视觉SLAM十四讲代码学习记录
问题:
已知一组3D点的位置,以及它们在某个相机中的投影位置,求该相机的位姿。(即书中的PnP问题)
求解方法:
对于连续运动的相机,可以通过最小化重投影误差(Bundle Adjustment)构建非线性最小二乘问题,采用最优化算法直接求解相机位姿。
优化模型:
T
∗
=
arg min
T
1
2
∑
i
=
1
n
∥
u
i
−
1
s
i
K
T
P
i
∥
2
2
T^* = \argmin_{T} \frac{1}{2}\sum_{i=1}^n \left\| u_i – \frac{1}{s_i} KTP_i \right\| _2^2
T
∗
=
T
a
r
g
m
i
n
2
1
i
=
1
∑
n
∥
∥
∥
∥
u
i
−
s
i
1
K
T
P
i
∥
∥
∥
∥
2
2
代码解读:
书中给出了高斯牛顿法和g2o实现非线性最小二乘问题的求解,阅读代码主要按照以下思路。
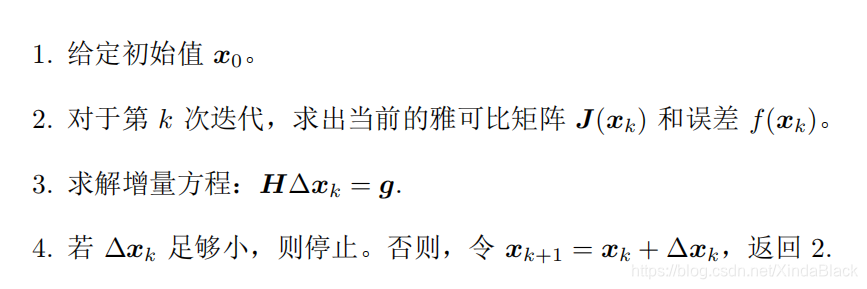
高斯牛顿法求解
//传入的参数分别是匹配好的一组3D点世界坐标‘points_3d’和它们在相机中的投影位置‘points_2d’,内参矩阵K,以及位姿的初始值‘pose’。(步骤1)
void bundleAdjustmentGaussNewton(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const Mat &K,
Sophus::SE3d &pose) {
typedef Eigen::Matrix<double, 6, 1> Vector6d;
const int iterations = 10;
double cost = 0, lastCost = 0;
double fx = K.at<double>(0, 0);
double fy = K.at<double>(1, 1);
double cx = K.at<double>(0, 2);
double cy = K.at<double>(1, 2);
//进行迭代(步骤2)
for (int iter = 0; iter < iterations; iter++) {
Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero();
Vector6d b = Vector6d::Zero();
cost = 0;
// compute cost
for (int i = 0; i < points_3d.size(); i++) {
//将3D点重投影到像素平面
Eigen::Vector3d pc = pose * points_3d[i];
double inv_z = 1.0 / pc[2];
double inv_z2 = inv_z * inv_z;
Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy);
//计算重投影误差
Eigen::Vector2d e = points_2d[i] - proj;
//计算损失函数
cost += e.squaredNorm();
Eigen::Matrix<double, 2, 6> J;
// 计算Jacabian
J << -fx * inv_z,
0,
fx * pc[0] * inv_z2,
fx * pc[0] * pc[1] * inv_z2,
-fx - fx * pc[0] * pc[0] * inv_z2,
fx * pc[1] * inv_z,
0,
-fy * inv_z,
fy * pc[1] * inv_z,
fy + fy * pc[1] * pc[1] * inv_z2,
-fy * pc[0] * pc[1] * inv_z2,
-fy * pc[0] * inv_z;
//计算增量方程的系数H和g(即代码中的b)
H += J.transpose() * J;
b += -J.transpose() * e;
}
//求解增量方程(步骤3),得到的dx为一个向量,即位姿变化量的李代数
Vector6d dx;
dx = H.ldlt().solve(b);
if (isnan(dx[0])) {
cout << "result is nan!" << endl;
break;
}
if (iter > 0 && cost >= lastCost) {
// cost increase, update is not good
cout << "cost: " << cost << ", last cost: " << lastCost << endl;
break;
}
// update your estimation
//更新位姿(步骤4),Sophus::SE3d::exp(dx)主要将位姿增量的李代数转换到李群。(注意:位姿的更新是左乘位姿变化量)
pose = Sophus::SE3d::exp(dx) * pose;
lastCost = cost;
cout << "iteration " << iter << " cost=" << cout.precision(12) << cost << endl;
if (dx.norm() < 1e-6) {
// converge
break;
}
}
cout << "pose by g-n: \n" << pose.matrix() << endl;
}
g2o求解
// vertex and edges used in g2o ba
// template <int D, typename T>
// D -> 顶点的最小维度,此处是相机的位姿,故维度为6;
// T -> 估计量的类型,此处是SE(3)
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
// 顶点重置
virtual void setToOriginImpl() override {
_estimate = Sophus::SE3d();
}
/// left multiplication on SE3,顶点(位姿)的更新
virtual void oplusImpl(const double *update) override {
Eigen::Matrix<double, 6, 1> update_eigen;
update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];
_estimate = Sophus::SE3d::exp(update_eigen) * _estimate;
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
};
// 顶点只有相机位姿,边是观测误差,一元边
class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {}
virtual void computeError() override {
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_pixel = _K * (T * _pos3d);
pos_pixel /= pos_pixel[2];
_error = _measurement - pos_pixel.head<2>();
}
//计算Jacobian matrix,此处是重投影误差关于相机位姿李代数的导数,书中式(7.46)。
virtual void linearizeOplus() override {
