碰壁:
1.VMware15.5因为兼容性问题,启动虚拟机,电脑就蓝屏重启。解决:安16pro版本。
2.rosdep问题,网络问题,不停的超时。解决:通过鱼香ROS博主的方法。
安装原因:ubuntu20.04支持python3,同时安装ros对应的版本是noetic不需要rosdep(但是官方后期又补齐了这个操作),而且是ros1最后一版方便过渡到ros2.、
安装准备:
1.注册好的VMware16pro(用15.5会因为兼容性蓝屏,解决需要修改系统底层服务,用VMware不用安装工具就能缩放全屏,免费的那款得安装一些工具)
2.准备镜像
ubuntu-releases-20.04安装包下载_开源镜像站-阿里云 (aliyun.com)
下载几个G那个iso镜像,放在能找到的位置,准备好。
3.重头到尾,安装时间3小时,主要是国内阿里源不是很快。
安装步骤:
1.创建新的虚拟机
2.典型
3.稍后安装操作系统
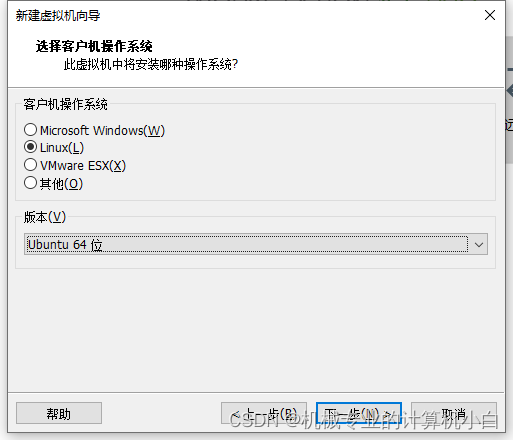
4.linux,ubuntu64位
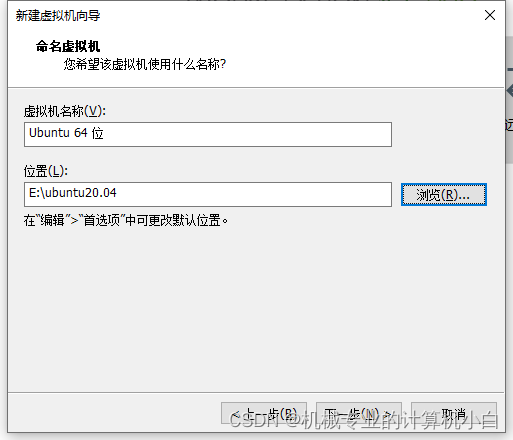
5.找到合适位置
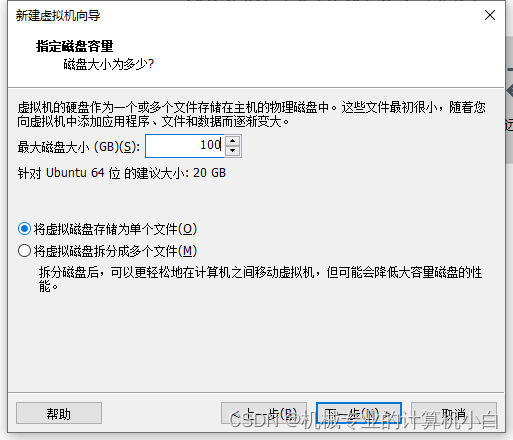
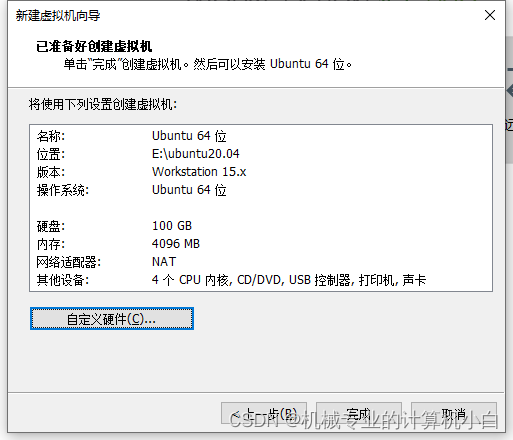
6.根据需求分配。我要安ros,同时要练习会加入很多功能包,故分配100G
7.自定义硬件,因为默认的不满足我的要求

