目录
第2章 空间描述和变换
2.1 引言
机器人操作:
通过某种机构使零件和工具在空间运动,而为了表达运动就必须要引入一个
世界坐标系
2.2 描述:位置 姿态 位姿
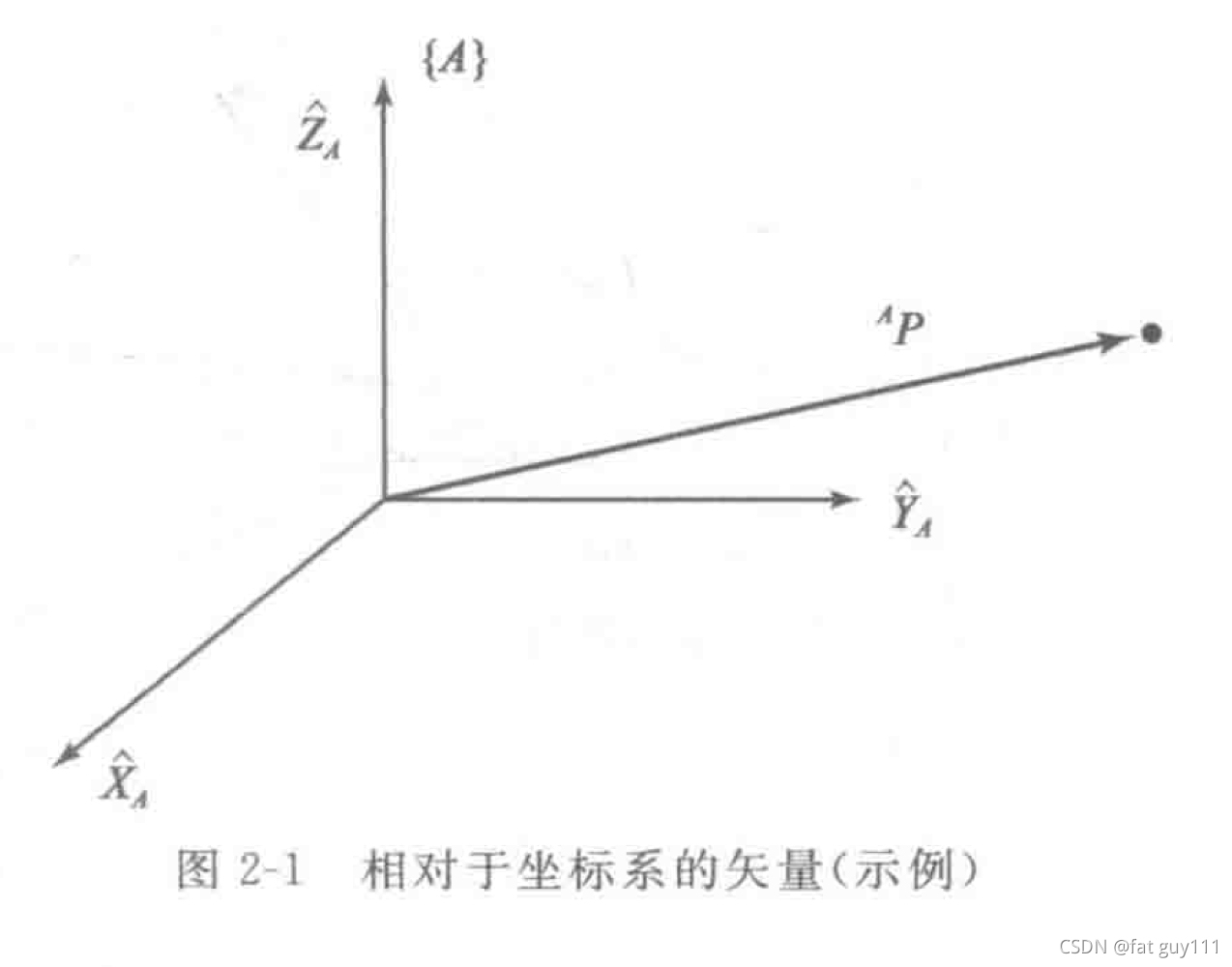
1.位置:
如图表示在坐标系里点p的位置
2.姿态:
旋转矩阵的表示
表示坐标系B主轴方向的单位向量相对于A坐标系的矢量
R是旋转矩阵,它表示{B}对于{A}的表达