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_cam = T * _pos3d;
double fx = _K(0, 0);
double fy = _K(1, 1);
double cx = _K(0, 2);
double cy = _K(1, 2);
double X = pos_cam[0];
double Y = pos_cam[1];
double Z = pos_cam[2];
double Z2 = Z * Z;
_jacobianOplusXi
<< -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z,
0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z;
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
private:
Eigen::Vector3d _pos3d;
Eigen::Matrix3d _K;
};
void bundleAdjustmentG2O(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const Mat &K,
Sophus::SE3d &pose) {
// 构建图优化,先设定g2o
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
// 梯度下降方法,可以从GN, LM, DogLeg 中选
auto solver = new g2o::OptimizationAlgorithmGaussNewton(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
// vertex
VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose
vertex_pose->setId(0);
vertex_pose->setEstimate(Sophus::SE3d());
optimizer.addVertex(vertex_pose);
// K
Eigen::Matrix3d K_eigen;
K_eigen <<
K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2),
K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2),
K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2);
// edges
int index = 1;
for (size_t i = 0; i < points_2d.size(); ++i) {
auto p2d = points_2d[i];
auto p3d = points_3d[i];
EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);
edge->setId(index);
edge->setVertex(0, vertex_pose);
edge->setMeasurement(p2d);
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl;
pose = vertex_pose->estimate();
}
课后习题6的代码
第一个相机的观测也考虑,即第一个相机的位姿不固定,空间点还是固定的(本人是这么认为的)。现在图模型有两个顶点,即第一个相机的位姿和第二个相机的位姿;每个顶点都有许多一元边,即每个世界坐标中的3D在相机坐标中的投影,以观测方程描述。因此,原先代码中顶点和边的类都不需要改动。
// 估计两个相机的位姿,空间点固定,因此有两个顶点(相机位姿),每个顶点连接着许多一元边(观测模型)。
void bundleAdjustmentG2O(
const VecVector3d &points_3d, // 空间点坐标(这里借用空间点在第一个相机坐标系下的坐标,所以预期估计位姿T1为单位矩阵)
const VecVector2d &points_2d_1, // 第一个相机的观测值(像素坐标)
const VecVector2d &points_2d_2, // 第二个相机的观测值
const Mat &K,
Sophus::SE3d &pose) {
// 构建图优化,先设定g2o
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
// 梯度下降方法,可以从GN, LM, DogLeg 中选
// auto linearSolver = g2o::make_unique<LinearSolverType>();
// auto block_slover( g2o::make_unique<BlockSolverType>(move(linearSolver)) );
// auto solver = new g2o::OptimizationAlgorithmGaussNewton( move(block_slover));
auto solver = new g2o::OptimizationAlgorithmGaussNewton(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
// 设置第一个相机的顶点
VertexPose *vertex_pose1 = new VertexPose(); // camera vertex_pose1
vertex_pose1->setId(0); //从0开始
// vertex_pose1->setFixed(1); //固定顶点参数,不进行优化调整
vertex_pose1->setEstimate(Sophus::SE3d()); //设置相机位姿初始值为I
optimizer.addVertex(vertex_pose1);
// 设置第二个相机的顶点
VertexPose *vertex_pose2 = new VertexPose(); // camera vertex_pose2
vertex_pose2->setId(1);
vertex_pose2->setEstimate(Sophus::SE3d());
optimizer.addVertex(vertex_pose2);
// K
Eigen::Matrix3d K_eigen;
K_eigen <<
K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2),
K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2),
K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2);
// 第一个相机的观测模型
int index = 1;
for (size_t i = 0; i < points_2d_1.size(); ++i) {
auto p2d = points_2d_1[i];
auto p3d = points_3d[i];
EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);
edge->setId(index); //从1开始?
