定义
给定一张图,图中有许多的节点还有许多长度不同的边将这些点点相互连接(
连通网
),找出连接所有点的最短方式就是最小生成树,可以证明,这样一种最小的情况是不会出现环的,由于所有的无环图都可以看作树,所以成为最小生成树。

解决问题类型
因为是求最小的,一般是修路问题(代价最小且连接所有点)。
基本算法
1、Prime算法—“加点法”
主要步骤:
1.将图保存邻接矩阵之中(便于访问是否邻接);
2.任选一点作为起始点;
3.将此点加入到已确定点集之中;
4.依此点为原点,更新与之相关联的节点到点集的距离(最小);
5. 选中剩余点中距离点集最近的点,加入点集,并以其为原点更新和他相邻接的点的距离;
6. 循环,直到点集中有n个点为止。
图形表示:
以下来源为这位大大(通俗易懂)
原图为:

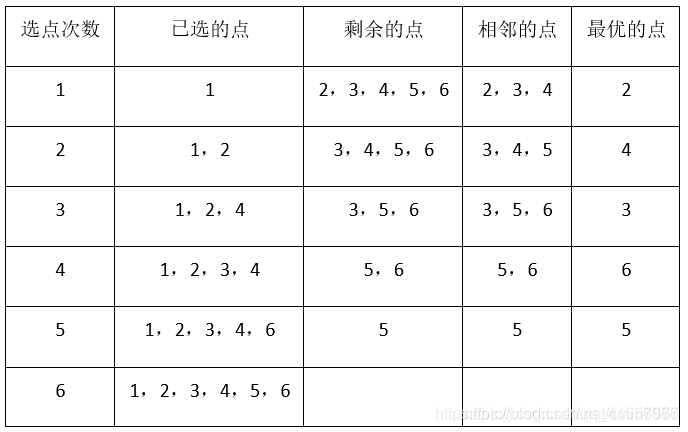
1.首先先找一个点,把这个点看成一个集合

2.找与这个点最近的一个点,也就是找与这个集合最近的一个点,由图可知与1点相邻的有2,3,4三个点,但最近的是2点,并且2点没在已选的集合中,所以把2点加到已选的集合中。