内存:建议4g,2g内存不够时会卡死。
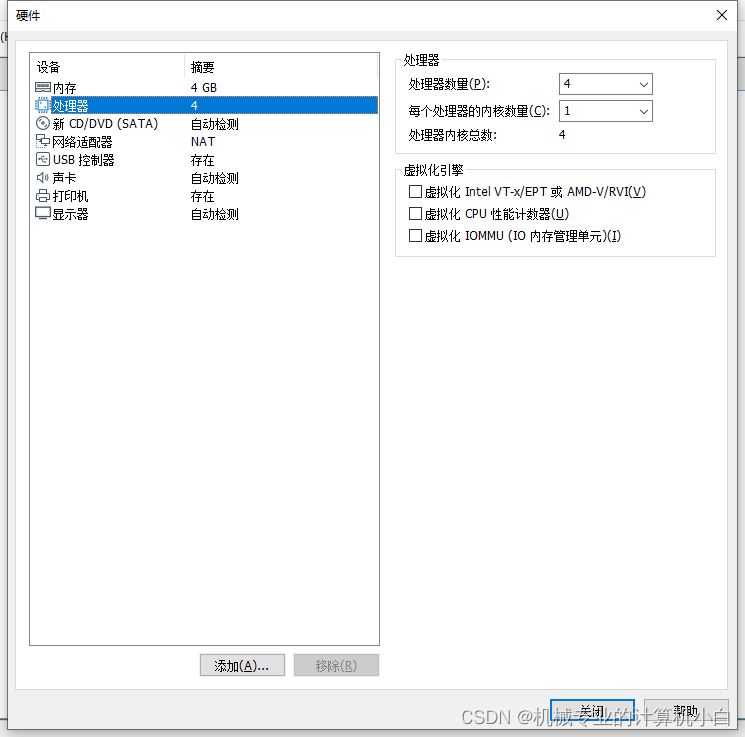
处理器:去设备管理器查看,我是11代i9,8核16线程,给分配4核。
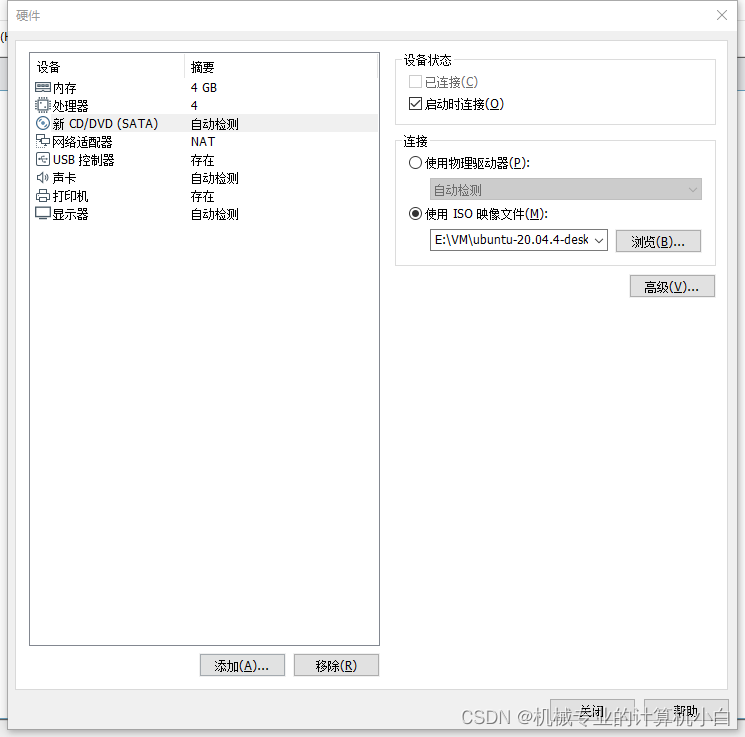
把准备好的安装盘iso文件加上。
8.完成
9.启动虚拟机,如果是VMware15.5pro版本启动虚拟机会出现蓝屏问题。
10.安装ubuntu

11.出现分辨率问题用alt+F7拖动,继续
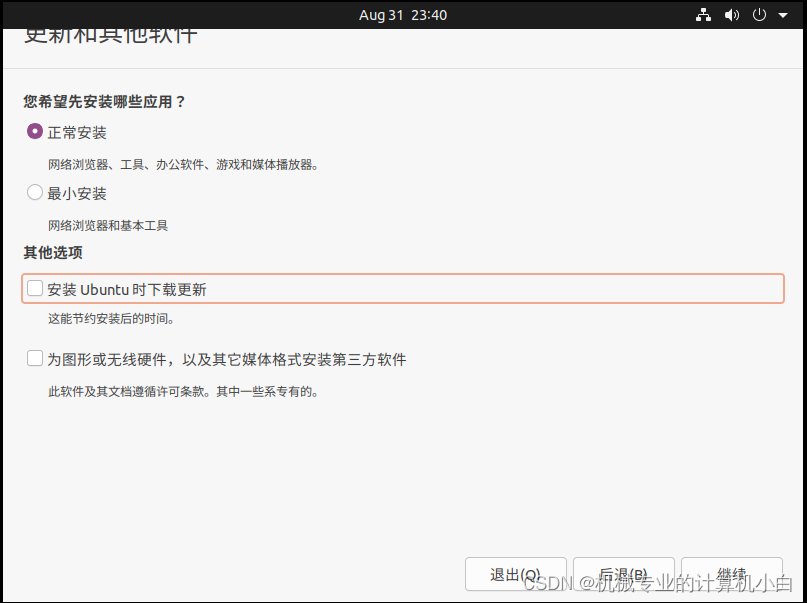
12.解除安装ubuntu时下载更新,等换完源再更新,要不慢。
13.现在安装,弹窗选继续