// 设置边连接的顶点,序号从0开始,一元边连接一个顶点,故只设置序号为0的顶点
edge->setVertex(0, vertex_pose1);
// 设置观测值
edge->setMeasurement(p2d);
// 信息矩阵:协方差矩阵之逆(注:观测误差e_k'*omega_k*e_k,这里omega取I)
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
// 第二个相机的观测模型
for (size_t i = 0; i < points_2d_2.size(); ++i) {
auto p2d = points_2d_2[i];
auto p3d = points_3d[i];
EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);
edge->setId(index);
edge->setVertex(0, vertex_pose2);
edge->setMeasurement(p2d);
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << "T1 by g2o =\n" << vertex_pose1->estimate().matrix() << endl;
cout << "T2 by g2o =\n" << vertex_pose2->estimate().matrix() << endl;
pose = vertex_pose2->estimate();
}
从运行的结果来看,第一个相机的位姿近似为单位矩阵,第二个相机的位姿与之前估计的一样,所以计是符合预期的。
calling bundle adjustment by g2o
iteration= 0 chi2= 413.221882 time= 3.2732e-05 cumTime= 3.2732e-05 edges= 152 schur= 0
iteration= 1 chi2= 301.367057 time= 2.1651e-05 cumTime= 5.4383e-05 edges= 152 schur= 0
iteration= 2 chi2= 301.365779 time= 2.0719e-05 cumTime= 7.5102e-05 edges= 152 schur= 0
iteration= 3 chi2= 301.365779 time= 2.0448e-05 cumTime= 9.555e-05 edges= 152 schur= 0
iteration= 4 chi2= 301.365779 time= 2.0007e-05 cumTime= 0.000115557 edges= 152 schur= 0
iteration= 5 chi2= 301.365779 time= 1.9868e-05 cumTime= 0.000135425 edges= 152 schur= 0
iteration= 6 chi2= 301.365779 time= 1.9566e-05 cumTime= 0.000154991 edges= 152 schur= 0
iteration= 7 chi2= 301.365779 time= 1.9637e-05 cumTime= 0.000174628 edges= 152 schur= 0
iteration= 8 chi2= 301.365779 time= 1.9577e-05 cumTime= 0.000194205 edges= 152 schur= 0
iteration= 9 chi2= 301.365779 time= 1.9597e-05 cumTime= 0.000213802 edges= 152 schur= 0
optimization costs time: 0.000445064 seconds.
T1 by g2o =
1 -4.8829624272e-10 5.12989017975e-10 -1.17821245254e-09
4.88296241894e-10 1 1.60949755627e-09 -2.926308116e-09
-5.12989018761e-10 -1.60949755602e-09 1 -1.4388309307e-09
0 0 0 1
T2 by g2o =
0.997866202583 -0.0516724161336 0.0399124436024 -0.127225965696
0.050595891596 0.998339762772 0.0275276919261 -0.00750729765631
-0.04126860183 -0.0254495477384 0.998823919929 0.0613858417711
0 0 0 1
课后习题7的代码
将空间点也作为优化变量考虑进来,需要增加路标顶点
VertexLandmark
和路标与位姿顶点之间的二元边
EdgeProjectXYZRGBD
。
class VertexLandmark : public g2o::BaseVertex<3, Eigen::Vector3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
//顶点的重置函数
virtual void setToOriginImpl() override {
_estimate = Eigen::Vector3d(0,0,0);
}
/// left multiplication on SE3 , 顶点的更新函数
virtual void oplusImpl(const double *update) override {
_estimate += Eigen::Vector3d(update[0],update[1],update[2]);
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
};
class EdgeProjectXYZRGBD : public g2o::BaseBinaryEdge<3, Eigen::Vector3d, VertexPose, VertexLandmark> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
//边的误差计算函数
virtual void computeError() override {
const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] );
const VertexLandmark *point= static_cast<const VertexLandmark *> ( _vertices[1] );
// 注意估计的是第二个相机的位姿 pose 以及空间点在第二个相机坐标系下的坐标 point,
