依照瑞萨公司的
《CAN入门书》
的组织思路来学习CAN通信的相关知识,并结合网上相关资料以及学习过程中的领悟整理成笔记。好记性不如烂笔头,加油!
1 位定时
1.1 比特率和波特率
1) .
位速率
:又叫做
比特率(bit rata)
、
信息传输率
,表示的是单位时间内,总线上传输的
信息量
,即
每秒能够传输的二进制位的数量
,单位是bit per second。
2)
波特率
:又叫做
传码率
、
信号传输率
,表示的是单位时间内传输的码元的数量,当两相调制时,一个码元用一个二进制位表示,此时波特率在数值上和比特率是一样的,CAN总线正是两项调制这种情况。
Tips:
比特率
和
波特率
并不是一回事儿,这一定一定要牢记。
1.2 位时间
1.2.1 位时间的概念
位时间
:表示的是一个二进制位在总线上传输时所需要的时间。
所以:
位
速
率
=
1
位
时
间
位 速 率 = 1 位 时 间
首先了解以下CAN总线系统中的两个时钟:
晶振时钟周期
和
CAN时钟周期
-
晶振时钟周期
:是由单片机振荡器的晶振频率决定的,指的是
振荡器每震荡一次所消耗的时间长度
,也是整个系统中最小的时间单位。 -
CAN时钟周期
:CAN时钟是由系统时钟分频而来的一个时间长度值,实际上就是
一个时间份额Tq
。可以按照下面的公式计算:
C
A
N
时
钟
周
期
=
2
×
晶
振
时
钟
周
期
×
B
R
P
C A N 时 钟 周 期 = 2 × 晶 振 时 钟 周 期 × B R P
