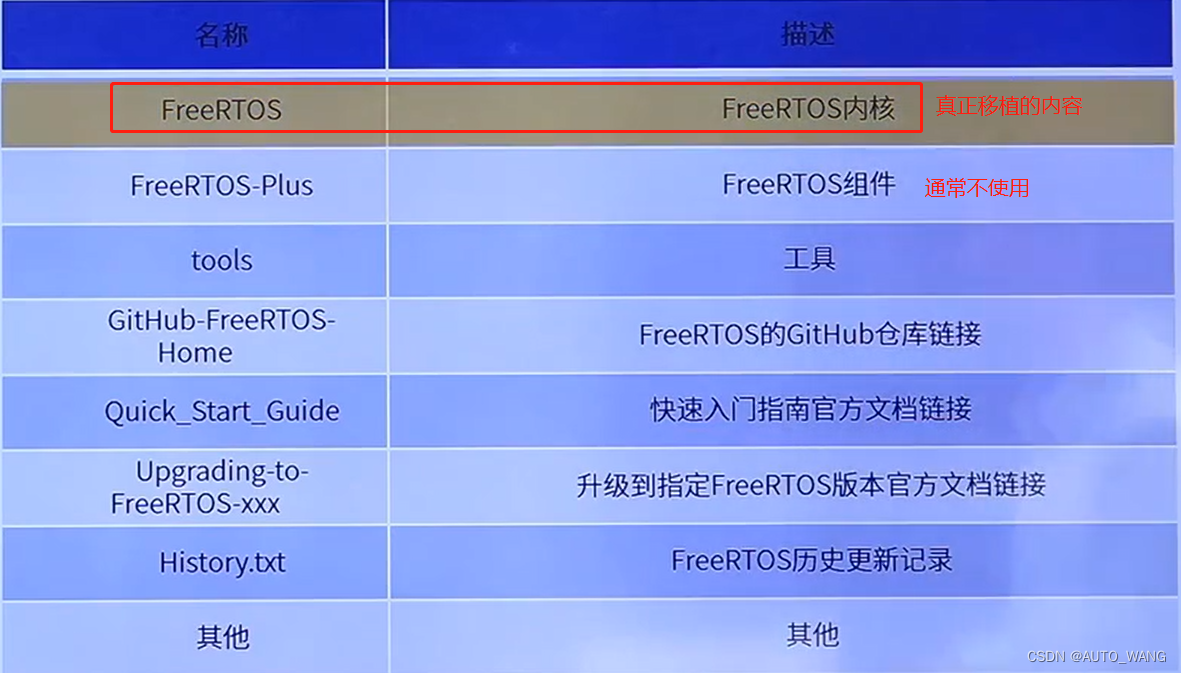
FreeRTOS内核目录 :./FreeRTOS 
① Demo :FreeRTOS演示例程;(主要) ② License :FreeRTOS相关许可; ③ Source :FreeRTOS源码;(核心) ④ Test :公用以及移植层测试代码; 内核源码的Demo文件夹 :./FreeRTOS/Demo
提供各种CPU架构和不同厂家SOC的移植例程。

内核源码的Source文件夹 :./FreeRTOS/Source 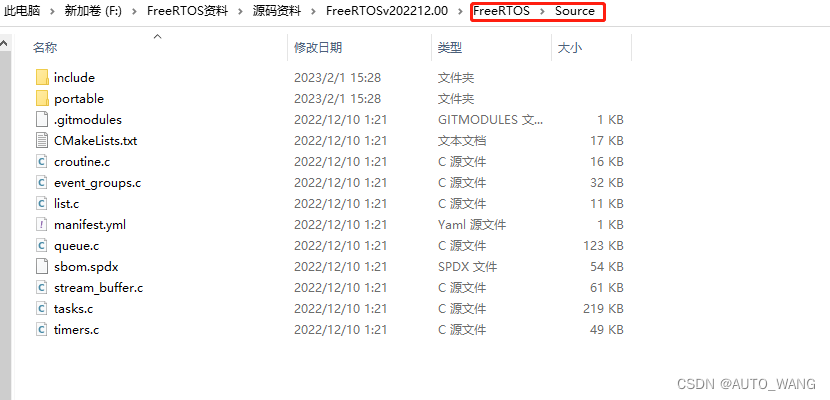
① include目录 :包含了FreeRTOS的头文件,必须添加; ② portable目录 :包含了FreeRTOS的移植文件,必须添加; ③ croutine.c文件 :协程调度相关,可以选择性使用; ④ event_groups.c文件 :事件触发相关,可以选择; ⑤ list.c文件 :列表实现相关文件,必须添加; ⑥ queue.c文件 :队列实现相关,必须添加; ⑦ stream_buffer.c文件 :流式缓冲区相关文件,可以选择; ⑧ tasks.c文件 :任务处理相关文件,必须添加; ⑨ timers.c文件 :软件定时器实现相关,可以选择; 软硬件桥梁portable目录 :./FreeRTOS/Source/portable portable目录 提供的FreeRTOS与不同硬件平台的连接桥梁, 实现FreeRTOS可移植的关键 。 对于STM32这种ARM架构来讲,实际上使用到的是图片中的红圈内容 。 
① Keil :我们使用的开发平台,它还指向RVDS; ② RVDS :不同内核芯片的移植文件; ③ MemMang :内存管理文件;
///
|
三、FreeRTOS的移植
:
|
1、基于正点原子STM32F103开发平台 :
这里并没有说明FreeRTOS的原理,只是通过移植过程去
感性体验 了一下FreeRTOS系统。移植的具体过程可以参考正点原子提供的 《FreeRTOS开发指南》 第二章; 下面是本次移植过程的个人总结 :
① 需要在工程中添加 FreeRTOS的源码 以及 板级支持.c文件 ;
②
设备驱动 其实还是需要 自己编写实现 的,也可以利用HAL库函数;
③ 对于
sysTick中断 ,需要添加FreeRTOS提供的的回调函数;因为FreeRTOS是通过sysTick来实现周期任务切换的;
④ FreeRTOS源码已经
实现了svc中断和PandSV中断 ,所以必须 删除其他地方的实现 ;
⑤ FreeRTOS其实
只是提供的多任务算法和内存管理算法 ,其他都需要自己开发;
///
2、基于华大CPU的系统移植( 揉面机项目 ) : 过程讲解 :
① 需要移植FreeRTOS的源码文件到工程目录中,包括与内核相关的文件;
②
FreeRTOSConfig.h 文件中的 中断、堆内存、系统时钟频率、空闲任务栈空间以及任务优先级方式 等,需要根据MCU实际资源来配置;
③ 本次实验发现,需要
修改FreeRTOS源码 中 对systick的 配置宏portNVIC_SYSTICK_CLK_BIT_CONFIG ,可能因为内核M0和M3不一样吧( 选择时钟源不一样!! );
④ 试验中发现,
只允许 使用 软件优先级 来管理任务,无法使用硬件优先级;
⑤
从任务调度上来说 , 软件优先级 不再依靠32位的变量bit位,而是 循环从高到低 检查 对应就绪列表是否为空,第一个不为空的就是目前最高优先级任务 ;取出其中一个任务控制块作为新的任务,随后记录目前最高优先级;
⑥
对于新建任务来说 ,每次添加 新的任务 都需要 和历史最高优先级做对比 ;
⑦ 如果
.s文件 中有 复位向量表与中断控制器 的相关指令, 请屏蔽 ;
///
3、基于STM32G0的移植( 端子机项目 ) : 过程讲解 :
① 根据应用需求的不同,这里的
硬件设备扫描任务优先级要 大于 应用逻辑 ;
② 由于应用上使用了
TIM1发送脉冲中断 ,且此中断需要保证即时响应,所以必须 脱离FreeRTOS的管理 ;
///
|
四、FreeRTOS的系统配置文件
:
|
1、参考资料 :
② 正点原子提供:
《FreeRTOS开发指南》 第三章; 2、基本配置项的了解 :
使用FreeRTOS系统的工程,必须在工程中创建一个对应的配置文件:
FreeRTOSConfig.h ;该文件提供 各种全局宏 定义来 选择性编译FreeRTOS源码 以及 为工程提供系统相关参数 ;配置文件中的 宏定义主要 分为三大类 :config、INCLUDE 和 其他配置项。
下面基于
正点原子提供的 STM32F103 案例中的配置文件 ,其他芯片可以基于此案例来修改: 3、与FreeRTOS中断相关的配置项 :
在配置FreeRTOS的中断配置项之前,需要先知道使用的SOC的中断管理资源;以下是
