常见的无人机仿真平台大都是用于对底层飞控算法的仿真与调试,XTDrone仿真平台与Prometheus仿真平台可以针对无人机上层算法进行仿真或者进行编队仿真,这两者都采用ROS+PX4+Gazebo开源平台,两者非常相似,其中XTDrone平台更侧重于仿真,Prometheus平台更侧重于真实无人机的实现。
XTDrone开源程序
XTDrone开发文档
Prometheus开源程序
Prometheus开发文档
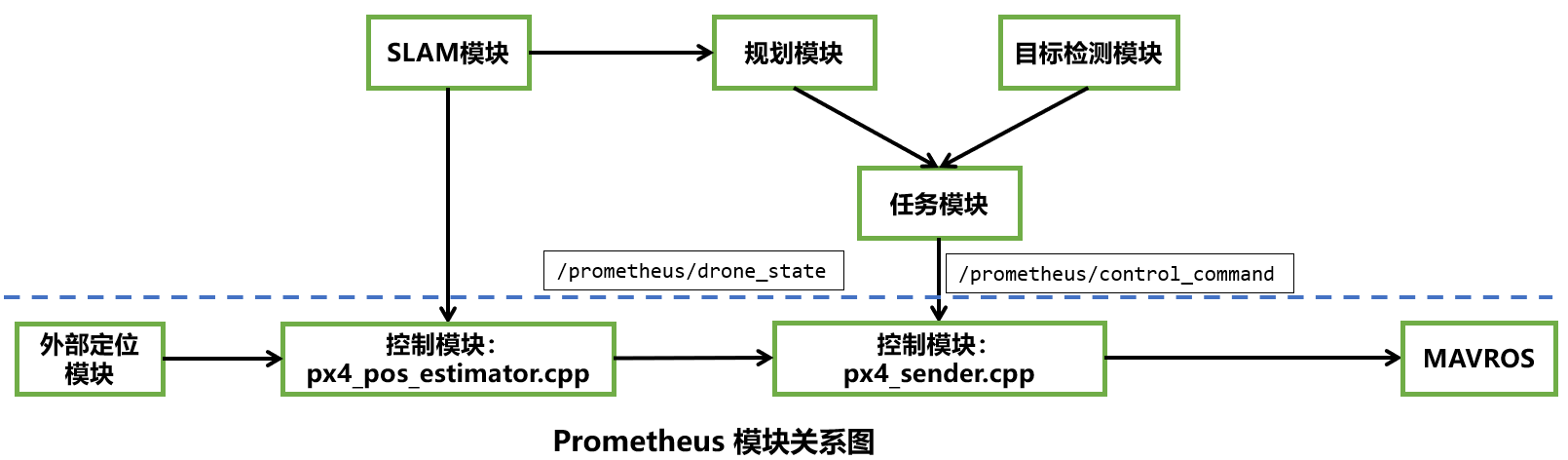
Prometheus项目框架
代码框架
| 代码目录 | 功能 |
|---|---|
| Modules | 各模块功能的源代码 |
| Simulator | 仿真飞行相关代码 |
| Experiment | 真实飞行相关代码 |
Modules介绍
| 模块 | 目录 | 功能 |
|---|---|---|
| 控制模块 | Modules/control | 底层控制 |
| 规划模块 | Modules/planning | 路径规划 |
| SLAM模块 | Modules/slam | 定位与建图 |
| 目标检测模块 | Modules/object_detection | 目标识别与检测 |
| 地面站模块 | Modules/ground_station | 地面监控与消息打印 |
| 任务模块 | Modules/mission | 上层任务 |
| 公用模块 | Modules/common | 各模块公用代码 |
| 自定义消息模块 | Modules/common/msgs | 本项目自定义消息 |
模块关系图
XTDrone项目框架
代码框架
| 代码目录 | 功能 |
|---|---|
| communication | 通讯相关代码 |
| control | 控制相关代码 |
| coordination | 编队相关代码 |
| motion_planning | 规划相关代码 |
| sensing | 传感器相关代码 |
| sitl_config | 配置和其他相关代码 |
单机仿真架构如下图所示
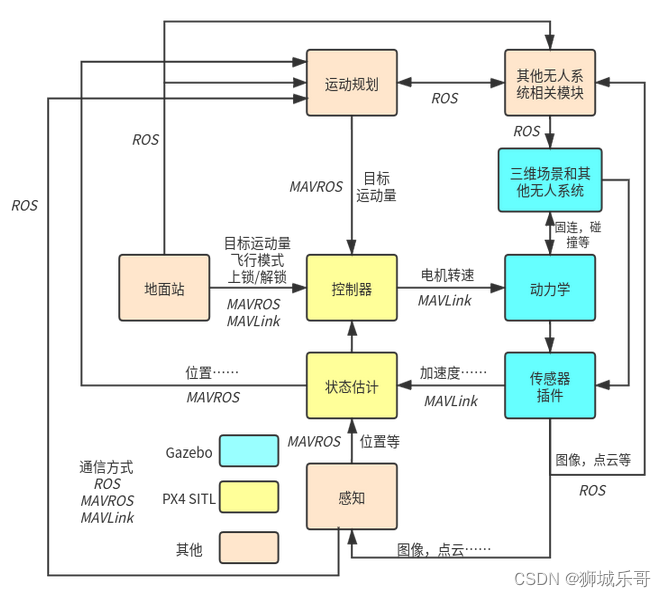
多机仿真架构如下图所示

这两个仿真平台有诸多相似之处,在学习时可以综合借鉴两者程序进行学习。
版权声明:本文为lele1234565原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。