OpenCV中minAreaRect() 函数和RotatedRect类参数详解
RotatedRect minAreaRect(InputArray points)
RotatedRect表示平面上的旋转矩形
class CV_EXPORTS RotatedRect
{
public:
//构造函数
RotatedRect();
RotatedRect(const Point2f& center, const Size2f& size, float angle);
RotatedRect(const CvBox2D& box);
void points(Point2f pts[]) const;//!返回矩形的4个顶点
Rect boundingRect() const; //返回包含旋转矩形的最小矩形
operator CvBox2D() const; //!转换到旧式的cvbox2d结构
Point2f center; //矩形的质心
Size2f size; //矩形的边长
float angle; //旋转角度,当角度为0、90、180、270等时,矩形就成了一个直立的矩形
};
这个类中包含了外接矩形的中心center、大小size以及角度angle,首先center是很好理解的,就是这个矩形的中心点位置,而angle代表的是旋转角度,size包含一个width和一个height,代表的是矩形的宽和高。
矩形的Width与Height定义:矩形坐标系中X轴逆时针旋转,碰到的第一条边为Width,另一条边为Height,其中矩形坐标系的原点为图像坐标系下矩形四个顶点中y值最大的点,如图所示:
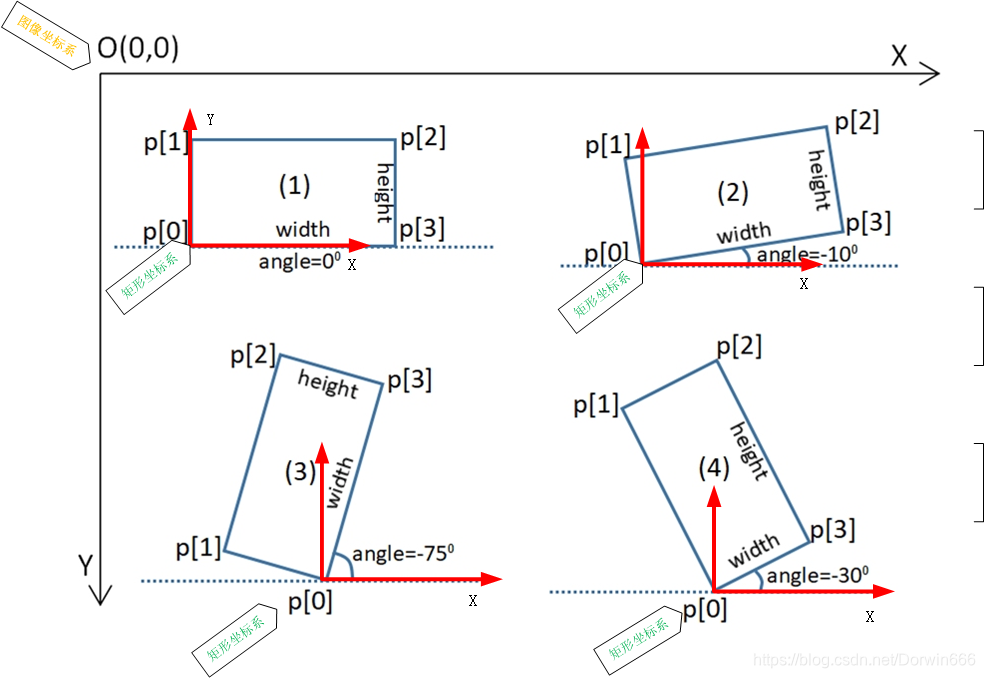
根据上图,说明以下几点:
-
Opencv采用通用的图像坐标系,左上角为原点O(0,0),X轴向右递增,Y轴向下递增,单位为像素。
-
矩形4个顶点位置的确定,是理解其它各变量的基础,其中p[0]点是关键。
顶点p[0]的位置可以这样理解:
ⓐ 如果没有边与坐标轴平行,则Y坐标最大的点为p[0]点,如矩形(2)(3)(4);
ⓑ 如果有边与坐标轴平行,则有两个Y坐标最大的点。此时,左侧的点为p[0]点。如矩形(1)。
即:Y坐标最大的点为p[0]。如果有两个最大的Y坐标,则左侧点(X坐标较小)为p[0]。 -
p[0]~p[3]按顺时针方向依次排列。
-
p[0]到p[3]之间的距离为宽width,其邻边为高height。
-
角度angle,是以矩形坐标系的X轴方向相同的射线为始边,按逆时针方向旋转到宽边Width所经过的角度,由于opencv定义顺时针方向为正,因此angle 取负值,取值范围为(-90, 0]。
-
中心点center为矩形对角线的交点。
例子:
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat test_image(200, 200, CV_8UC3, Scalar(0));
RotatedRect rRect = RotatedRect(Point2f(100, 100), Size2f(100, 50), 30);
/*获得角度*/
cout << rRect.angle << endl;
//角度30度
/*获得中心点*/
cout << rRect.center << endl;
//中心点[100, 100]
/*获得宽×高*/
cout << rRect.size << endl;
//宽×高[100 x 50]
/*获得宽*/
cout << rRect.size.width << endl;
// 100
/*获得高*/
cout << rRect.size.height << endl;
// 50
/*获得面积*/
cout << rRect.size.area() << endl;
//5000
//绘制旋转矩形
Point2f vertices[4];
rRect.points(vertices);
for (int i = 0; i < 4; i++)
line(test_image, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 0), 2);
//圈中这个旋转矩形的外矩形
Rect brect = rRect.boundingRect();
rectangle(test_image, brect, Scalar(255, 0, 0), 2);
imshow("rectangles", test_image);
waitKey(0);
return 0;
}
但是
opencv版本从4.1以后minAreaRect()返回的顶点和角的定义就改变了,p[0]定义为四个顶点中x值最小点,然后p[1]、p[2]、p[3]按顺时针旋转顺序定义,角度为90°减去上个版本原定义角度。width与height的定义应该没变,p[0]与p[1]之间的长度为height,另一边为width。额,测试了三个图型后得到的结论貌似是这样,还有待进一步验证。。。