FreeRTOS中断有关配置项的简介 : ① configPRIO_BITS :此宏是用于辅助配置的宏,主要用于辅助配置宏configKERNEL_INTERRUPT_PRIORITY 和宏configMAX_SYSCALL_INTERRUPT_PRIORITY 的;此宏 应定义为 MCU 的 8 位优先级配置寄存器实际使用的位数 ;因为STM32 只使用到了中断优先级配置寄存器的高4 位,因此,此宏应配置为4。 ② configLIBRARY_LOWEST_INTERRUPT_PRIORITY :此宏是用于辅助配置宏configKERNEL_INTERRUPT_PRIORITY 的,此宏 应设置为 MCU 的最低优先等级 ;因为STM32 只使用了中断优先级配置寄存器的高4 位,因此MCU 的最低优先等级就是2^4-1=15,因此,此宏应配置为15。 ③ configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY :此宏是用于辅助配置宏configMAX_SYSCALL_INTERRUPT_PRIORITY 的;此宏 适用于配置 FreeRTOS 可管理的最高优先级的中断 ,此功能就是 操作 BASEPRI 寄存器来实现 的;此宏的值可以根据用户的实际使用场景来决定。 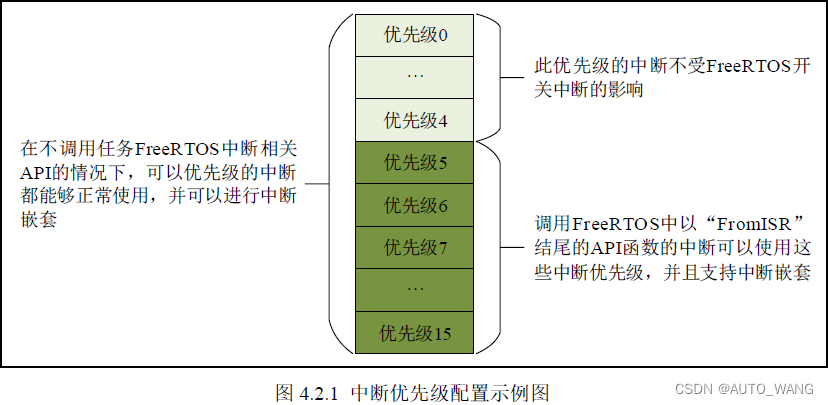
④ configKERNEL_INTERRUPT_PRIORITY :此宏应配置为MCU 的最低优先级在中断优先级配置寄存器中的值, 在 FreeRTOS 的源码中,使用此宏将 SysTick 和 PenSV 的中断优先级设置为最低优先级 ;因为STM32 只使用了中断优先级配置寄存器的高4 位,因此,此宏应配置为最低中断优先级在中断优先级配置寄存器高4 位的表示,即(configLIBRARY_LOWEST_INTERRUPT_PRIORITY<<(8-configPRIO_BITS))。 ⑤ configMAX_SYSCALL_INTERRUPT_PRIORITY :此宏 用于配置 FreeRTOS 可管理的最高优先级的中断,在 FreeRTOS 的源码中,使用此宏来打开和关闭中断 ;因为STM32 只使用了中断优先级配置寄存器的高4 位,因此,此宏应配置为(configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY<<(8-configPRIO_BITS))。 ⑥ configMAX_API_CALL_INTERRUPT_PRIORITY : 此宏为宏 configMAX_SYSCALL_INTERRUPT_PRIORITY 的新名称 ,只被用在FreeRTOS 官方一些新的移植当中;此宏与宏configMAX_SYSCALL_INTERRUPT_PRIORITY 是等价的。 |
五、FreeRTOS任务基础知识
:
|
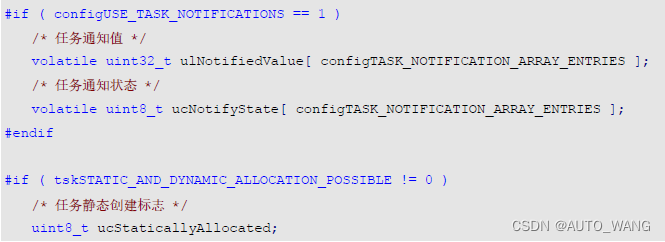
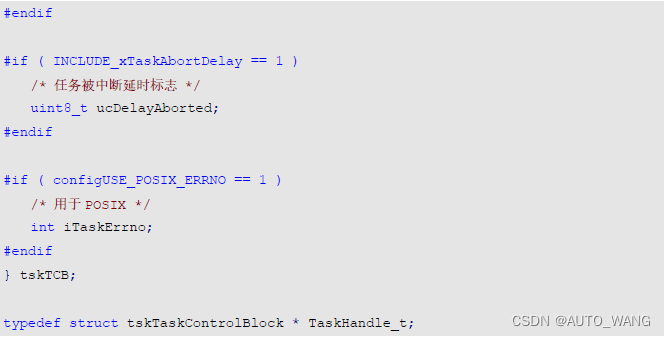
1、FreeRTOS 任务控制块 :
FreeRTOS中
每一个已创建任务 都包含 一个任务控制块 , 任务控制块是一个 结构体变量 ,FreeRTOS用任务控制块结构体存储任务的属性( typedef struct tskTaskControlBlock )。FreeRTOS的任务控制块结构体中包含了很多成员变量,但是,大部分的 成员变量都是可以通过 FreeRTOSConfig.h 配置文件 中的配置项宏定义进行裁剪的。 

2、FreeRTOS 创建和删除任务 相关API函数 : 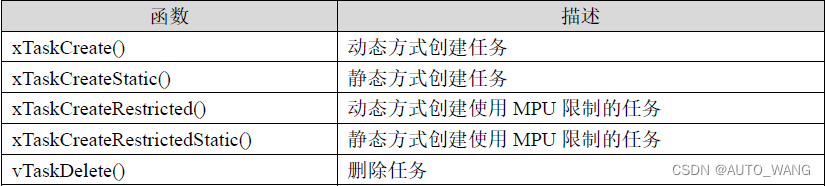
1、动态方式创建任务 :
此函数用于使用动态的方式创建任务,任务的任务控制块以及任务的栈空间所需的内存,均由FreeRTOS从FreeRTOS管理的堆中分配,若使用此函数,
需要在 FreeRTOSConfig.h 文件中将宏 configSUPPORT_DYNAMIC_ALLOCATION 配置为 1 ;此函数创建的任务会立刻进入就绪态,由任务调度器调度运行; 函数原型如下所示 : 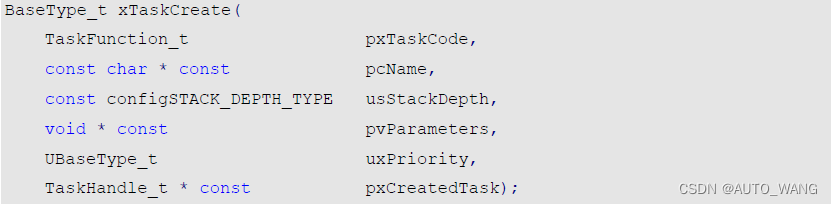


函数返回值 : 
2、静态方式创建任务 :
此函数用于使用静态的方式创建任务,任务的任务控制块以及任务的栈空间所需的内存,需要由用户分配提供,若使用此函数,
需要在 FreeRTOSConfig.h 文件中将宏 configSUPPORT_STATIC_ALLOCATION 配置为 1 ;此函数创建的任务会立刻进入就绪态,由任务调度器调度运行。 函数原型如下所示 : 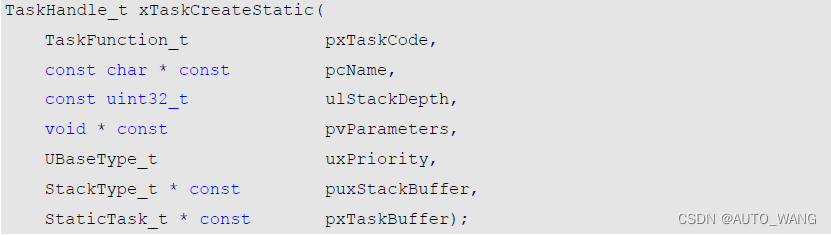

函数返回值 : 
3、任务的删除 :
此函数用于删除已被创建的任务,被删除的任务将被从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除;
要注意的是,空闲任务会负责释放被删除任务中由系统分配的内存,但是由用户在任务删除前申请的内存,则需要由用户在任务被删除前提前释放 ,否则将导致内存泄露;若使用此函数, 需要在 FreeRTOSConfig.h 文件中将宏 INCLUDE_vTaskDelete 配置为 1 ; 函数原型如下所示 : 3、FreeRTOS 任务的挂起和恢复 相关API函数 : 
1、挂起任务 :