其中BRP叫做波特率预分频值(baudrate prescaler)。
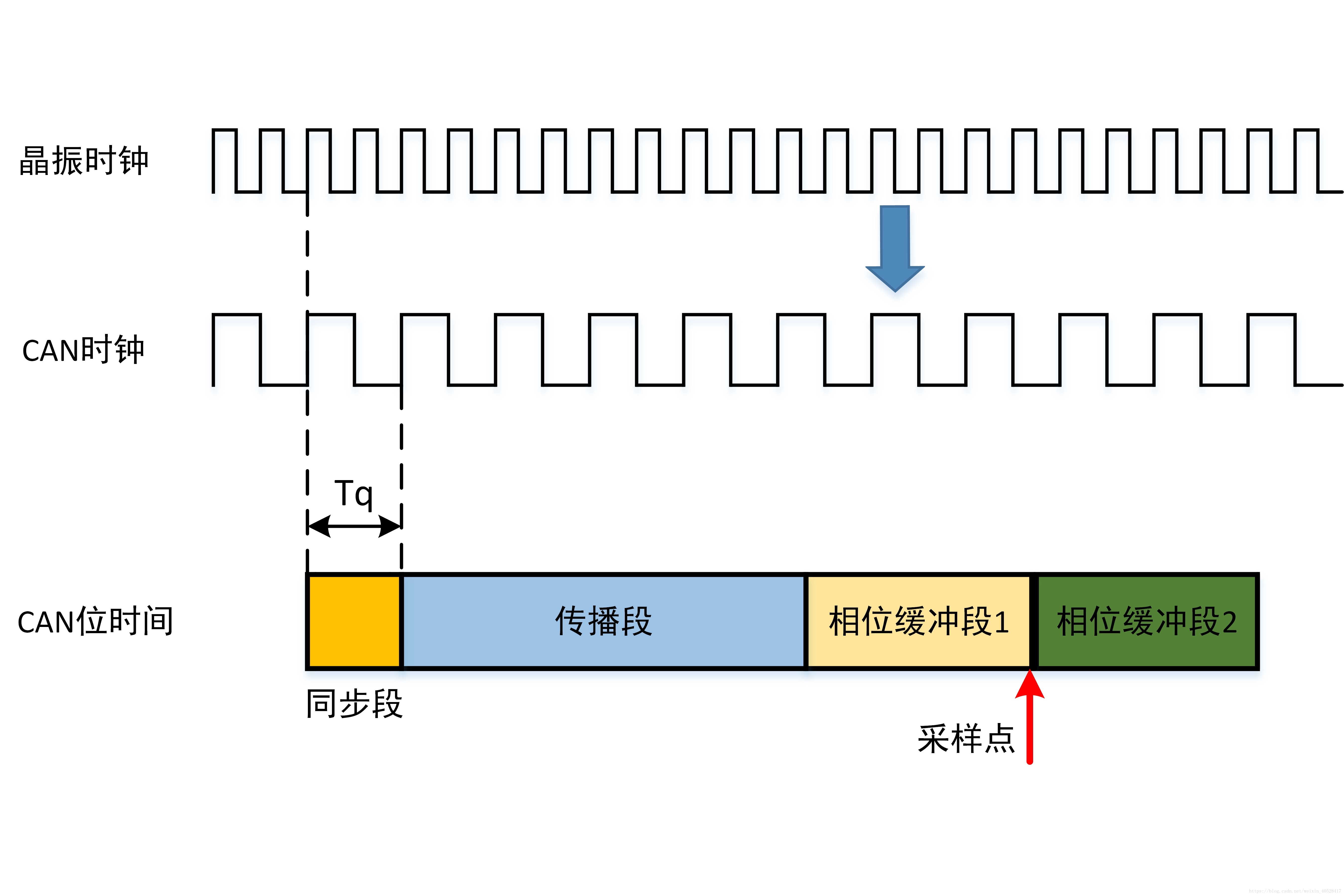
1.2.2 位时间的分段
如上文所述,在CAN的位定时中,一个CAN时钟周期称为一个
时间量子
—
Tq
。
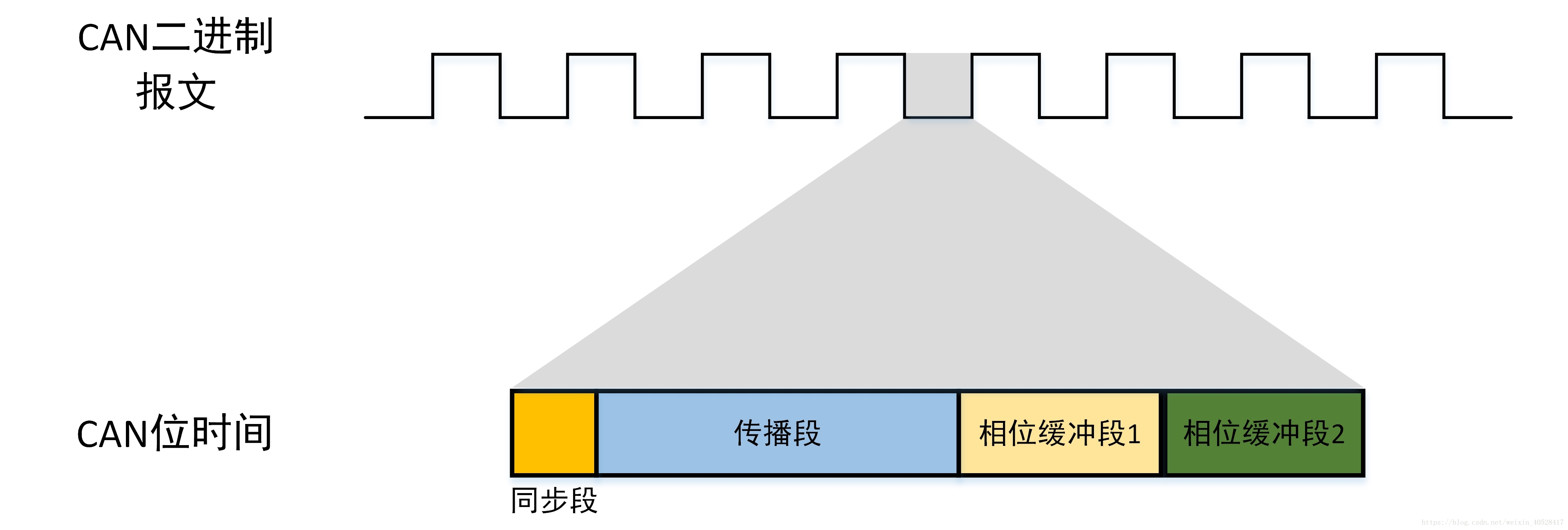
如下图所示:位时间分为四个段:
同步段、传播段、相位缓冲段1、相位缓冲段2
,总共8~25个时间量子(Tq)。
1)
同步段
(Synchronization Segment):
- 长度固定,1个时间量子Tq;
- 一个位的传输从同步段开始;
- 同步段用于同步总线上的各个节点,一个位的跳边沿在此时间段内。
2)
传播段
(Propagation Segment):
- 传播段用于补偿报文在总线和节点上传输时所产生的时间延迟;
- 传播段时长 ≥ 2 × 报文在总线和节点上传输时产生的时间延迟 ;
- 传播段时长可编程(1~8个时间量子Tq)。
3)
相位缓冲段1
(Phase Buffer Segment1):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段加长;
- 在这个时间段的末端进行总线状态的采样;
- 长度可编程(1~8个时间量子Tq)
4)
相位缓冲段2
(Phase Buffer Segment2):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段缩短;