记忆上述矩阵的技巧:第一行都有XA 第一列都有XB
即矩阵的行是{A}的单位矢量在{B}中的表达
重点:
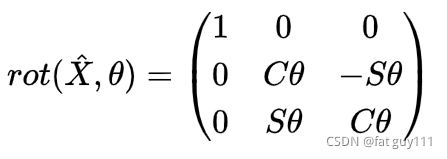
1.绕x轴旋转
角的矩阵
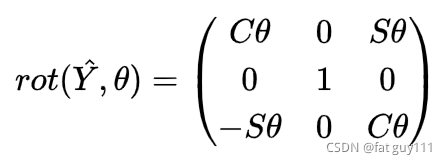
2.绕y轴旋转
角的矩阵
3. 绕z轴旋转
角的矩阵

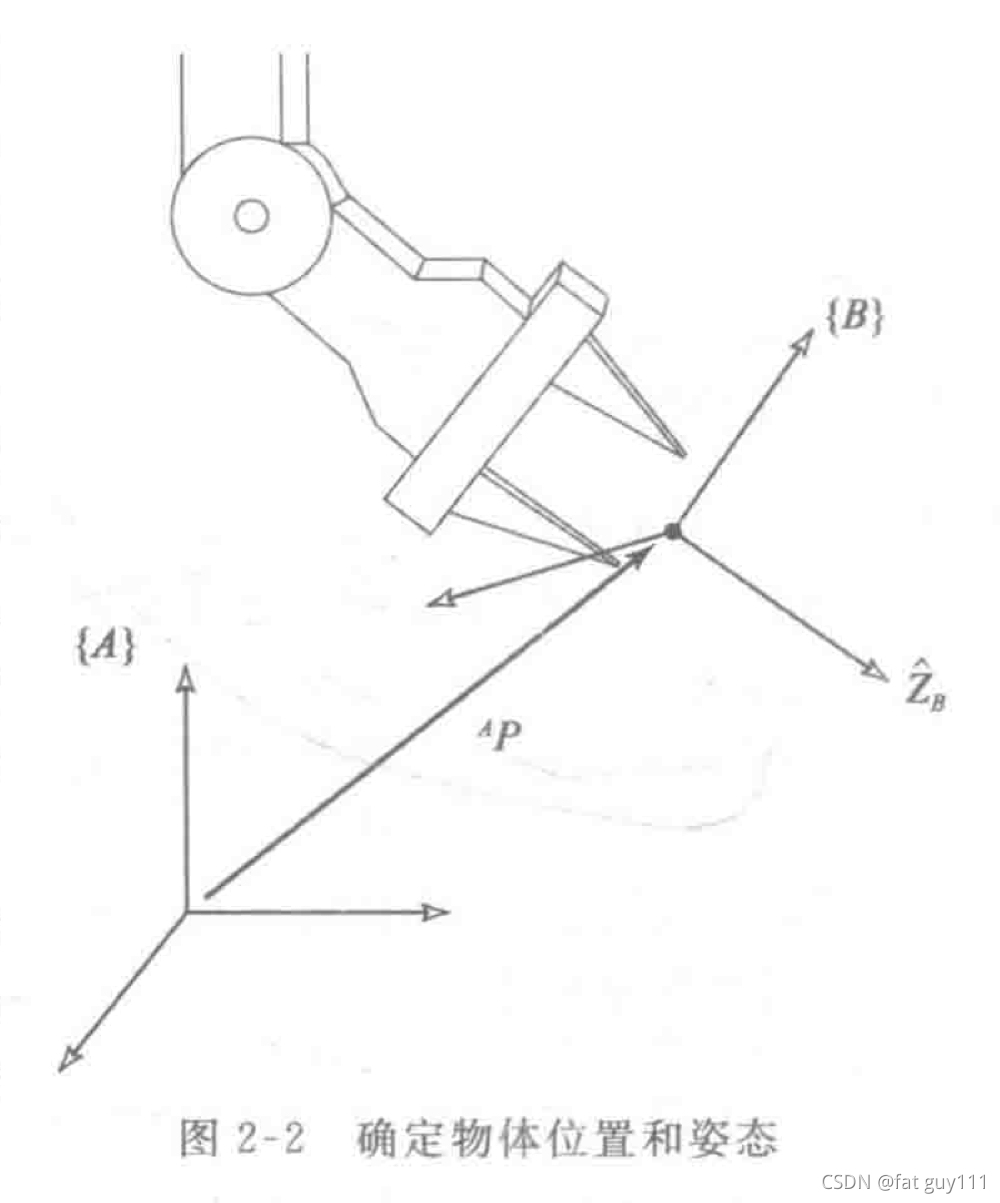
3.位姿:
位置和姿态的组合描述
![]()
其中前者是旋转矩阵,后者是确定位姿{B}的原点相对于{A}的位置

2.3 映射:从一个坐标系到另一个坐标系的变换
表示点P相对于A坐标系原点的位置矢量接下来的问题就是由已知的
求

1.坐标平移
![]()
2.坐标旋转
![]()
3.一般变换

坐标变换的结果如下
![]()
其中
表示B坐标系的坐标原点相对于A坐标系原点的位置矢量
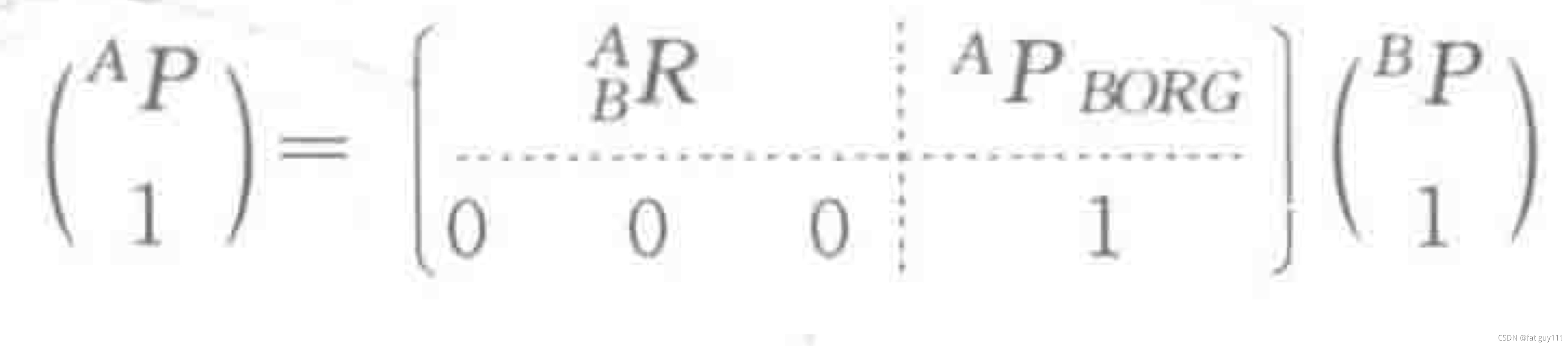