此函数用于挂起任务,若使用此函数,
需要在 FreeRTOSConfig.h 文件中将宏 INCLUDE_vTaskSuspend 配置为 1 ;无论优先级如何,被挂起的任务都将不再被执行,直到任务被恢复;此函数并不支持嵌套,不论使用此函数重复挂起任务多少次,只需调用一次恢复任务的函数,那么任务就不再被挂起。 函数原型如下所示 : 
2、在任务中恢复被挂起的任务 :
此函数用于
在任务中恢复 被挂起的任务,若使用此函数, 需要在 FreeRTOSConfig.h 文件中将宏 INCLUDE_vTaskSuspend 配置为 1 ;不论一个任务被函数vTaskSuspend()挂起多少次,只需要使用函数vTakResume()恢复一次,就可以继续运行。 函数原型如下所示 : 
3、在中断中恢复被挂起的任务 :
此函数用于
在中断中恢复 被挂起的任务,若使用此函数, 需要在 FreeRTOSConfig.h 文件中将宏 INCLUDE_xTaskResumeFromISR 配置为 1 ; 必须在FreeRTOS所管理的 中断优先级 中断中才可以恢复任务 ;不论一个任务被函数vTaskSuspend()挂起多少次,只需要使用函数vTakResumeFromISR()恢复一次,就可以继续运行。 函数原型如下所示 : 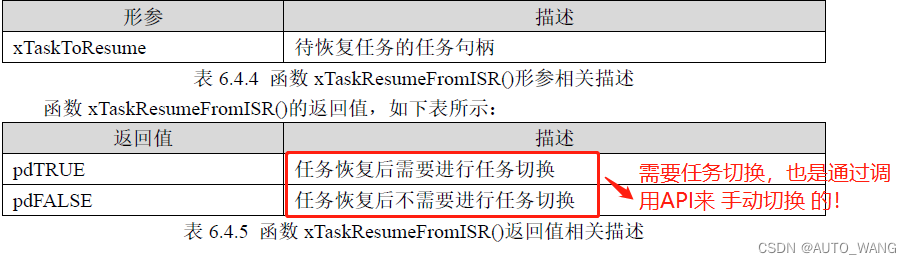
4、运行任务的切换 :
在
中断中恢复任务 后,函数如果 返回pdTRUE ,代表恢复的任务优先级比较高, 需要手动切换执行 。这时候可以调用FreeRTOS提供的特殊函数来实现任务切换。 函数原型如下 : void portYIELD_FROM_ISR(BaseType_t xYieldRequired) ; // 实际上是一个宏定义函数,最终调用portYIELD() |
六、FreeRTOS中断管理
:
|
1、ARM Cortex-M系列的中断 :
ARM Cortex-M的NVIC最大可
支持 256 个中断源,其中包括 16 个系统中断和 240 个外部中断 ;然而 芯片厂商一般情况下都用不完这些资源 ,以正点原子的战舰开发板为例,所使用的 STM32F103ZET6 芯片 就只用到了10个系统中断和60个外部中断。 中断优先级管理 :
在NVIC的相关结构体中,成员
变量 IP 用于配置外部中断 的优先级,成员变量IP的 定义如下所示 :ARM Cortex-M 使用了8 位宽的寄存器来配置中断的优先等级,这个寄存器就是中断优先级配置寄存器,因此 最大中断的优先级配置范围位 0~255 。
但是芯片厂商一般用不完这些资源,
对于 STM32 ,只用到了中断优先级配置寄存器的高4 位[7:4],低四位[3:0]取零处理,因此STM32 提供了最大2^4=16 级的中断优先等级, 如下图所示 : STM32 的中断优先级可以分为 抢占优先级和子优先级 。 
三个 系统中断优先级 配置寄存器 :
除了外部中断,
系统中断有独立的中断优先级配置寄存器 ,分别为 SHPR1 、 SHPR2 、 SHPR3 ,下面就分别来看一下这三个寄存器的作用。 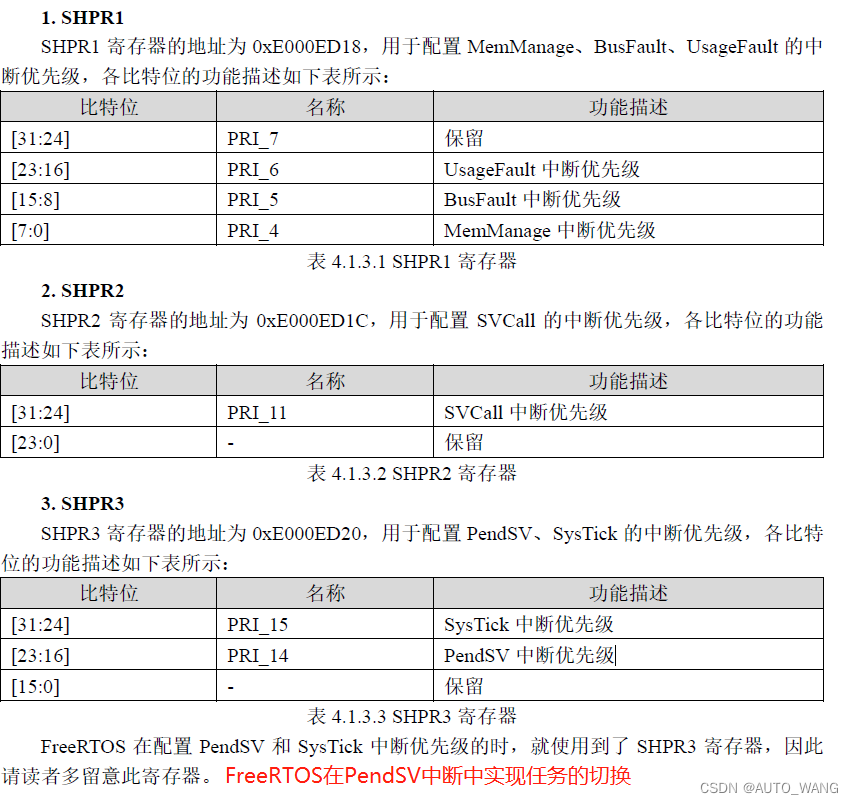
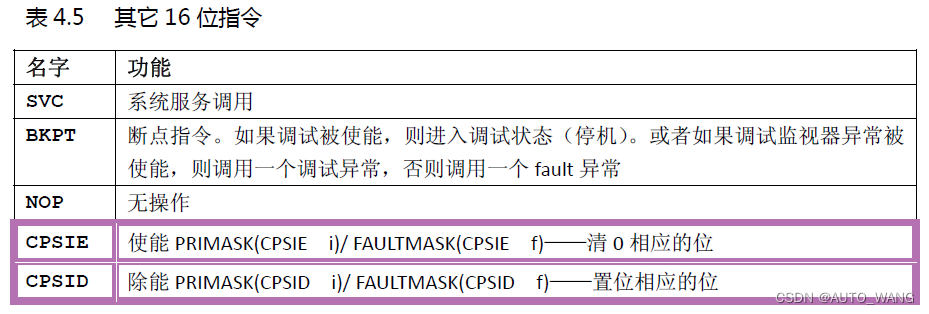
三个 中断屏蔽 寄存器 :
ARM Cortex-M有三个用于屏蔽中断的寄存器,分别为
PRIMASK 、 FAULTMASK 和 BASEPRI ,下面就分别来看一下这三个寄存器的作用。 PRIMASK :PRIMASK寄存器有32bit,但只有bit0有效,是可读可写的,将PRIMASK寄存器设置为1用于 屏蔽除 NMI 和 HardFault 外 的所有异常和中断,将PRIMASK寄存器清0用于使能中断。 FAULTMASK :FAULTMASK寄存器有32bit,但只有bit0有效,也是可读可写的,将FAULTMASK寄存器设置为1用于屏蔽 除 NMI 外的所 有异常和中断,将FAULTMASK寄存器清零用于使能中断。 BASEPRI :BASEPRI有32bit,但只有 低 8 位 [7:0] 有效 ,也是可读可写的;BASEPRI寄存器比起PRIMASK和FAULTMASK寄存器直接屏蔽掉大部分中断的方式,BASEPRI寄存器的功能显得更加细腻,BASEPRI 用于设置一个中断屏蔽的阈值 ,设置好BASEPRI后, 中断优先级低于 BASEPRI 的中断就都会被屏蔽掉 ; FreeRTOS 就是使用 BASEPRI 寄存器来管理受 FreeRTOS 管理的中断的 。 中断控制状态寄存器 :
中断控制状态寄存器(
ICSR )的地址为0xE000ED04,用于设置和清除异常的挂起状态,以及获取当前系统正在执行的异常编号, 各比特位的功能描述如下表所示 : 
这个寄存器主要关注 VECTACTIVE 段 [8:0] ,通过读取 VECTACTIVE 段就能够判断当前执行的代码是否在中断中( FreeRTOS的中断判断原理 ) 。 2、FreeRTOS中断管理详解 : PendSV和SysTick中断优先级的实现 :
FreeRTOS使用SHPR3寄存器配置PendSV和SysTick的中断优先级,那么FreeRTOS是如何配置的呢?