// _measurement是空间点的世界坐标(即第一个相机坐标系下的坐标)
_error = _measurement - pose->estimate() * point->estimate();
}
/**
* 求Jacobian
* _jacobianOplusXi -> 误差对相机位姿的导数
* _jacobianOplusXj -> 误差对空间特征点的导数
*/
virtual void linearizeOplus() override {
VertexPose *pose = static_cast<VertexPose *>(_vertices[0]);
const VertexLandmark *point= static_cast<const VertexLandmark *> ( _vertices[1] );
Sophus::SE3d T = pose->estimate();
Eigen::Vector3d xyz_trans = T * point->estimate();
//误差对相机位姿李代数的导数 -1*[I,-P'^],其中-1为误差对第二个相机坐标系下特征点坐标的求导结果(de/dP')
_jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity(); //(0,0)为左上角的3*3的
_jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans);
//误差对世界坐标系下空间点的导数, -1*R
_jacobianOplusXj = -T.rotationMatrix();
}
bool read(istream &in) {}
bool write(ostream &out) const {}
};
// pts1 -> 第一个相机坐标系下的3D点坐标。优化中认为第一个相机坐标系为世界坐标系,则pts1作为观测值
// pts2 -> 第二个相机坐标系下的3D点坐标
// pts2Esti -> 待调整的第二个相机坐标系下的3D点坐标
void bundleAdjustment_7(
const vector<Point3f> &pts1, // [in]
const vector<Point3f> &pts2, // [in]
vector<Point3f> &pts2Esti, //[out]
Mat &R, Mat &t) { //[out]
// 构建图优化,先设定g2o
typedef g2o::BlockSolverX BlockSolverType;
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
// 梯度下降方法,可以从GN, LM, DogLeg 中选
auto solver = new g2o::OptimizationAlgorithmLevenberg(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
// 第二个相机的位姿
VertexPose *pose = new VertexPose(); // camera pose
pose->setId(0);
// Sophus::SE3d() -> Default constructor initializes rigid body motion to the identity. (默认初始化为单位矩阵)
// pose->setEstimate(Sophus::SE3d());
// 位姿的传入值作为估计的初始值
// Eigen::Matrix3d R_eigen;
// Eigen::Vector3d t_eigen;
// cv::cv2eigen(R,R_eigen);
// cv::cv2eigen(t,t_eigen);
// pose->setEstimate(Sophus::SE3d(R_eigen,t_eigen));
pose->setEstimate(Sophus::SE3d());
optimizer.addVertex(pose);
// 第二个相机坐标系下的3D点坐标
vector<VertexLandmark *> landmarks;
for(size_t i = 0; i < pts2.size(); i++ ){
VertexLandmark *point = new VertexLandmark(); // camera pose
point->setId(i+1);
// 设置空间点初始坐标为(1,2,3),不能用pts1作为初始值,因为位姿初始值取了I,会造成第一次迭代就终止,优化失败
point->setEstimate( Eigen::Vector3d(1, 2, 3 ) );
optimizer.addVertex(point);
landmarks.push_back(point);
}
// edges
vector<EdgeProjectXYZRGBD *> edges;
for (size_t i = 0; i < pts1.size(); i++) {
EdgeProjectXYZRGBD *edge = new EdgeProjectXYZRGBD();
edge->setVertex(0, pose);
edge->setVertex(1, landmarks[i]);
//此处设定第一个相机为初始帧,相机坐标系即世界坐标系,可以作为观测值
edge->setMeasurement(Eigen::Vector3d(
pts1[i].x, pts1[i].y, pts1[i].z));
edge->setInformation(Eigen::Matrix3d::Identity()); //信息矩阵设置为单位矩阵
optimizer.addEdge(edge);
edges.push_back(edge);
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << endl << "after optimization:" << endl;
cout << "T=\n" << pose->estimate().matrix() << endl;
// convert to cv::Mat
Eigen::Matrix3d R_ = pose->estimate().rotationMatrix();
Eigen::Vector3d t_ = pose->estimate().translation();
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
for(VertexLandmark * lm : landmarks){
Eigen::Vector3d tmp = lm -> estimate();
pts2Esti.push_back(cv::Point3f(tmp(0),tmp(1),tmp(2)));
}
double chi2 = 0;