引入一个新的概念形式
![]()
上述形式用矩阵算子(齐次变换矩阵)可表示为
2.4 算子:平移,旋转和变换
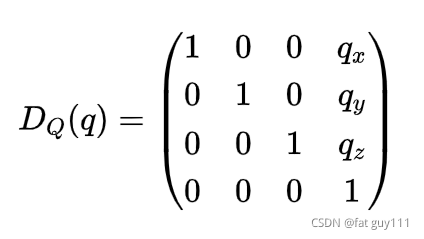
1.平移算子
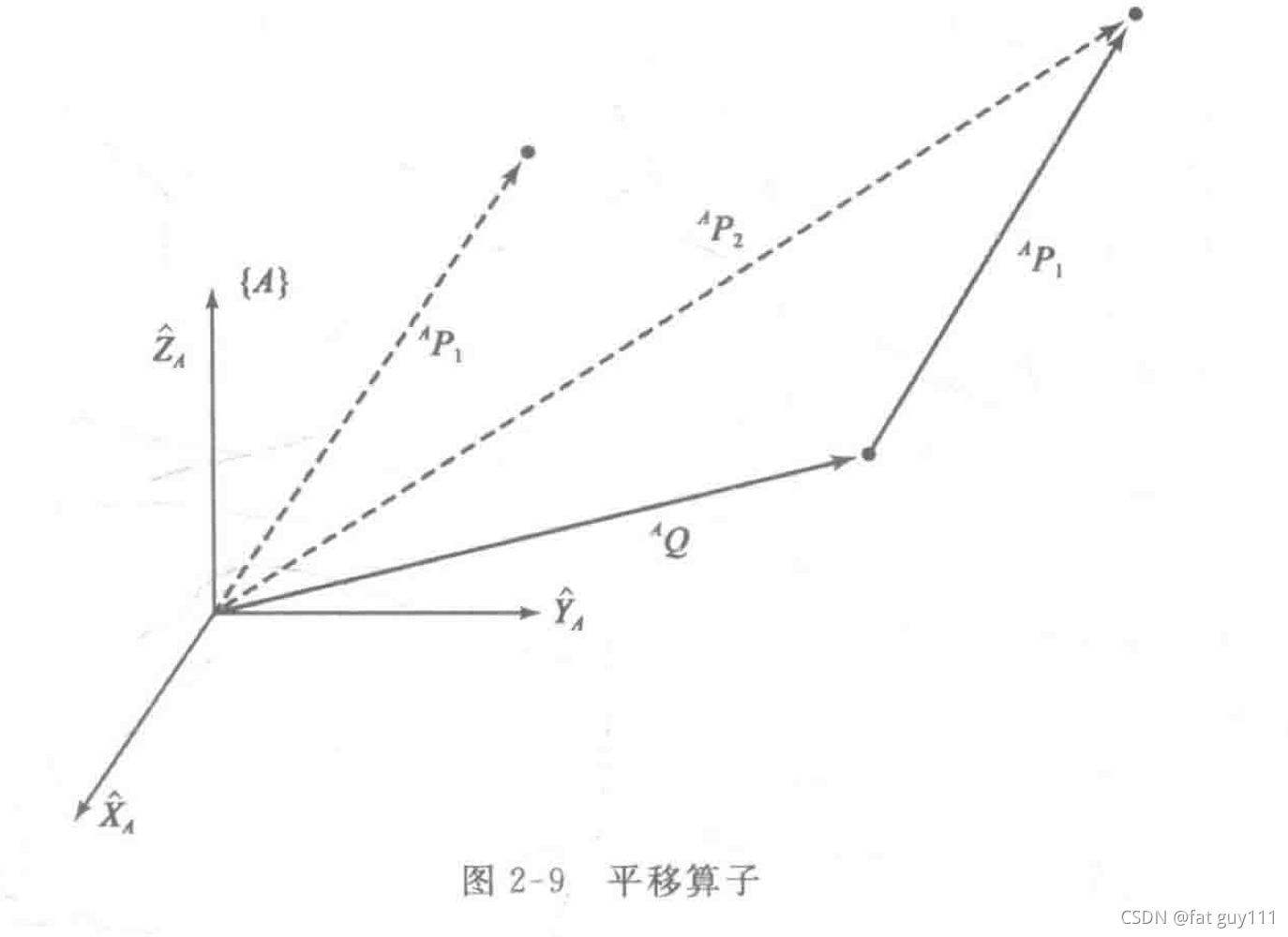
如图:
用矩阵算子写出平移变换,有:
其中,q是沿着矢量Q平移的数量,有符号,算子
可被看作一个特殊形式的齐次变换。
其中
,
和