在 FreeRTOS 的源码中有如下定义 : 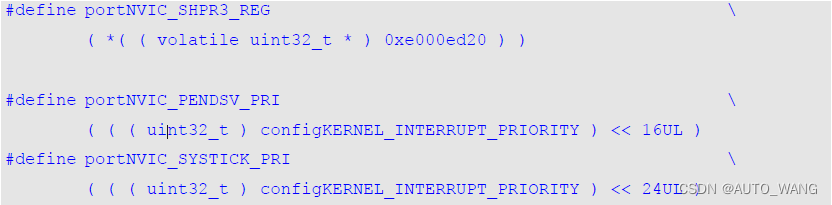
接着FreeRTOS
在启动任务调度器的函数 中设置了PendSV和SysTick的中断优先级, 代码如下所示 : 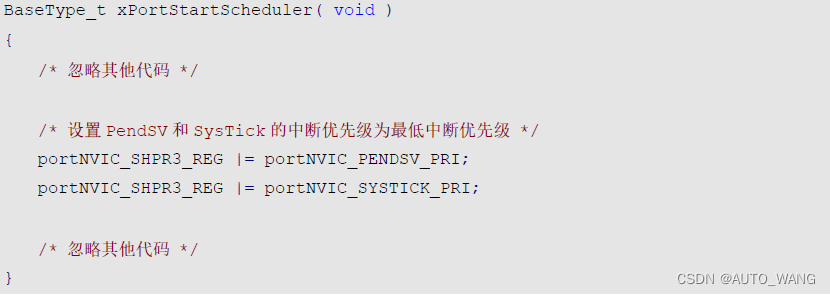
FreeRTOS中断的屏蔽与启用 :
FreeRTOS
使用 BASEPRI 寄存器 来管理受FreeRTOS管理的中断,而不受FreeRTOS管理的中断不受FreeRTOS开关中断的影响,那么FreeRTOS开关中断是如何操作的呢?首先来看一下 FreeRTOS 开关中断的宏定义,代码如下所示 : 

屏蔽中断函数vPortRaiseBASEPRI() : 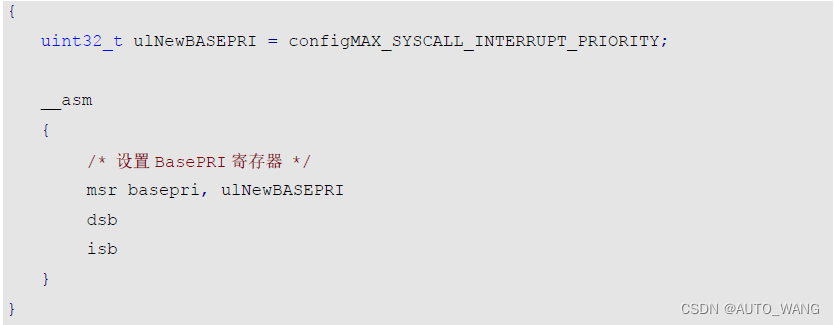
解除屏蔽函数vPortSetBASEPRI(0) : 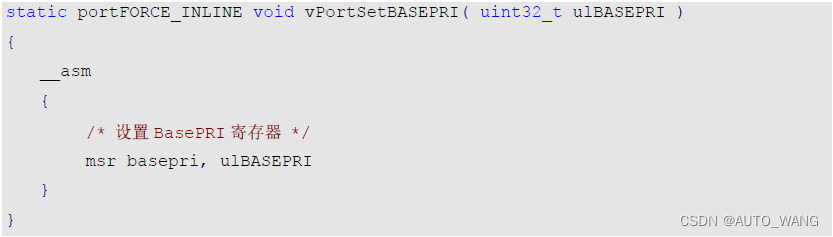
FreeRTOS进出临界区 :
临界区是指那些必须完整运行的区域,在
临界区中的代码必须完整运行,不能被打断 ;例如一些使用软件模拟的通信协议,通信协议在通信时,必须严格按照通信协议的时序进行,不能被打断。 FreeRTOS 在进出临界区的时候,通过关闭和打开受 FreeRTOS 管理的中断,以保护临界区中的代码 ;FreeRTOS的源码中就包含了许多临界区的代码,这部分代码都是用临界区进行保护,用户在使用FreeRTOS编写应用程序的时候,也要注意一些不能被打断的操作,并为这部分代码加上临界区进行保护。
对于进出临界区,FreeRTOS的源码中有四个相关的宏定义,分别为
taskENTER_CRITICAL() 、 taskENTER_CRITICAL_FROM_ISR() 、 taskEXIT_CRITICAL() 、 taskEXIT_CRITICAL_FROM_ISR(x) ,这四个宏定义分别用于在中断和非中断中进出临界区, 定义代码如下所示 : 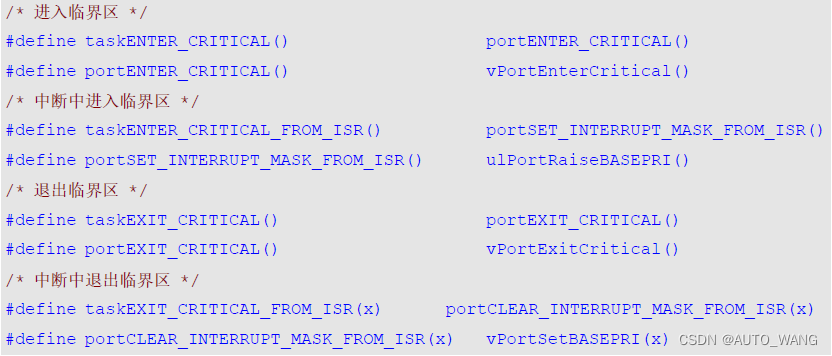
任务级的进出临界区允许嵌套,但
中断级的不允许嵌套 !! 任务调度器的挂起与恢复 :
这是是对整个任务调度器的操作,
调度器被挂起 ,意味这 任务将无法切换 ,但是 不需要关闭中断 ;函数只能在任务中被调用, 不能在中断处理函数中使用 ; 具体函数如下 :
①
vTaskSuspendAll() //挂起任务调度器;仅仅防止任务之间的资源争夺, 中断仍然可以响应 ;支持嵌套使用。
②
vTaskResumeAll() //恢复任务调度器,在任意任务中调用;需要 和挂起函数成对出现 ; 返回值 为bpTRUE则不需要手动任务切换,为pdFALSE则需要手动切换任务( portYIELD_WITHIN_API ) 。 |
七、FreeRTOS的列表与列表项
:
|
1、列表与列表项简介 : 列表(List) :列表是FreeRTOS中最基本的一种数据结构,其在物理存储单元上是非连续、非顺序的;列表在FreeRTOS中的应用十分广泛,要注意的是, FreeRTOS 中的列表是一个双向链表 ,在list.h文件中,有列表的相关定义, 具体代码如下所示 : 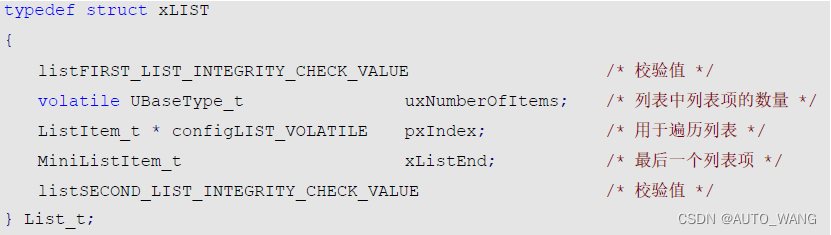
参数解释 :
① 包含了两个宏,分别为