3.现在1和2是在已选的集合中,然后再找与已选集合最近的点,其中相邻的有3,4,5三个点,但最近的只有点4,所以把4点加到已选集合中。

4.然后再找与已选集合最近的点,以此类推下个点为3

6.再下个点为6

7.最后一个点为5,选完所有点后结束
(经过六个图形描述,最后一个自己动手画吧~~~)
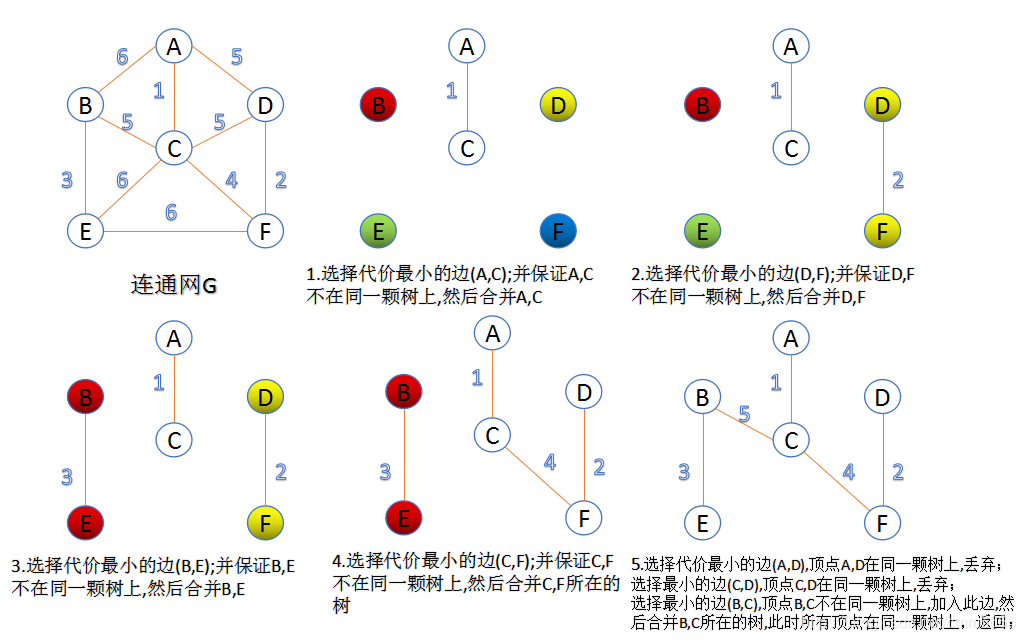
2、Kruskal算法—“加边法”
算法思路:
(1)将图中的所有边都去掉。
(2)将边按权值从小到大的顺序添加到图中,保证添加的过程中不会形成环
(3)重复上一步直到连接所有顶点,此时就生成了最小生成树。这是一种贪心策略。
主要步骤:
1.将图保存在临接矩阵之中(便于访问是否邻接);
2先把所有的路径进行排序;
3.先选一天路径最小的边然后判断这两个点是否在同一个集合中,如果没有就把这两个点加到一个集合中;
4.然后依次找路径最小的边,并判断这条边上的两个点是否在同一个集合中,如果没在同一个集合中且这两个点没有都被标记过,就把这两个点合到同一个集合中;
5.循环来找,直到点找完为止。
图形表示:
代码(2个):
/************************************************************************
CSDN 勿在浮沙筑高台 http://blog.csdn.net/luoshixian099算法导论--最小生成树(Prim、Kruskal)2016年7月14日
************************************************************************/
#include <iostream>
#include <vector>
#include <queue>
#include <algorithm>
using namespace std;
#define INFINITE 0xFFFFFFFF
#define VertexData unsigned int //顶点数据
#define UINT unsigned int
#define vexCounts 6 //顶点数量
char vextex[] = { 'A', 'B', 'C', 'D', 'E', 'F' };
struct node
{
VertexData data;
unsigned int lowestcost;
}closedge[vexCounts]; //Prim算法中的辅助信息
typedef struct
{
VertexData u;
VertexData v;
unsigned int cost; //边的代价
}Arc; //原始图的边信息
void AdjMatrix(unsigned int adjMat[][vexCounts]) //邻接矩阵表示法
{
for (int i = 0; i < vexCounts; i++) //初始化邻接矩阵
for (int j = 0; j < vexCounts; j++)
{
adjMat[i][j] = INFINITE;
}
adjMat[0][1] = 6; adjMat[0][2] = 1; adjMat[0][3] = 5;
adjMat[1][0] = 6; adjMat[1][2] = 5; adjMat[1][4] = 3;
adjMat[2][0] = 1; adjMat[2][1] = 5; adjMat[2][3] = 5; adjMat[2][4] = 6; adjMat[2][5] = 4;
adjMat[3][0] = 5; adjMat[3][2] = 5; adjMat[3][5] = 2;
adjMat[4][1] = 3; adjMat[4][2] = 6; adjMat[4][5] = 6;
adjMat[5][2] = 4; adjMat[5][3] = 2; adjMat[5][4] = 6;
}
int Minmum(struct node * closedge) //返回最小代价边
{
unsigned int min = INFINITE;
int index = -1;
for (int i = 0; i < vexCounts;i++)
{
if (closedge[i].lowestcost < min && closedge[i].lowestcost !=0)
{
min = closedge[i].lowestcost;
index = i;
}
}
return index;
}
void MiniSpanTree_Prim(unsigned int adjMat[][vexCounts], VertexData s)
{
for (int i = 0; i < vexCounts;i++)
{
closedge[i].lowestcost = INFINITE;
}
closedge[s].data = s; //从顶点s开始
closedge[s].lowestcost = 0;
for (int i = 0; i < vexCounts;i++) //初始化辅助数组
{
if (i != s)
{
closedge[i].data = s;
closedge[i].lowestcost = adjMat[s][i];
}
}
for (int e = 1; e <= vexCounts -1; e++) //n-1条边时退出
{
int k = Minmum(closedge); //选择最小代价边
cout << vextex[closedge[k].data] << "--" << vextex[k] << endl;//加入到最小生成树
closedge[k].lowestcost = 0; //代价置为0
for (int i = 0; i < vexCounts;i++) //更新v中顶点最小代价边信息
{
if ( adjMat[k][i] < closedge[i].lowestcost)
{
closedge[i].data = k;
closedge[i].lowestcost = adjMat[k][i];
}
}
}
}
void ReadArc(unsigned int adjMat[][vexCounts],vector<Arc> &vertexArc) //保存图的边代价信息
{
Arc * temp = NULL;
for (unsigned int i = 0; i < vexCounts;i++)
{
for (unsigned int j = 0; j < i; j++)
{
if (adjMat[i][j]!=INFINITE)
{
temp = new Arc;
temp->u = i;
temp->v = j;
temp->cost = adjMat[i][j];
vertexArc.push_back(*temp);
}
}
}
}
bool compare(Arc A, Arc B)
{
return A.cost < B.cost ? true : false;
}
bool FindTree(VertexData u, VertexData v,vector<vector<VertexData> > &Tree)
{
unsigned int index_u = INFINITE;
unsigned int index_v = INFINITE;
for (unsigned int i = 0; i < Tree.size();i++) //检查u,v分别属于哪颗树
{
if (find(Tree[i].begin(), Tree[i].end(), u) != Tree[i].end())
index_u = i;
if (find(Tree[i].begin(), Tree[i].end(), v) != Tree[i].end())
index_v = i;
}
if (index_u != index_v) //u,v不在一颗树上,合并两颗树
{
for (unsigned int i = 0; i < Tree[index_v].size();i++)
{
Tree[index_u].push_back(Tree[index_v][i]);
}
Tree[index_v].clear();
return true;
}
return false;
}
void MiniSpanTree_Kruskal(unsigned int adjMat[][vexCounts])
{
vector<Arc> vertexArc;
ReadArc(adjMat, vertexArc);//读取边信息
sort(vertexArc.begin(), vertexArc.end(), compare);//边按从小到大排序
vector<vector<VertexData> > Tree(vexCounts); //6棵独立树
for (unsigned int i = 0; i < vexCounts; i++)
{
Tree[i].push_back(i); //初始化6棵独立树的信息
}
for (unsigned int i = 0; i < vertexArc.size(); i++)//依次从小到大取最小代价边
{
VertexData u = vertexArc[i].u;
VertexData v = vertexArc[i].v;
if (FindTree(u, v, Tree))//检查此边的两个顶点是否在一颗树内
{
cout << vextex[u] << "---" << vextex[v] << endl;//把此边加入到最小生成树中
}
}
}
int main()
{
unsigned int adjMat[vexCounts][vexCounts] = { 0 };
AdjMatrix(adjMat); //邻接矩阵
cout << "Prim :" << endl;
MiniSpanTree_Prim(adjMat,0); //Prim算法,从顶点0开始.
cout << "-------------" << endl << "Kruskal:" << endl;
MiniSpanTree_Kruskal(adjMat);//Kruskal算法
return 0;
}