14.点中国,让时间准确

15.填写+自动登录

16.现在重启
17.设置从哪里下载,选择阿里云

18.打开终端,加入清华源+设置key+更新apt+安装ros-noetic
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

sudo apt update
sudo apt install ros-noetic-desktop-full
有时候清华源没有就得去阿里源下载,很慢,耐心等待。没按成功重复输出命令即可。
19.配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc
20.安装依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
接下来用鱼香ros的方法,不会出现超时的问题。
sudo apt-get install python3-pip
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
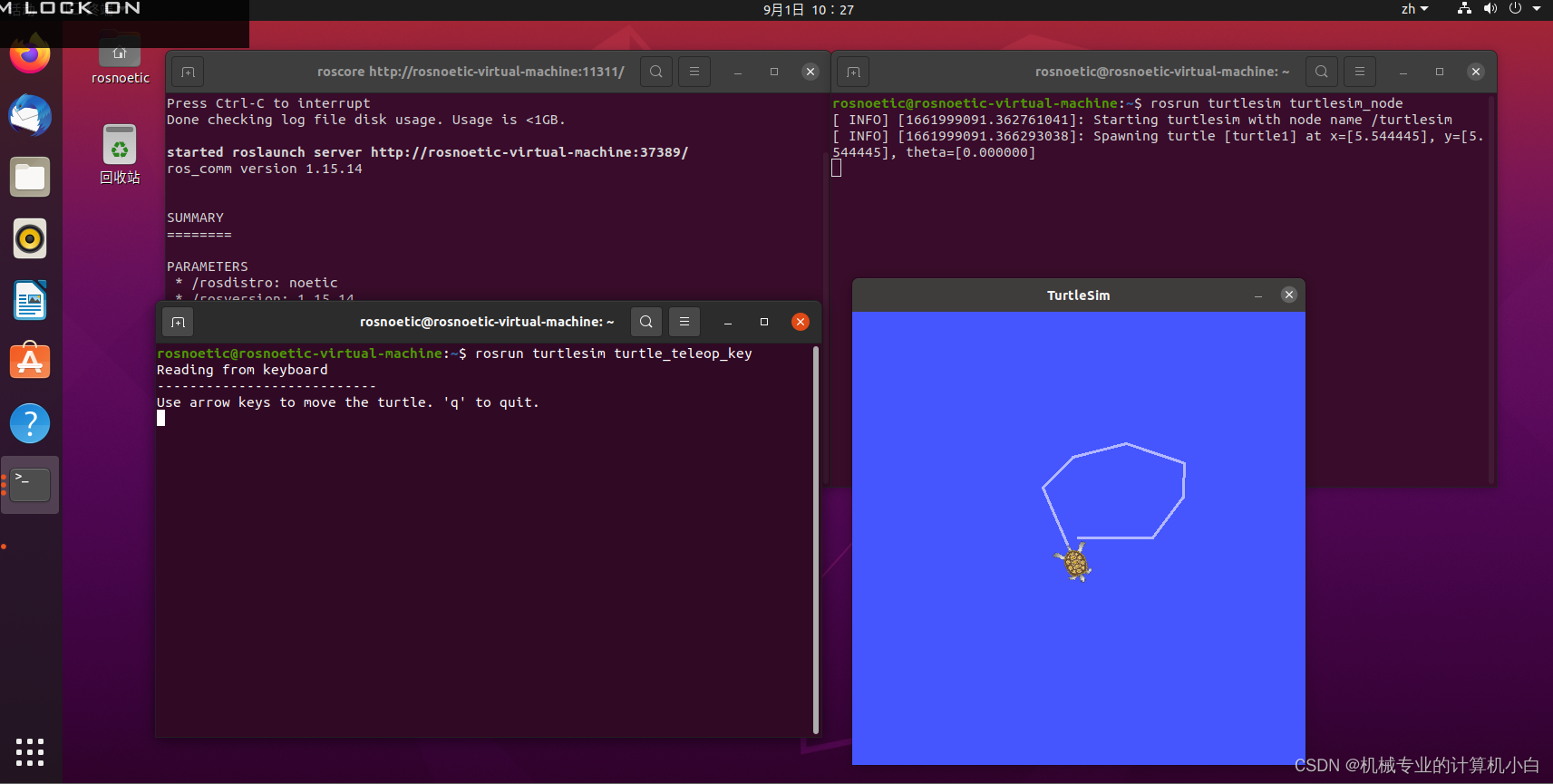
21.到此安装结束,进入测试。
分别开启3个终端依次输入命令行
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key点击最后一个终端,可以通过方向键控制海龟,没报错且运行正常,安装成功。