Webots+ROS学习记录(3)——四轮移动机器人
一、四轮移动机器人模型
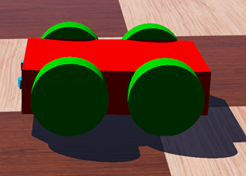
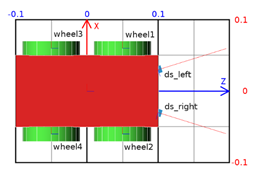
本教程的目的是从头创建你的第一个机器人。这个机器人将由一个身体、四个轮子和两个距离传感器组成。结果如图1所示。图2从俯视图显示了机器人的坐标关系。
二、步骤
a) 新建一个仿真
-
新建一个工程,确保你的新world里面有地面、墙壁和照明(ground, the walls and the lighting)保存world文件为4_wheels_robot.wbt。
-
在给出创建机器人模型的规则之前,需要一些定义。
- 包含Solid节点及其所有派生节点的集合称为solid节点。类似的定义也适用于Device, Robot, Joint 和 Motor节点。机器人模型的主要结构是一个实体节点连接在一起的树。Joint节点用于在其父节点和子节点之间添加一个(或多个)自由度(DOF)。Joint节点的直接父节点和子节点都是实节点。从Joint派生的节点允许在链接的solid节点之间创建不同类型的约束。
- 在我们的例子中:机器人有4自由度,对应于车轮电机。它可以分为五个实体节点:身体和四个轮子。
b) 将机器人分成实体节点
-
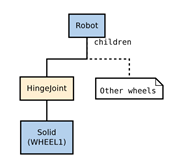
在场景树的最后,添加一个具有四个HingeJoints节点的Robot节点,该节点有一个Solid子节点
-
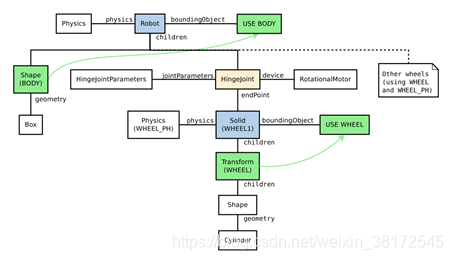
向robot节点添加包含Box geometry的shape节点。将形状的颜色设置为红色。使用该形状还可以定义机器人节点的boundingObject字段。Box的尺寸是(0.1,0.05,0.2)。为机器人添加一个Physics节点。图4表示定义机器人的所有节点。到目前为止,只实现了根robot节点的直接子节点。
c) 创建HingeJoints
-
添加一个HingeJointParameters节点。车轮的初始位置由实体节点的translation和rotation确定。而旋转原点(anchor)和旋转轴(axis)则由可选的铰节点的HingeJointParameters子节点定义。对于第一个轮子,实体平移应定义为(0.06,0,0.05),以便车身与轮子之间有相对间隙。HingeJointParameters-anchor也应定义为(0.06,0,0.05)来定义旋转原点(相对于body)。最后,HingeJointParameters-
axis在我们的例子中它沿着x轴,设为所以(1,0,0)。 -
完成缺失的节点,得到与图4所示相同的结构。将Transform节点Rotation设置为(0,0,1,Pi/2)。圆柱体的半径为0.04,高度为0.02。把轮子的颜色设为绿色。
-
为了能够驱动车轮,在每个铰链关节上添加一个RotationalMotor,并将它们的name字段设置为“wheel1”(注意不是DEF)。name命名之后,可以在控制器中直接使用。
d) 添加Sensors
-
如前所述,添加两个距离传感器。距离传感器与机器人前矢量成角度为0.3
[rad]。将它们的类型字段设置为“sonar”。将它们的图形和物理形状设置为边长为0.01的立方体(不是transform)[m]。设置它们的颜色为蓝色。同样的,给他们设置name字段。
e) 编写控制器
-
要对旋转电机进行编程,第一步是包含与RotationalMotor节点对应的API模块: #include <webots/motor.h>
-
然后初始化RotationalMotor
WbDeviceTag wheels[4];
char wheels_names[4][8] = {
"wheel1", "wheel2", "wheel3", "wheel4"
for (i=0; i<4 ; i++) wheels[i] = wb_robot_get_device(wheels_names[i]);
};- 可以通过设定电机的位置、速度、加速度或力来驱动电机(参见参考手册)。这里我们感兴趣的是设定它的速度。
double speed = -1.5; // [rad/s]
wb_motor_set_position(wheels[0], INFINITY);
wb_motor_set_velocity(wheels[0], speed);
- 注意,DistanceSensor节点的lookupTable字段指示传感器返回哪些值(参见参考手册)。
v. 参考程序如下:
#include <webots/robot.h>
#include <webots/motor.h>
#define TIME_STEP 64
int main(int argc, char **argv) {
wb_robot_init();
WbDeviceTag wheels[4];
char wheels_names[4][8] = {
"wheel1", "wheel2","wheel3", "wheel4"
};
int i;
for (i=0; i<4 ; i++)
wheels[i] = wb_robot_get_device(wheels_names[i]);
double speed = 1.5; // [rad/s]
for (i=0; i<4 ; i++)
{
wb_motor_set_position(wheels[i], INFINITY);
wb_motor_set_velocity(wheels[i], speed);
}
/* main loop
* Perform simulation steps of TIME_STEP milliseconds
* and leave the loop when the simulation is over
*/
while (wb_robot_step(TIME_STEP) != -1) {
/*
* Read the sensors :
* Enter here functions to read sensor
data, like:
* double val = wb_distance_sensor_get_value(my_sensor);
*/
/* Process sensor data here */
/*
* Enter here functions to send actuator
commands, like:
* wb_motor_set_position(my_actuator,
10.0);
*/
};
/* Enter your cleanup code here */
/* This is necessary to cleanup webots
resources */
wb_robot_cleanup();
return 0;
}