listFIRST_LIST_INTEGRITY_CHECK_VALUE 和 listSECOND_LIST_INTEGRITY_CHECK_VALUE ,这两个宏用于存放确定已知常量,FreeRTOS通过 检查这两个常量的值,来判断列表的数据在程序运行过程中,是否遭到破坏 ;类似这样的宏定义在列表项和迷你列表项中也有出现; 该功能一般用于调试,默认是不开启的 。
② 成员变量
uxNumberOfItems 用于记录列表中 列表项的个数( 不包含 xListEnd ) ,当往列表中插入列表项时,该值加1;当从列表中移除列表项时,该值减1。
③ 成员变量
pxIndex 用于指向列表中的 某个列表项 ,一般 用于遍历列表中的所有列表项 。
④ 成员变量
xListEnd 是一个迷你列表项;列表中迷你列表项的值 一般被设置为最大值 , 用于将列表中的所有列表项按升序排序时,排在最末尾 ;同时xListEnd 也用于挂载其他插入到列表中的列表项 。 结构示意 : 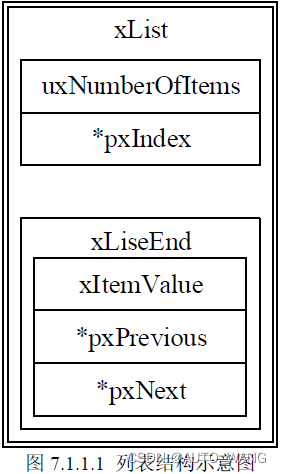
列表项(List Item) :列表项是用于指向一个数据的列表中的节点,在list.h 文件中,有列表项的相关定义, 具体代码如下所示 : 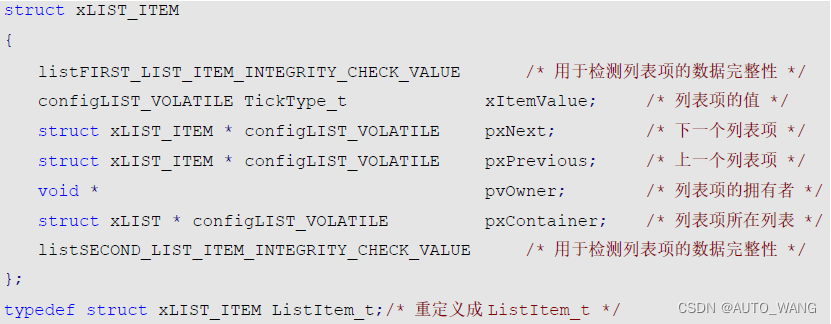
参数解释 :
① 如同列表一样,列表项中也包含了两个用于检测列表项数据完整性的宏定义。
② 成员变量
xItemValue 为列表项的值,这个值 多用于按升序对列表中的列表项进行排序 。
③ 成员变量
pxNext 和 pxPrevious 分别用于指向列表中 列表项的下一个列表项和上一个列表项 。
④ 成员变量
pxOwner 用于 指向包含列表项的对象( 通常是任务控制块 ) ,因此,列表项和包含列表项的对象之间存在双向链接。
⑤ 成员变量
pxContainer 用于指向 列表项所在列表 。 结构示意图 : 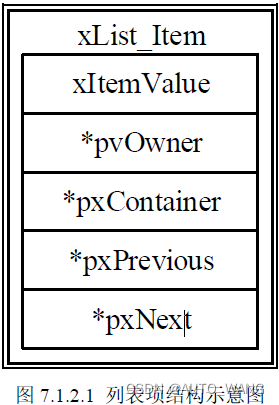
迷你列表项(Mini List Item) :迷你列表项也是列表项,但迷你列表项 仅用于标记列表的末尾和挂载其他插入列表中的列表项 , 用户是用不到迷你列表项的 ;在list.h 文件中,有迷你列表项的相关定义, 具体的代码录下所示 : 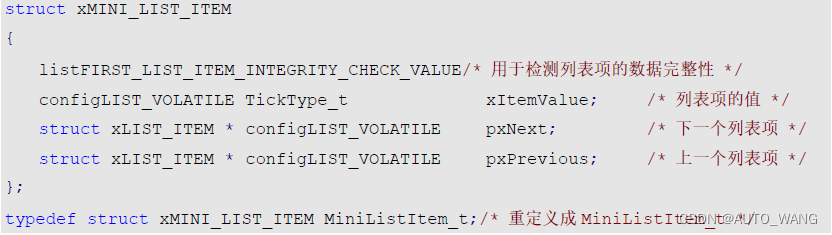
参数解释 :
① 迷你列表项中也同样包含用于检测列表项数据完整性的宏定义。
② 成员变量
xItemValue 为列表项的值( 通常配置为最大值 ),这个值多用于按升序对列表中的列表项进行排序。
③ 成员变量
pxNext 和 pxPrevious 分别用于指向列表中 列表项的下一个列表项和上一个列表项 。 结构示意 : 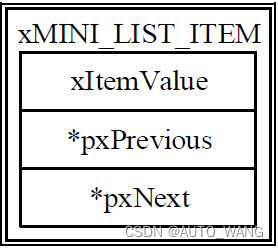
2、相关的API函数 : 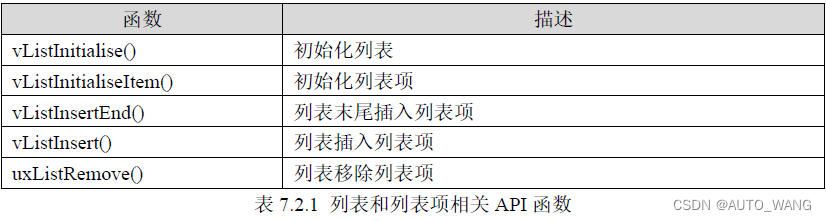
初始化列表 :函数 vListInitialise ()
此函数用于初始化列表,在定义列表之后,需要先对其进行初始化,只有初始化后的列表,才能够正常地被使用;列表初始化的过程,其实就是初始化列表中的成员变量。
函数原型如下所示 : 函数的实现源码如下 : 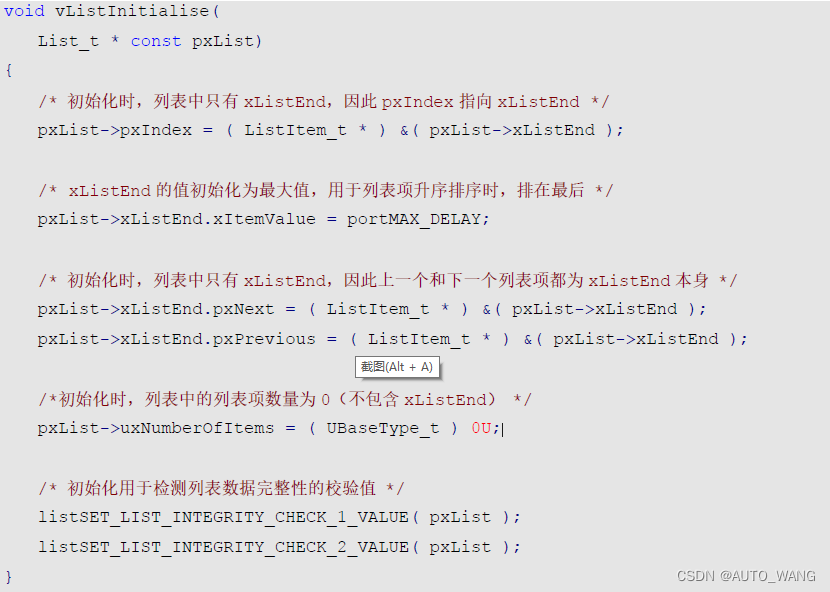
初始化列表项 :函数 vListInitialiseItem ()
此函数用于初始化列表项,如同列表一样,在定义列表项之后,也需要先对其进行初始化;只有初始化好的列表项,才能够被正常地使用;列表项初始化的过程,也是初始化列表项中的成员变量。
函数原型如下所示 : 函数的实现源码如下 : 