是平移矢量Q的分量,并且有
2.旋转算子
旋转算子的一般形式为
用另一个符号定义旋转算子以明确的说明是绕哪个轴旋转的:
表示绕K轴旋转
角的旋转算子,以绕Z轴旋转的算子为例:
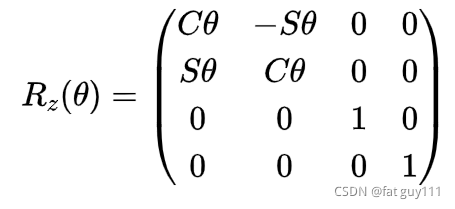
其中位置矢量的分量为0
3.变换算子
与矢量和旋转矩阵一样,坐标系还可以用变换算子来定义,算子T既包含了平移Q也包含了平移
2.5 总结和说明
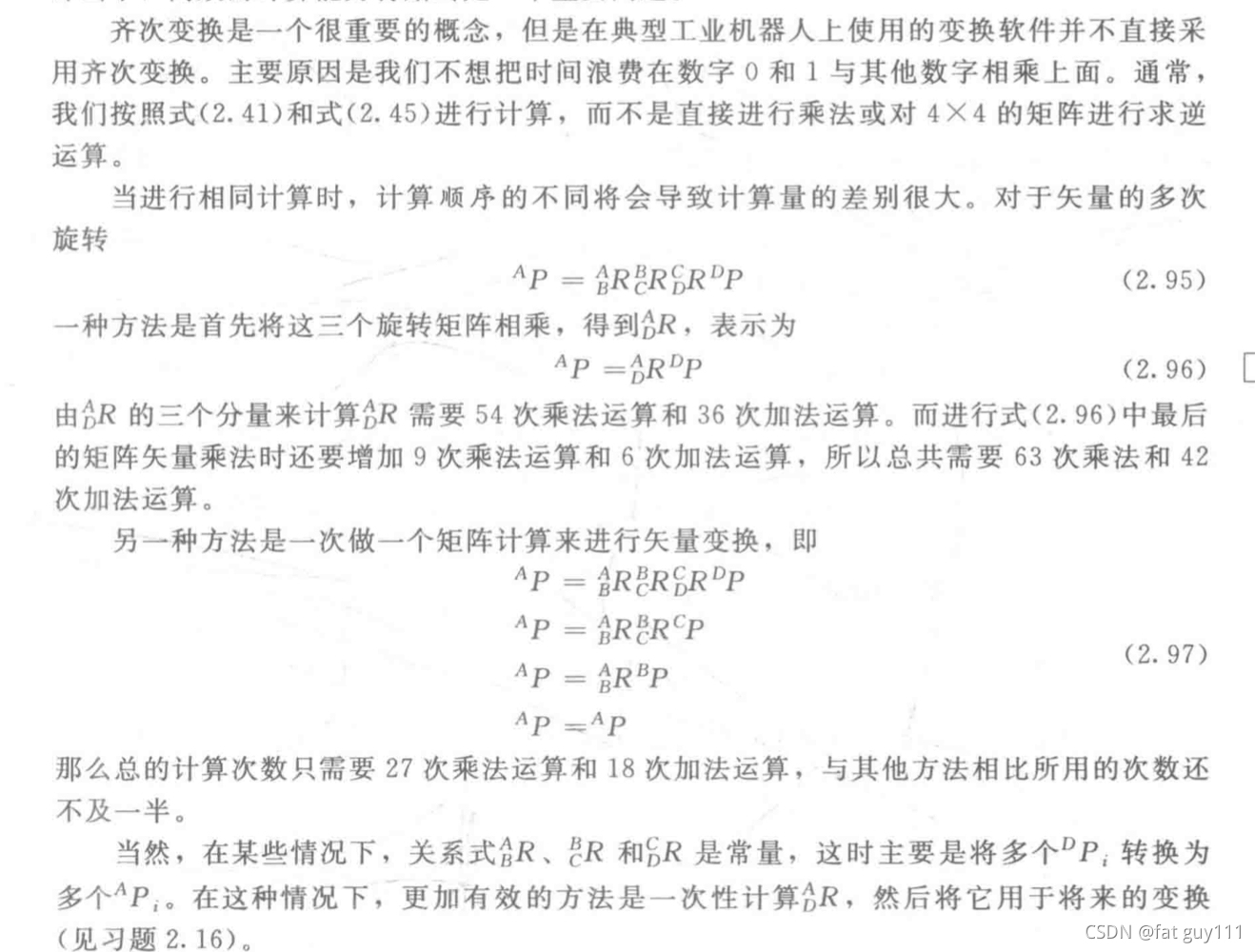
2.6变换的计算
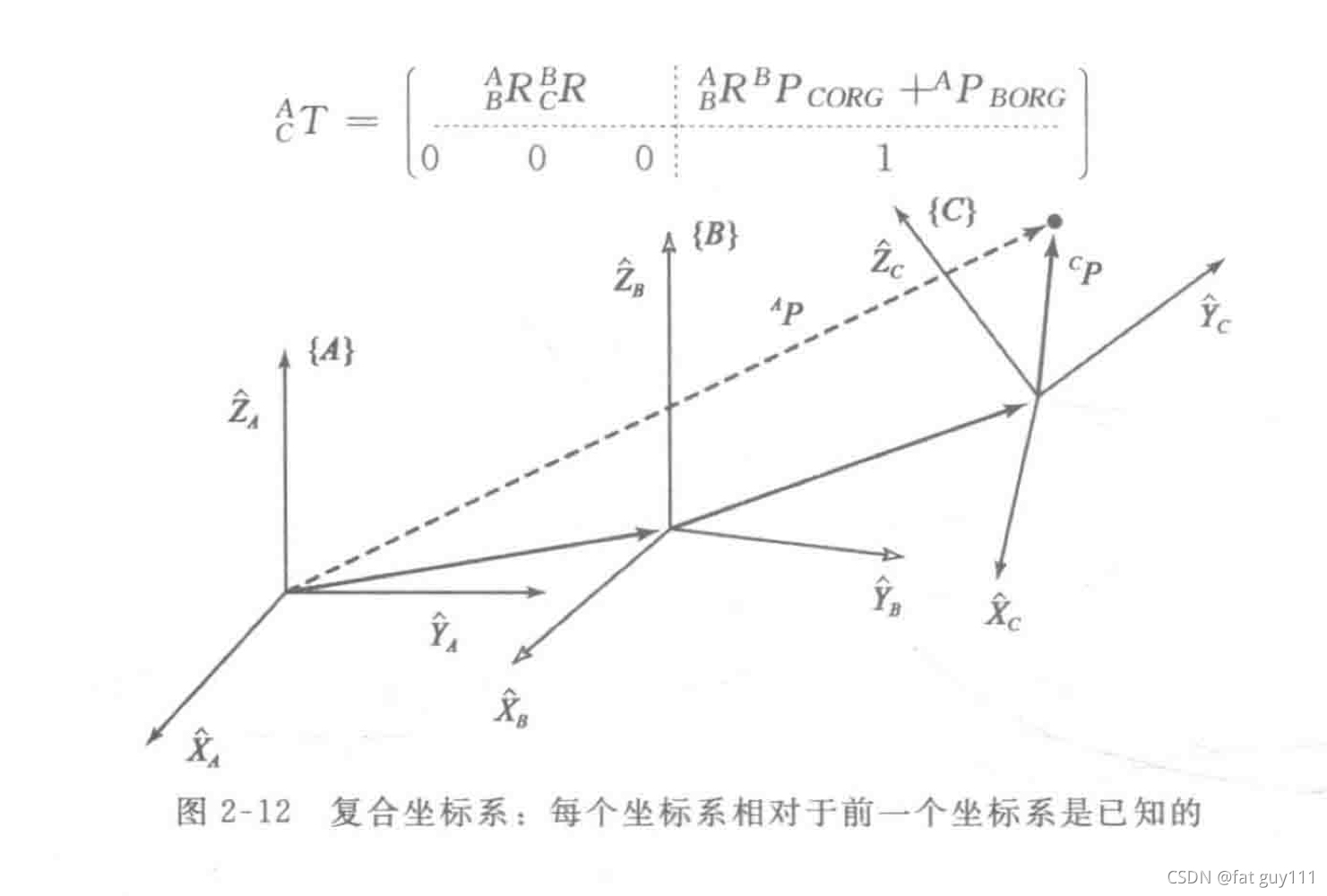
1.复合变换
已知坐标系{C}相对于坐标系{B},{B}相对于{A}
由此定义
即:
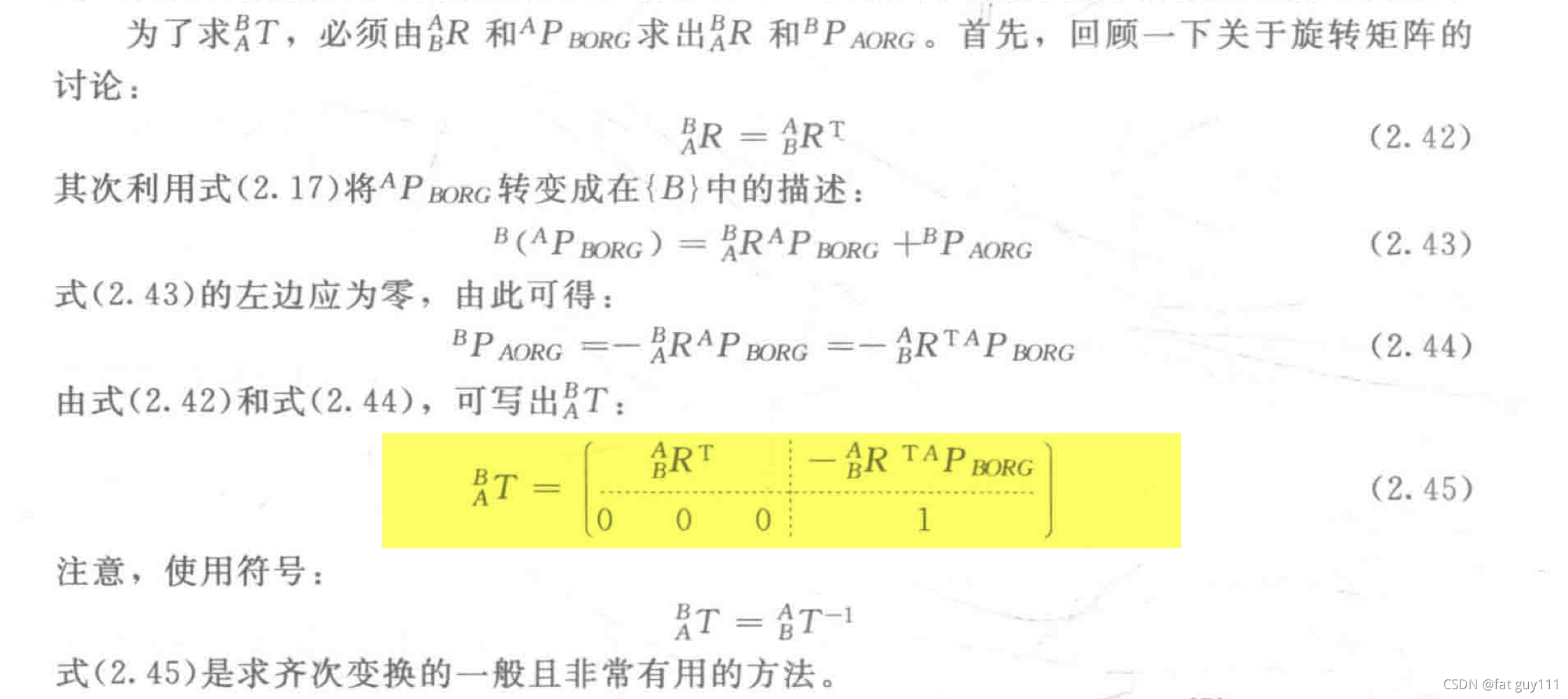
2.逆变换
已知
,求
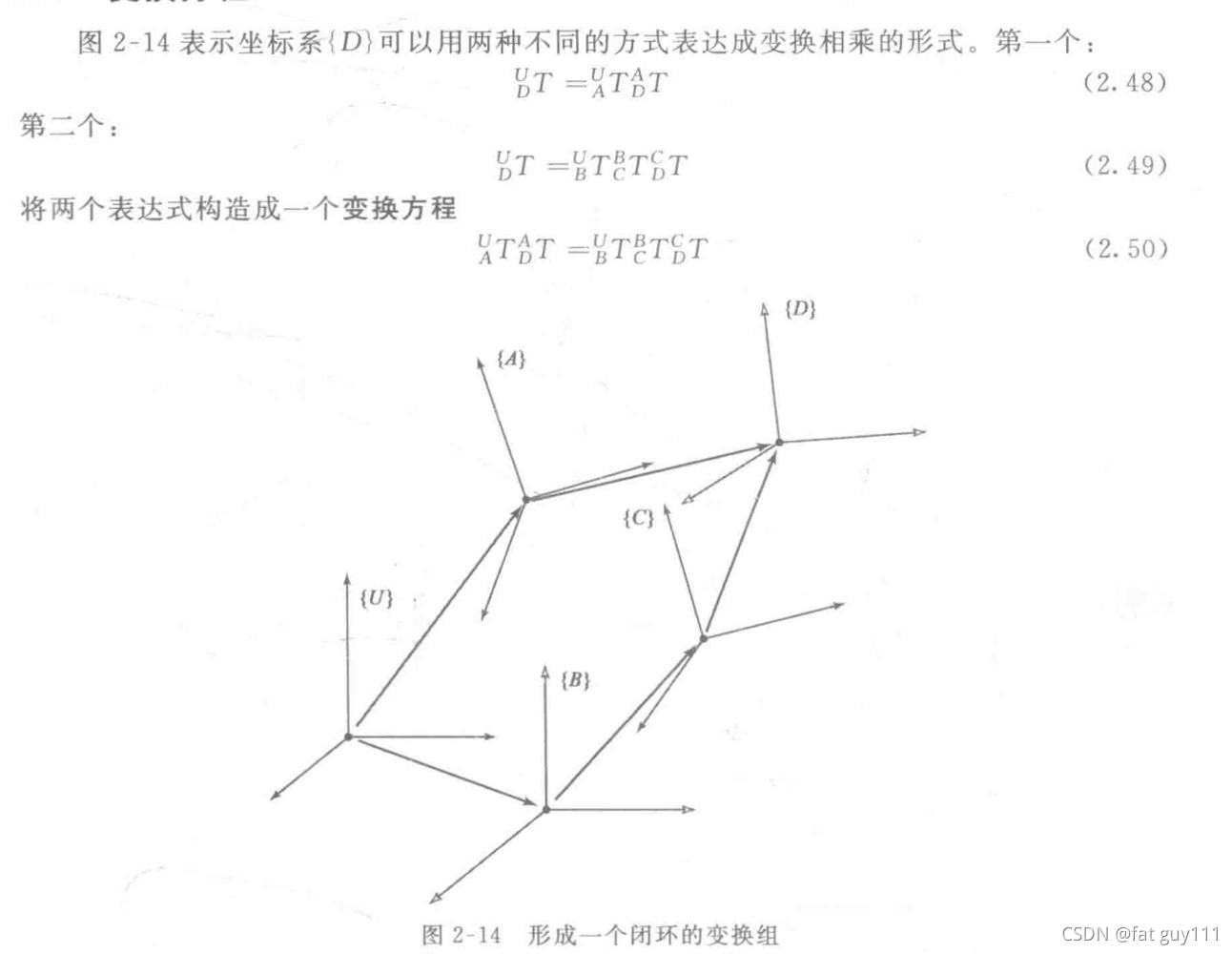
2.7变换方程
