使用 Action :move_base_msgs::MoveBaseAction(move_base在world中的目标)
新建send_goal.cpp
/*
* send_goal.cpp
*
* Created on: Aug 10, 2016
* Author: unicorn
*/
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
/*move_base_msgs::MoveBaseAction
move_base在world中的目标
*/
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv) {
ros::init(argc, argv, "send_goals_node");
/*
// create the action client
// true causes the client to spin its own thread
//don't need ros::spin()
创建action客户端,参数1:action名,参数2:true,不需要手动调用ros::spin(),会在它的线程中自动调用。
*/
MoveBaseClient ac("move_base", true);
// Wait 60 seconds for the action server to become available
ROS_INFO("Waiting for the move_base action server");
ac.waitForServer(ros::Duration(60));
ROS_INFO("Connected to move base server");
// Send a goal to move_base
//目标的属性设置
move_base_msgs::MoveBaseGoal goal;
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = 21.174;
goal.target_pose.pose.position.y = 10.876;
goal.target_pose.pose.orientation.w = 1;
ROS_INFO("");
ROS_INFO("Sending goal");
ac.sendGoal(goal);
// Wait for the action to return
ac.waitForResult();
if (ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("You have reached the goal!");
else
ROS_INFO("The base failed for some reason");
return 0;
}CMakeList.txt
add_executable(send_goal src/send_goal.cpp)
target_link_libraries(send_goal
${catkin_LIBRARIES}
)新建launch文件goal_launch.launch
<launch>
<master auto="start"/>
<param name="/use_sim_time" value="true"/>
<include file="$(find navigation_stage)/move_base_config/move_base.xml"/>
<node pkg="stage_ros" type="stageros" name="stageros" args="$(find navigation_stage)/stage_config/worlds/willow-pr2-2.5cm.world" respawn="false" >
<param name="base_watchdog_timeout" value="0.2"/>
</node>
<include file="$(find navigation_stage)/move_base_config/amcl_node.xml"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find navigation_stage)/single_robot.rviz" />
<node name="send_goal" pkg="navigation_example" type="send_goal" output="screen"/>
</launch>launch 中的节点
<node name="map_server" pkg="map_server" type="map_server" args="$(find navigation_stage)/stage_config/maps/" respawn="false" />
使用willow-full-0.025.pgm 0.025,注意要换成自己的文件目录,我的是在navigation_stage/stage_config/maps/文件中。
其他节点类似。
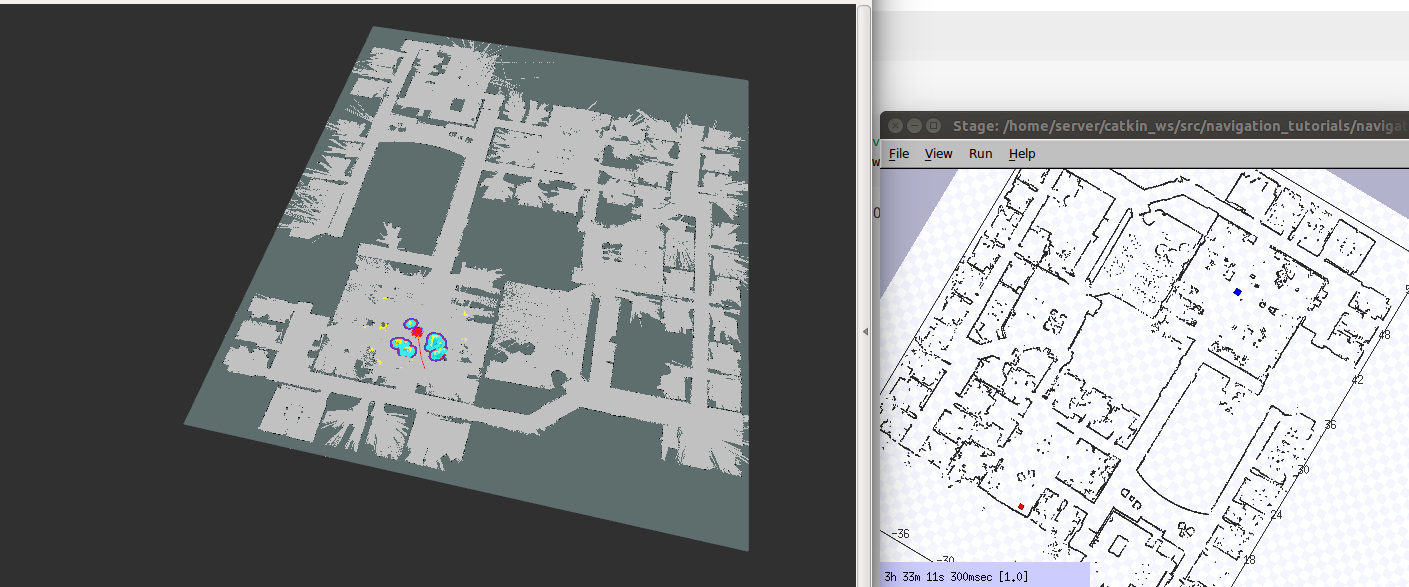
运行launch。
结果:
版权声明:本文为yiranhaiziqi原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。