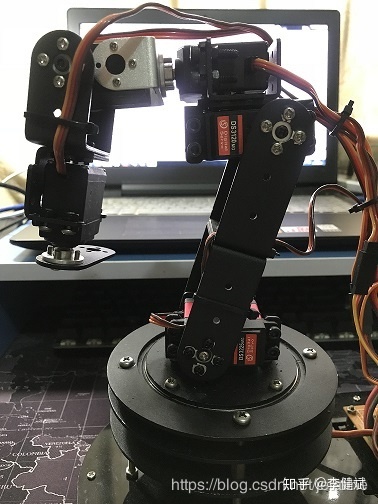
一、五轴舵机机器人 利用D-H参数搭建机器人模型,计算运动学正逆解,运行关节插补和直线插补运动。
源码仓库:https://github.com/Jelatine/arm-robot-arduino
二、3D高达游戏
使用Qt+OpenGL编写程序,硬件方面使用Raspberry Pi 2、陀螺仪、按钮等组成。
源码仓库:https://github.com/Jelatine/pi_opengl
三、升级版六轴舵机机器人
在五轴基础上添加第六关节,设计成与ABB、KUKA部分六轴机器人的D-H模型:
四、三维建模软件
基于Qt+OpenCASCADE编写一个简单的三维建模和仿真的软件。
详情:https://blog.csdn.net/jelatine/article/details/84594336
源码仓库:https://github.com/Jelatine/JellyCAD