坐标系的图形表示法:用箭头的方向指明坐标系定义的方式
2.8其他姿态描述
至此,只给出了用3*3旋转矩阵来表示姿态。如上所述,旋转矩阵是一种特殊的各列相互正交的单位阵。其行列式恒为+1,旋转矩阵也可被称作
标准正交阵。
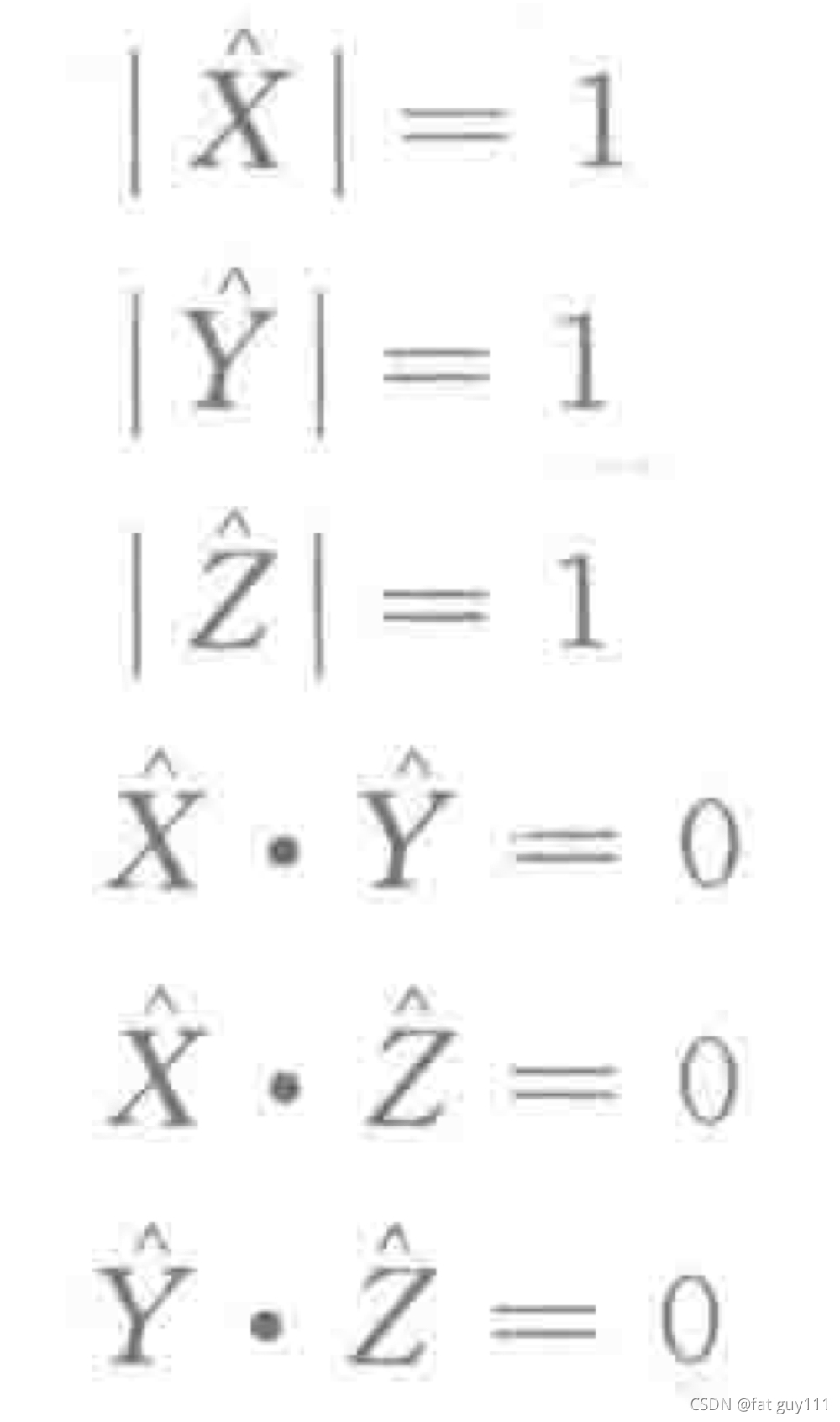
显然,旋转矩阵的9个分量并不是完全独立的,这9个元素一定有如下6个约束。
首先,假定R为3列即
,那么:
X—Y—Z固定角