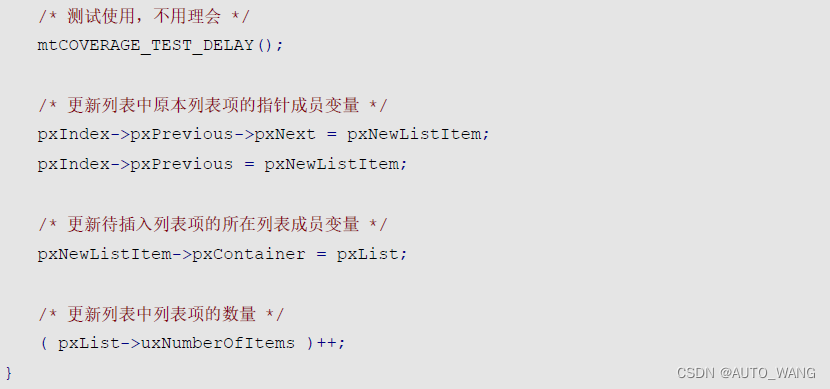
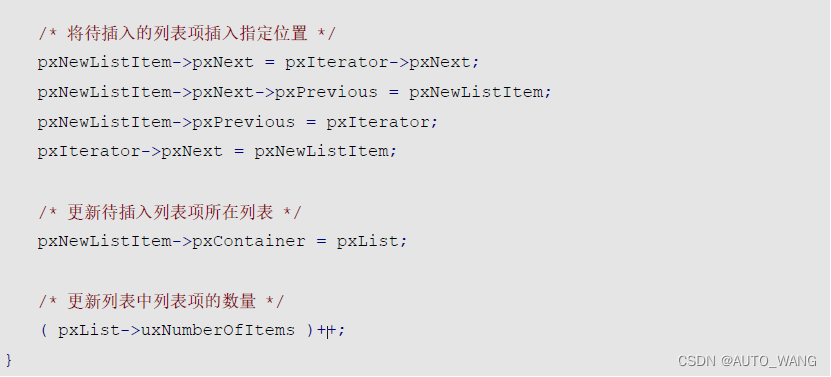
列表项的无序插入 :函数 vListInsertEnd ()
此函数用于将待插入列表的列表项
插入到列表 pxIndex 指针指向列表项的前面 ,是一种 无序的插入方法 。 函数原型如下所示 : 
函数的实现源码如下 : 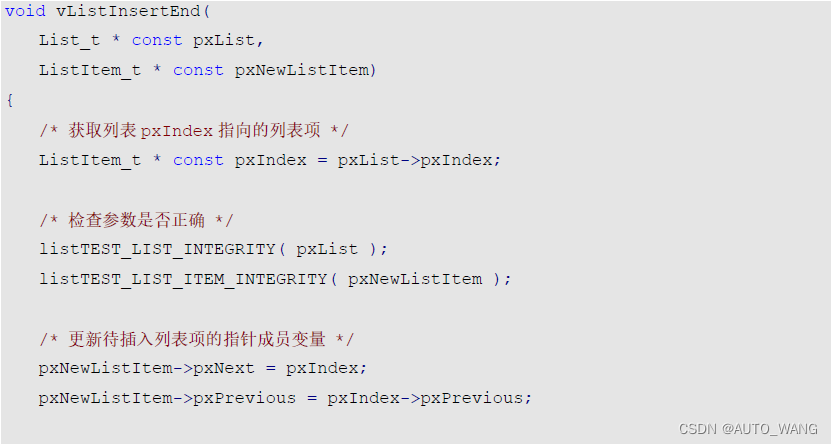
列表项升序插入 :函数 vListInsert ()
此函数用于将待插入列表的列表项
按照列表项值升序排序 的顺序,有序地插入到列表中。 函数原型如下所示 : 
函数的实现源码如下 : 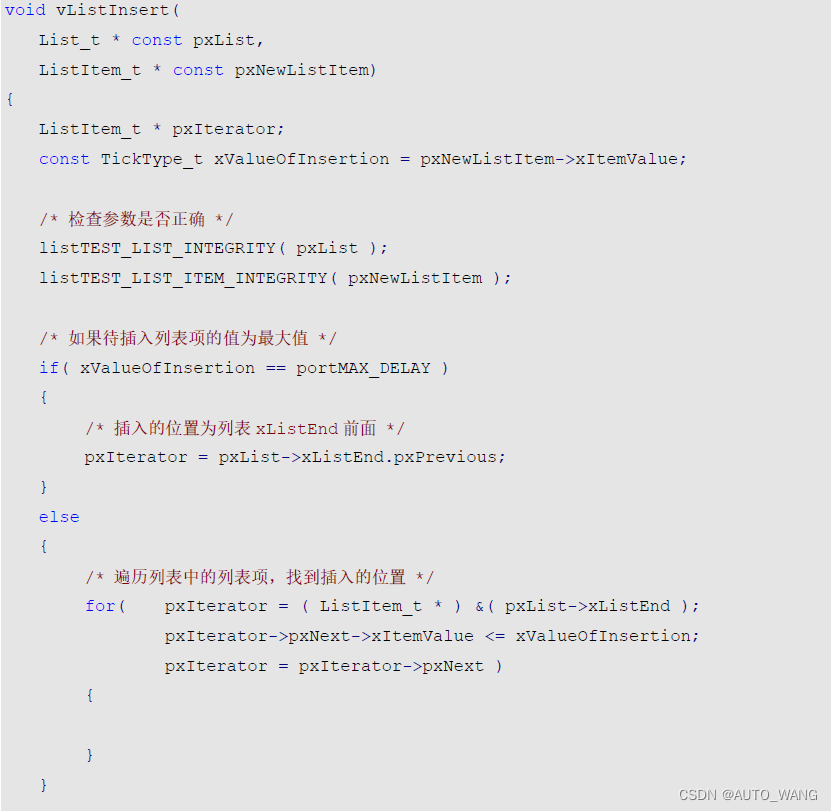
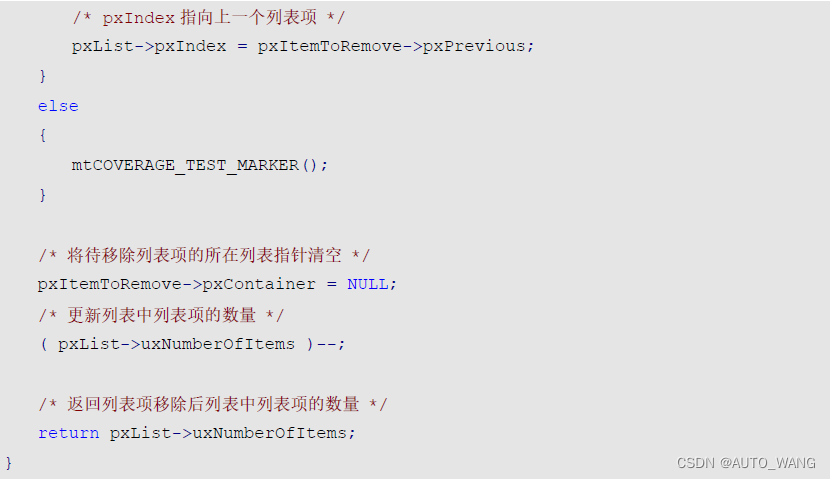
从列表中删除列表项 :函数 uxListRemove ()
此函数用于将列表项从列表项所在列表中移除,
函数原型如下所示 : 
函数的实现源码如下 : 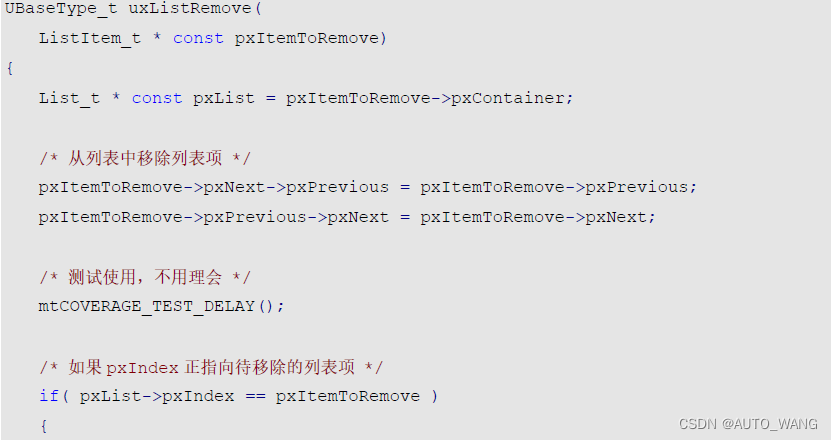
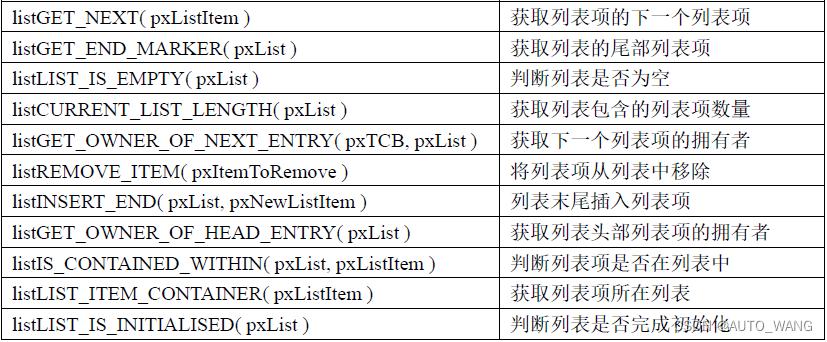
3、其他用于操作列表和列表项的宏 : 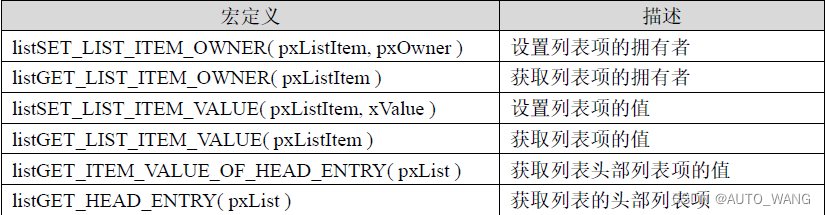
|
八、FreeRTOS启动与任务底层原理解析
:
|
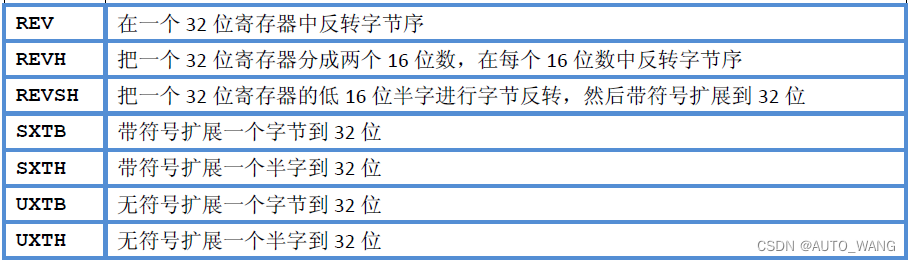
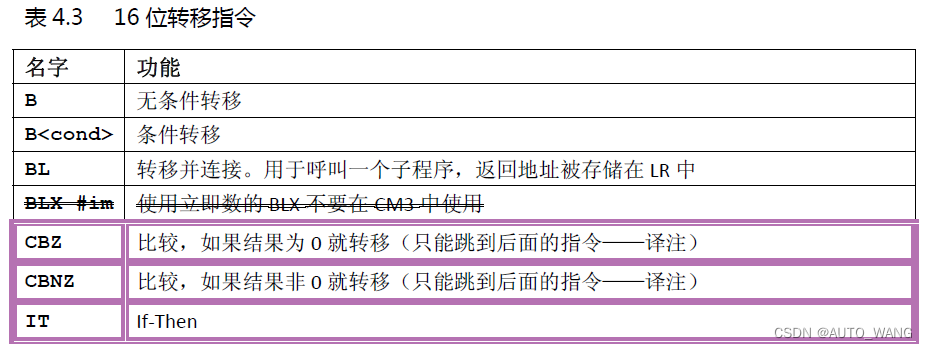
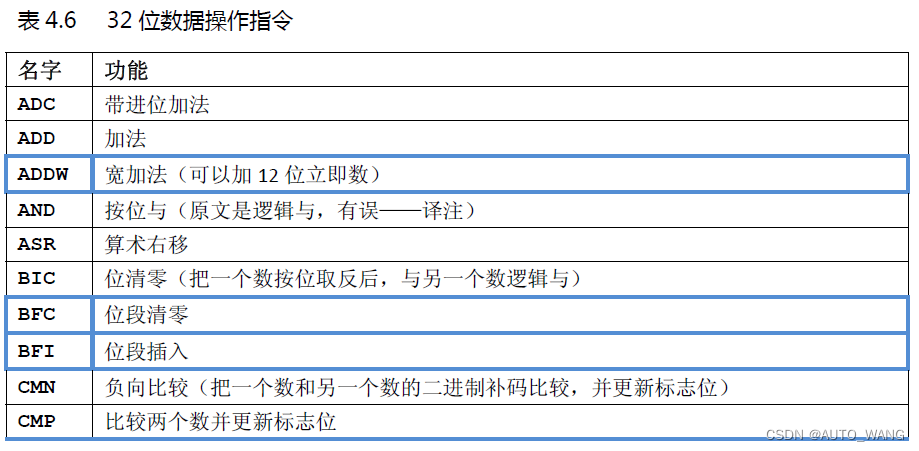
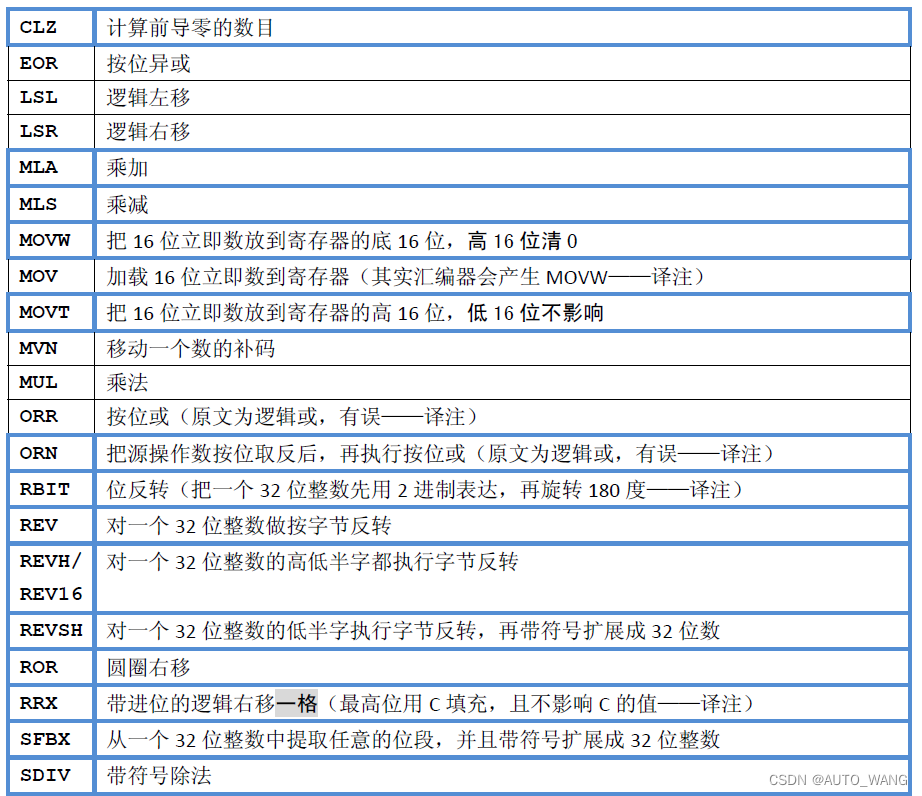
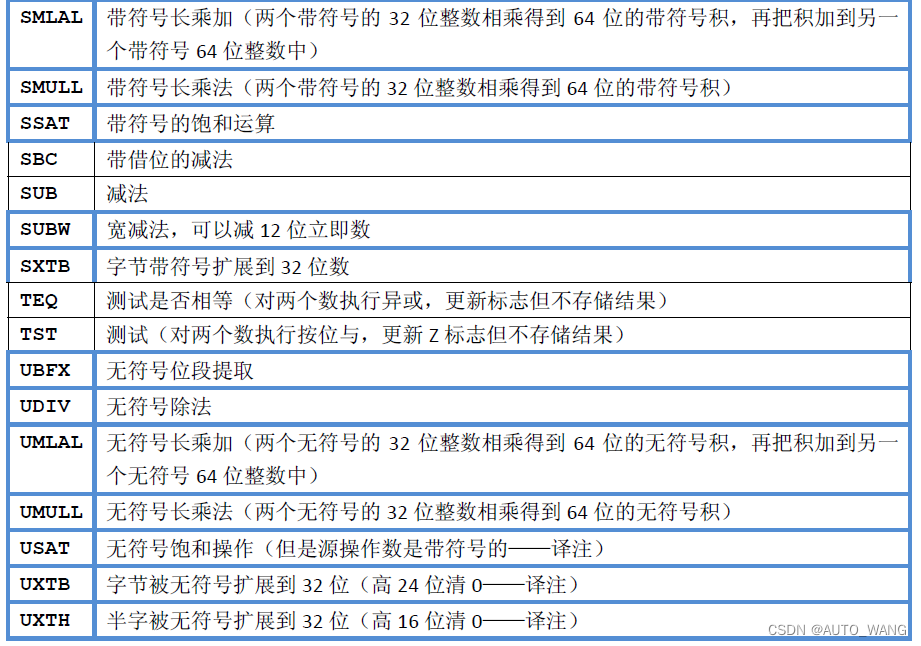
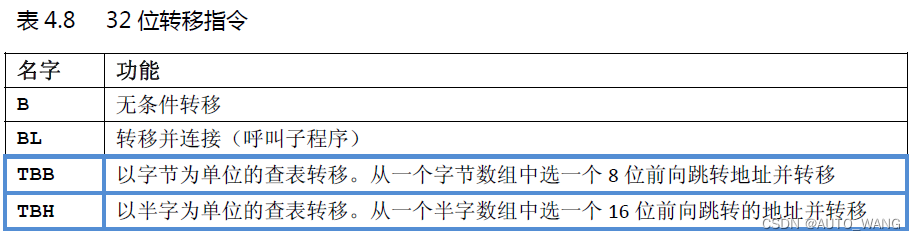
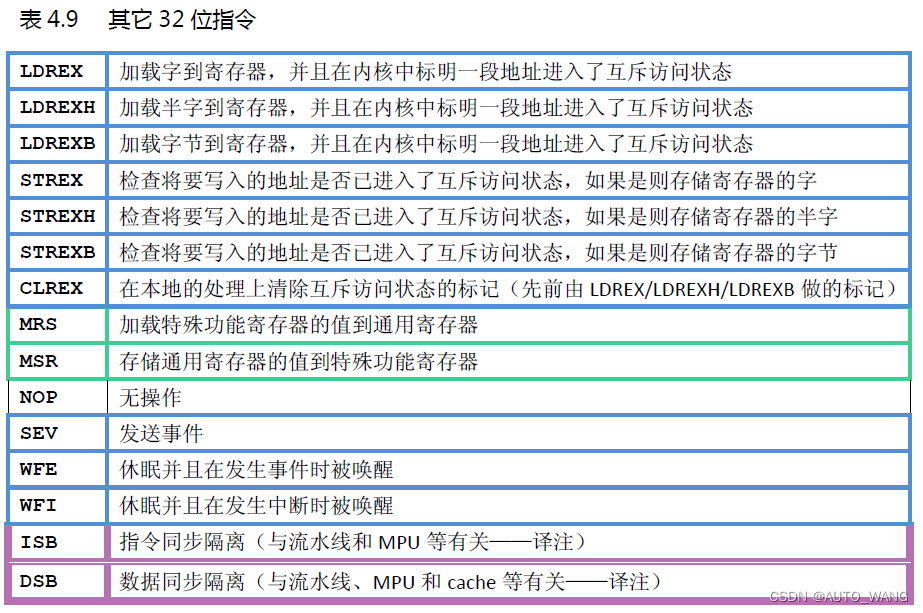
1、ARM的汇编指令集列表( 来自《Cortex-M3权威指南》 ) : 边框加粗的是从 ARMv6T2 才支持的指令。 双线边框的是从 Cortex‐M3 才支持的指令( v7 的其它款式不一定支持) 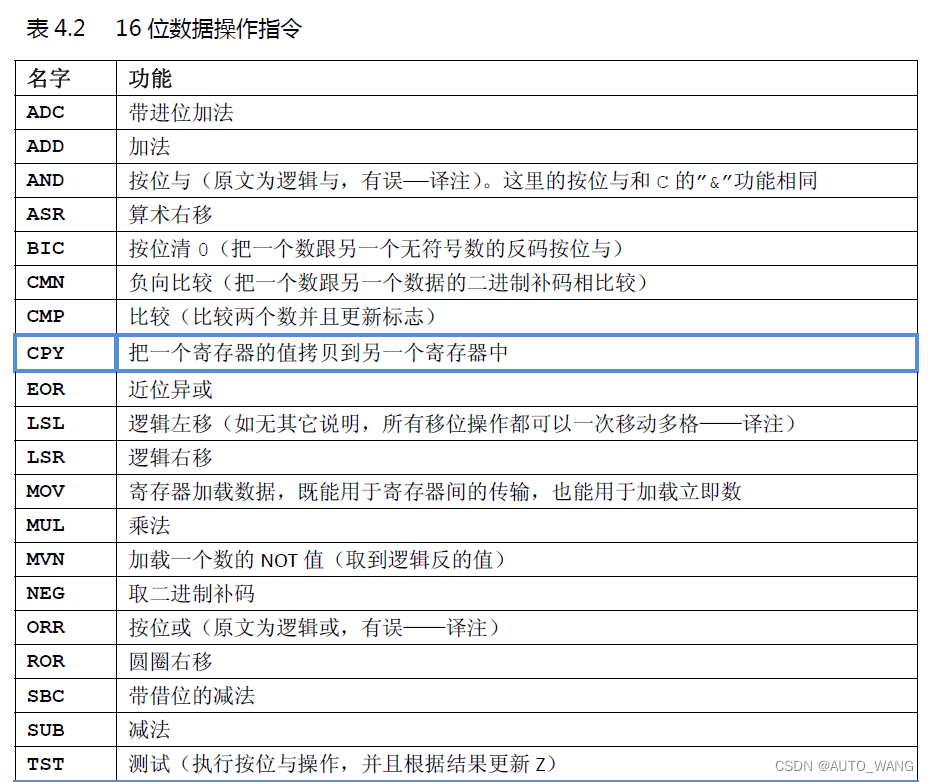



//
2、开启任务调度器 :
这里
总结性的描述整体过程 ,具体的源码分析 参考《FreeRTOS开发指南》第八章 。
①
创建 空闲任务 和 定时器任务( 如果配置启动软件定时器的话 );
②
关闭全局中断 ,防止中断打断启动进程;
③
初始化FreeRTOS的全局变量 ,包括任务阻塞超时时间、FreeRTOS任务调度器状态等;
④
调用硬件平台相关函数 ,初始化 systick和pendsvc中断,初始化 进入临界区的计数器为0;
⑤ 初始化MSP指针到堆栈起始地址,启动全局中断,并触发一次SVC中断(
ARM汇编 );
⑥
找到就绪任务中优先级最高的任务 ,将堆栈的寄存器信息恢复到CPU的寄存器中,配置启用PSP指针,配置PC指针指向任务函数,开始执行任务( ARM汇编 )。
//
3、任务状态列表 :
在开始介绍FreeRTOS中任务相关的API函数之前,先介绍一下FreeRTOS中的任务状态列表,前面章节说了,