- 长度可编程(1~8个时间量子Tq)
于是
t
B
i
t
=
t
S
S
+
t
P
S
+
t
P
B
S
1
+
t
P
B
S
2
t B i t = t S S + t P S + t P B S 1 + t P B S 2
tBit:位时间
tSS:同步段时间
tPS:传播段时间
tPBS1:时间段1
tPBS2:时间段2
2 CAN的同步机制
在CAN通信中,有两种同步机制:
硬同步
与
重同步
。
2.1 同步的规则
☆
一个位时间
内只允许
一种同步方式
,要么硬同步要么重同步;
☆ 任何一个从“隐性”到“显性”的
下降沿
都可以用于同步;
☆
硬同步
发生在报文的
SOF位
,所有接收节点调整各自当前位的同步段,使其位于发送的SOF位内;
☆
重同步
发生在一个报文
SOF位之外的其它段
,当下降沿落在了同步段之外时发生重同步;
☆ 在SOF到仲裁场发送的时间段内,如果有多个节点同时发送报文,那么这些发送节点对跳变沿不进行重同步
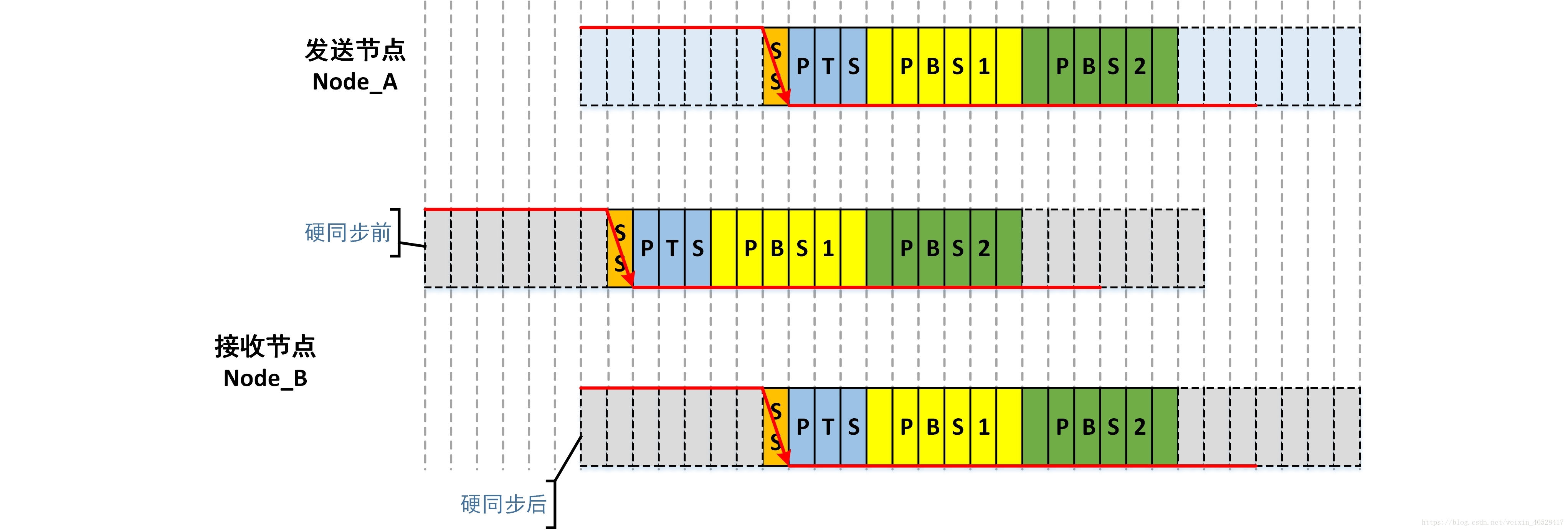
2.2 硬同步
硬同步发生在
SOF位
,所有
接收节点
调整各自
当前位的同步段
,
调整宽度不限
(1)发送节点Node_A在发送SOF位时,SOF位的下降沿在SS段;
(2)这个时候接收节点Node_B发现自己当前位的SS段和发送节点SOF位的SS段不同步。也就是说当Node_A产生SOF位SS段时,Node_B的当前位的SS段已经在5