系统配置:
Ubuntu16.04+ros-kinect
gtsam+eigen:gtsam(
4.0.0
)+eigen(
3.3.7
)
编译gtsam过程一帆风顺,没有任何问题,在编译
Lego-LOAM
时出现一个错误,解决方法参见这篇
博文
,但是当我运行“
roslaunch lego_loam run.launch
” 出现了如下图所示的错误:
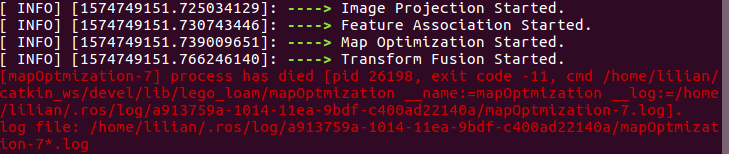
应该是gtsam的问题,我将eigen 的版本改为
3.3.4
,发现还是报一样的错,接着将eigen的版本改为
3.2.8
,编译gtsam的出现一堆warning(看起来非常难受,你懂的)但是不影响编译通过,这次就可以运行了“ roslaunch lego_loam run.launch”。
gtsam安装包中有一个
3rdparty
,Eigen库就放在这里,替换时,将其替换为对应的版本的eigen就行。
**
参考文档
CSDN:https://blog.csdn.net/qq_43145072/article/details/92770932
版权声明:本文为qq_27977711原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。