FreeRTOS 中的任务无非就四种状态,分别为运行态、就绪态、阻塞态和挂起态,这四种状态中,除了运行态,其他三种任务状态的任务都有其对应的任务状态列表 ;FreeRTOS使用这些任务状态列表来管理处于不同状态的任务。任务状态列表在task.c文件中有定义, 具体的定义代码如下所示 : 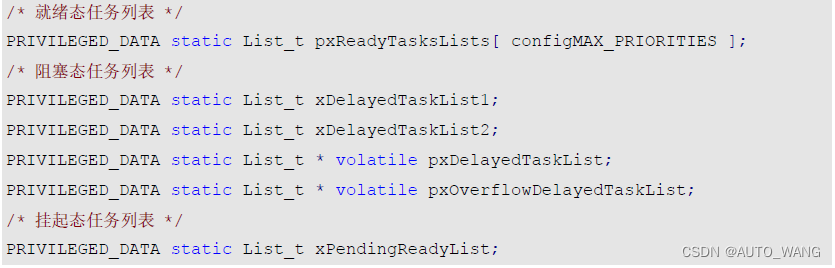
① 就绪态列表 ,从定义可以看出,就绪态任务列表,从定义中可以看出,就绪态任务列表是一个数组,数组中元素的个数由宏configMAX_PRIORITY确定,宏configMAX_PRIORITY为配置的系统最大任务优先级。由此可见,FreeRTOS为每个优先等级的任务都分配了一个就绪态任务列表。 ② 阻塞态任务列表 ,阻塞态任务列表 一共有两个 ,分别为是阻塞态任务列表1和阻塞态任务列表2,并且该有两个阻塞态任务列表指针;这么做是为了解决任务阻塞时间溢出的问题,这个会在后续讲解阻塞相关的内容时,具体分析。 ③ 挂起任务列表 ,被挂起的任务就会被添加到挂起态任务列表中。
//
4、任务创建函数解析( vTaskCreate() ) : 函数接口原型 : 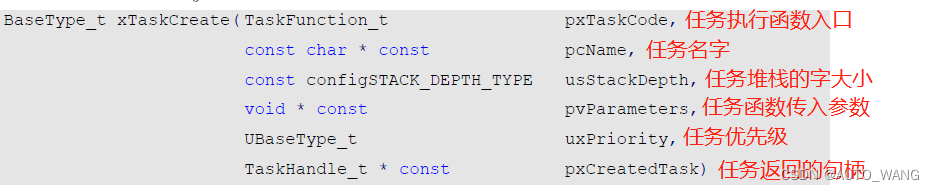
过程解析 :
① 函数xTaskCreate()创建任务,首先
为任务的任务控制块以及任务栈空间申请内存 ,如果任务控制块或任务栈空间的内存申请失败,则释放已经申请到的内存,并返回内存申请失败的错误。
②
调用函数prvInitialiseNewTask() 初始化任务控制块中的成员变量,包括任务函数指针、任务名、任务栈大小、任务函数参数、任务优先级等。
③ 然后
调用函数prvAddNewTaskToReadyList() ,将任务添加到对应优先级的就绪任务列表中。
///
5、任务删除函数解析( vTaskDelete() ) : 函数接口原型 : 
过程解析 :
① 使用vTaskDelete()删除任务时,
需要考虑两种情况 ,分别为 待删除任务不是当前正在运行的任务 (调用该函数的任务)和 待删除任务为当前正在运行的任 务 (调用该函数的任务)。第一种情况比较简单,当前正在运行的任务可以直接删除待删除任务;而第二种情况下,待删除任务时无法删除自己的,因此需要将当前任务添加到任务待删除列表中,空闲任务会处理这个任务待删除列表,将待删除的任务统一删除。
② 在待删除任务不是当前正在运行的任务这种情况下,当前正在运行的任务可以删除待删除的任务,因此调用了函数prvDeleteTCB(),将待删除的任务删除。
///
6、挂起任务函数解析( vTaskSuspend() ) : 函数接口原型 : 
过程解析 :
① 任务句柄将会从就绪态被转移到挂起态列表;
② 使用函数vTaskSuspend()挂起任务时,如果任务调度器没有运行,并且待挂起的任务又是调用函数vTaskSuspend()的任务,那么pxCurrentTCB需要指向其他优先级最高的就绪态任务;
更新 pxCurrentTCB 的操作是通过调用函数 vTaskSwitchContext() 实现的 。
③ 如果任务调度器正在运行,且将要挂起的任务正在运行,则需要切换任务。
///
7、恢复任务函数解析( vTaskResume() ) : 函数接口原型 : 
过程解析 :
① 将要恢复的任务从挂起列表恢复到就绪列表;
② 如果任务优先级高于当前正在运行的任务,则需要切换任务;
///
|
九、FreeRTOS任务切换原理
:
|