cout << "The chi2 of every edge: " << endl;
for(EdgeProjectXYZRGBD* edge: edges){
cout << edge->chi2() << endl;
chi2 += edge->chi2();
}
cout << "The sum of chi2 of all edges : " << chi2 << endl;
//个别边的chi2相比较于其它边很大,是outlier,说明此特征点对匹配有误
}
从运行结果来看,将空间点也作为优化变量考虑,最终的chi2(cost function)可以接近为0,同时运行时间也变长很多。(个人在尝试取不同估计初始值的时候,发现估计的位姿T和空间点在第二个相机的坐标p2Esti结果有很大的不同,但是最终空间点的世界坐标R*p2Esti+t很准确(等于p1),感觉是对观测值过拟合了。分析具体原因:加入空间点作为优化变量后,对于此处局部的两个相机位姿估计,可以列举的观测方程数74少于变量的个数74+1,因此存在多种解的可能。)
iteration= 0 chi2= 11.241404 time= 0.00061704 cumTime= 0.00061704 edges= 74 schur= 0 lambda= 0.003207 levenbergIter= 1
iteration= 1 chi2= 0.137620 time= 0.000470106 cumTime= 0.00108715 edges= 74 schur= 0 lambda= 0.001069 levenbergIter= 1
iteration= 2 chi2= 0.000004 time= 0.000539606 cumTime= 0.00162675 edges= 74 schur= 0 lambda= 0.000356 levenbergIter= 1
iteration= 3 chi2= 0.000000 time= 0.000468944 cumTime= 0.0020957 edges= 74 schur= 0 lambda= 0.000238 levenbergIter= 1
iteration= 4 chi2= 0.000000 time= 0.000493249 cumTime= 0.00258894 edges= 74 schur= 0 lambda= 0.000158 levenbergIter= 1
iteration= 5 chi2= 0.000000 time= 0.000491616 cumTime= 0.00308056 edges= 74 schur= 0 lambda= 0.000106 levenbergIter= 1
iteration= 6 chi2= 0.000000 time= 0.000479153 cumTime= 0.00355971 edges= 74 schur= 0 lambda= 0.000070 levenbergIter= 1
iteration= 7 chi2= 0.000000 time= 0.0004667 cumTime= 0.00402641 edges= 74 schur= 0 lambda= 0.000047 levenbergIter= 1
iteration= 8 chi2= 0.000000 time= 0.00319919 cumTime= 0.00722561 edges= 74 schur= 0 lambda= 65.598463 levenbergIter= 7
iteration= 9 chi2= 0.000000 time= 0.000465908 cumTime= 0.00769152 edges= 74 schur= 0 lambda= 43.732309 levenbergIter= 1
optimization costs time: 0.00795365 seconds.
after optimization:
T=
0.999539 -0.017654 -0.0247169 -0.898792
0.0162139 0.998225 -0.0572988 -1.92858
0.0256846 0.0568716 0.998051 -1.44376
0 0 0 1
Compare p2 with p2Esti
p2 = [-0.0111479, -0.746763, 2.7652]
p2Esti = [0.986363, 1.31882, 4.09621]
verify p1 = R * p2Esti + t
p1 = [-0.0374123, -0.830816, 2.7448]
(R*p2Esti+t) = [-0.03741231993637884;
-0.8308156663209174;
2.744800061331437]
Compare p2 with p2Esti
p2 = [-0.299118, -0.0975683, 1.6558]
p2Esti = [0.76194, 1.96832, 2.90271]
verify p1 = R * p2Esti + t
p1 = [-0.243698, -0.117719, 1.5848]
(R*p2Esti+t) = [-0.2436983790622381;
-0.1177192871870092;
1.584800038768302]
Compare p2 with p2Esti
p2 = [-0.709645, 0.159033, 1.4212]
p2Esti = [0.376271, 2.23857, 2.65156]
verify p1 = R * p2Esti + t
p1 = [-0.627753, 0.160186, 1.3396]
(R*p2Esti+t) = [-0.6277526721105515;
0.1601862850961036;
1.339599942812919]
Compare p2 with p2Esti
p2 = [-0.399079, 0.12047, 1.4838]
p2Esti = [0.681778, 2.18293, 2.73404]
verify p1 = R * p2Esti + t
p1 = [-0.323443, 0.104873, 1.4266]
(R*p2Esti+t) = [-0.3234430027320211;
0.1048728320349044;
1.426599983250943]
Compare p2 with p2Esti
p2 = [-0.709709, 0.100216, 1.3998]
p2Esti = [0.375131, 2.17834, 2.62696]
verify p1 = R * p2Esti + t
p1 = [-0.627221, 0.101454, 1.3116]
(R*p2Esti+t) = [-0.6272212118287084;
0.1014538330490162;
1.311599858805601]