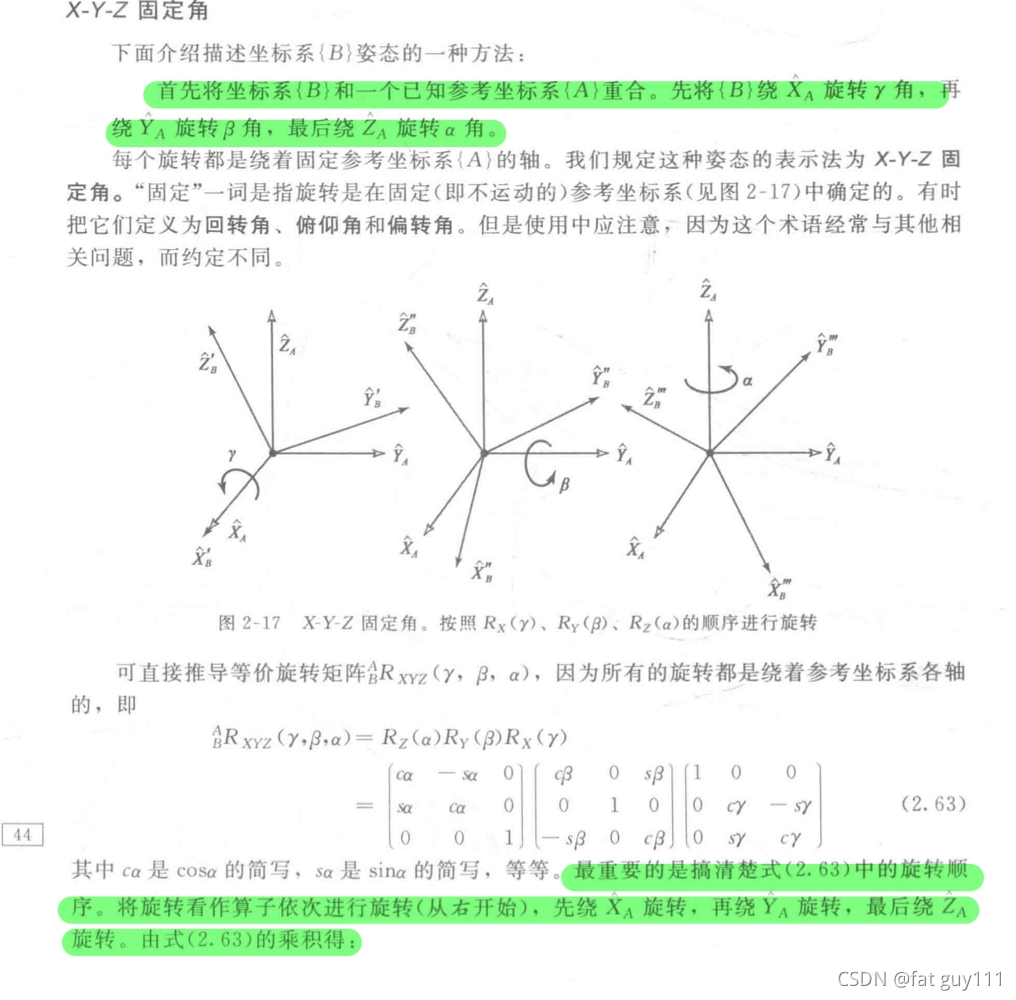
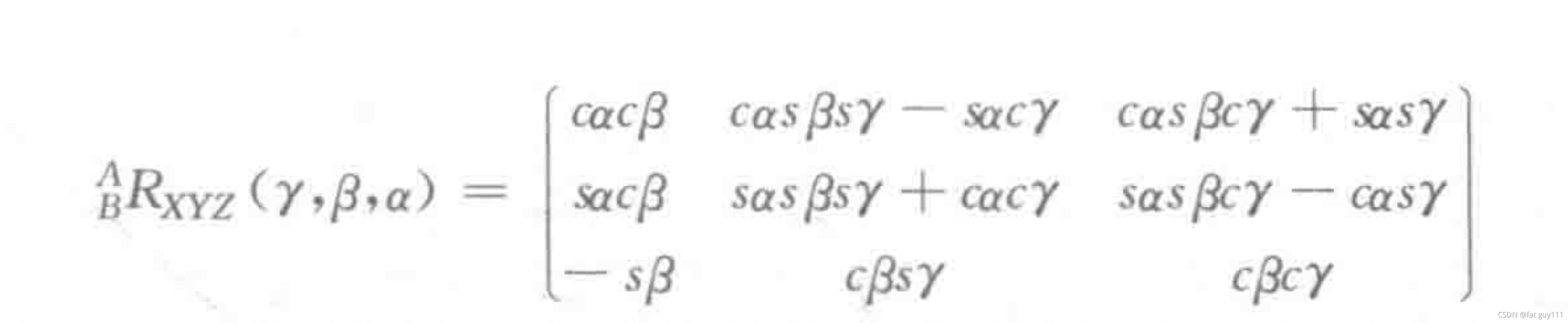
其他的描述方法(如Z——Y——X欧拉角等)大同小异都是用3个角度变量来描述旋转坐标系)
2.9 自由矢量的变换
矢量相等
:具有相同的维数,大小和方向
矢量等效
:在某一功能上产生了相同的作用效果
线矢量
:与作用线有关的矢量
自由矢量
:可能出现在空间任意位置的矢量
2.10计算问题