目录
系统
虚拟机 VMware16 pro
ubuntu 20.04
ros 版本 noetic
参考文档
http://www.autolabor.com.cn/book/ROSTutorials/chapter1.html
安装ros
1.设置安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.更新
sudo apt updatesudo apt install ros-noetic-desktop-full4.初始化
sudo rosdep init5.配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc6.安装依赖
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
7.测试
roscore
再开一个终端运行:
rosrun turtlesim turtlesim_node
创建工作环境
1.用终端创建
1.mkdir -p demo01/src
2.cd demo01_ws
3.catkin_make
4.cd src
5.catkin_create_pkg demo01 roscpp rospy std_msgs
2.用vscode创建
可以用win电脑下载deb文件
https://code.visualstudio.com/Download
再复制到虚拟机,也可以用ubuntu自带浏览器下载,注意下载deb文件。
vscode 插件
c++ CMake Tools python ROS
1.mkdir -p demo01/src
2.cd demo01_ws
3.catkin_make
4.打开vscode,选定 src 右击 ---> create catkin package
输入包名:demo01 回车
输入依赖: roscpp rospy std_msgs 回车
5.修改.vscode/tasks.json 文件(这步仅参考)
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
开源社区
1.
ros维基
2.
ros 问答
计算图
运行launch文件,
运行launch
1.source ./devel/setup.bash
2.roslaunch ros_ship_description text.launch安装
sudo apt install ros-noetic-rqt
sudo apt install ros-noetic-rqt-common-plugins
启动
rosrun rqt_graph rqt_graph
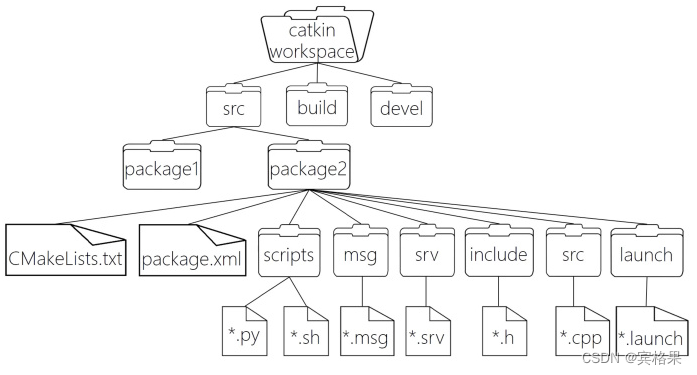
文件系统
版权声明:本文为D123445原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。