1、PendSV中断服务函数 : PendSV ( Pended Service Call ,可挂起服务调用 ),是一个对RTOS 非常重要的异常。PendSV 的中断优先级是可以编程的,用户可以根据实际的需求,对其进行配置; PendSV 的中断由将中断控制状态寄存器( ICSR )中 PENDSVSET 为置一触发 。PendSV 与SVC 不同, PendSV 的中断是非实时的,即 PendSV 的中断可以在更高优先级的中断中触发,但是在更高优先级中断结束后才执行 。 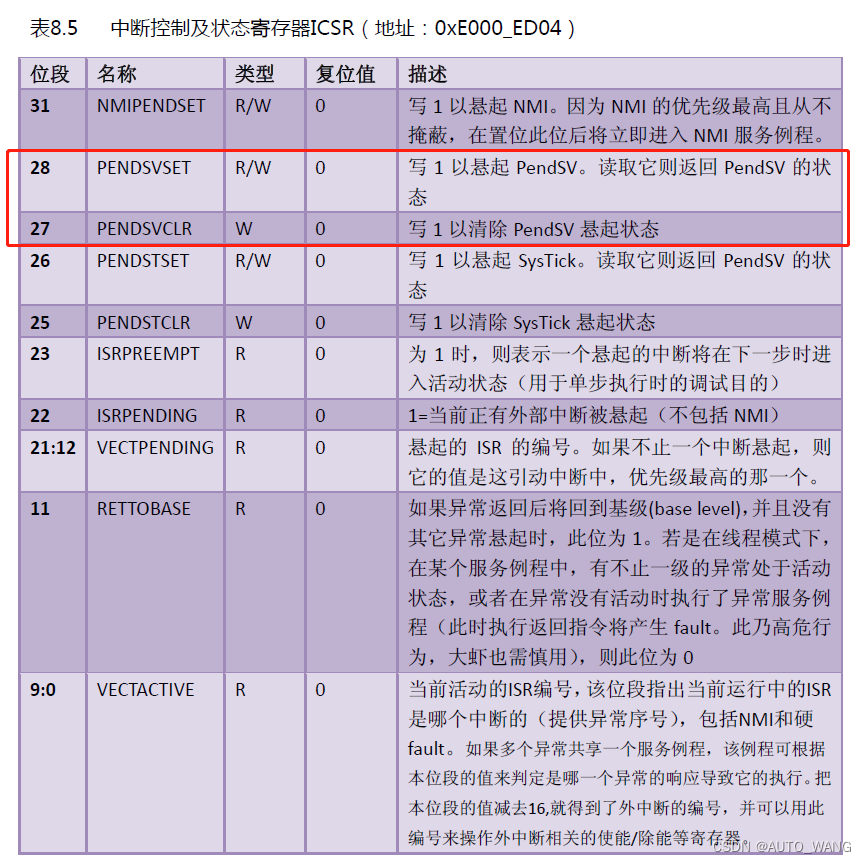
利用PendSV 的这个可挂起特性,
在设计 RTOS 时,可以将 PendSV 的中断优先级设置为最低的中断优先级; 这么一来, PendSV 的中断服务函数就会在其他所有中断处理完成后才执行。 任务切换时,就需要用到PendSV 的这个特性。 FreeRTOS中的函数原型 :__asm void xPortPendSVHandler ( void ) 函数执行过程解析 :
① R0寄存器保存当前执行任务的PSP指针(
CPU会在进入中断之前, 自动 保存部分寄存器到任务堆栈 );
② R2保存了任务控制块栈顶指针成员的地址;
③ 利用RO寄存器中PSP指针位置,
手动 将R4~R11寄存器的值入栈到任务堆栈中;
④ 保存当前PSP指针最新堆栈位置到任务控制块的栈顶指针成员变量中;
⑤ 保存R3和R14的值到MSP指针中,一会要用(
R3保存的是当前执行任务控制块变量的地址 );
⑥ 屏蔽FreeRTOS所管理的所有中断;
⑦ 调用
函数vTaskSwitchContext( )查找下一个任务控制块;
⑧ 重新取消中断屏蔽,从MSP寄存器中恢复R3和R14寄存器(
此时R3所指的实际任务控制块已经被替换了 );
⑨ R1获取到R3所指的任务控制块对象地址;
⑩ R0获取R1中的任务栈顶指针,接着将任务堆栈中的内存出栈到R4~R11中;
11)设备PSP指针执行新的任务堆栈位置;
12)触发PC指针,开始切换执行新的任务;
2、任务选择函数vTaskSwitchContext() : 函数原型 :void vTaskSwitchContext ( void ) 函数运行解析 :
① 判断任务调度器是否运行,如果没运行则标记需要启动,并重复调用PandSV直到运行;
② 调用宏函数taskSELECT_HIGHEST_PRIORITY_TASK()实现具体动作;
③ 通过
优先级就绪任务变量的bit位 ,找到存在就绪任务的最高优先级列表并返回;
④ 根据返回的优先级,确认对应列表中是否有就绪任务;
⑤ 从列表中找出尾节点的下个任务的控制块,并返回作为新的执行任务;
3、同等优先级任务时间片轮询的原理 :
在FreeRTOSConfig.h中,需要
配置 configUSE_PREEMPTION=1 和 configUSE_TIME_SLICING=1 ,才可以使能时间片调度;且时间片调度算法 只能发生在任务优先级相同的任务之间 。 4、个人总结( 重要 ) :
在FreeRTOS系统中,无论是
抢占式任务调度算法 还是 时间片轮询算法 ,其 主要路径是同一个 :都是通过systick中断触发pandSV中断,然后在中断中 先查看就序列表中,存在任务的最高优先级任务;如果优先级相同,则采取时间片轮询。 在其他情况下 ,如任务阻塞,挂起等,则通过 提前触发pandSV中断 来切换任务,并将 当前任务从就序列表中移除 。 |
版权声明:本文为weixin_40639467原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。