时间:2021-8-17
为了可以让自己使用起点、终点和弧度(方向)来直接绘制圆弧,我准备自己开发一个绘制圆弧的函数。在网上查了很多资料,并没有查到自己想要的。
1、说明
这里的起点、终点指的是圆弧通过的两点。而弧度方向指的是圆弧起点弧线的“切线”方向,下面用角度θ来表示,逆时针方向为正,顺时针方向为负。

如上图所示,已知P1、P2平面坐标和∠θ,需要利用QT绘图工具绘制出这一段圆弧。用户只需要输入P1、P2、P3三点即可,其中P3只要方向在直线P1P3方向上即可。
需要求出:
① 圆心C点坐标和半径R,其中R=CP1和CP2线段长度;
② 角度∠P1-C-X、∠P2-C-X的角度,可以看出角之间相差2θ度。
2、算法如下:
点M的坐标:(P1+P2)/2,P1P2和水平线的夹角角度=argtan((P2.y-P1.y)/(P2.x-P1.x)),设为ð
设P1-M的长度= L,则 半径R=P1-C长度=L/sinθ
C.x = P1.x + R / cos(90 – θ – ð)
C.y = P1.y + R / sin(90 – θ – ð) 即可得到C点坐标。
得到C点坐标后,易得,以C点为中心,边长为2R的矩形(该矩形即为QT所要求矩形)。
通过P1-C坐标求出 ∠P1-C-x即为圆弧起始角,易得∠P2-C-x角度。即为QT绘制圆弧的两个角度。
最后调用QT绘图方法即可。
3、QT程序代码
3.1 QT 绘图命令简介:
void QPainter::drawArc(const
QRectF
&rectangle, int startAngle, int spanAngle)
Draws the arc defined by the given rectangle, startAngle and spanAngle.
The startAngle and spanAngle must be specified in 1/16th of a degree, i.e. a full circle equals 5760 (16 * 360). Positive values for the angles mean counter-clockwise while negative values mean the clockwise direction. Zero degrees is at the 3 o’clock position.
以上命令主要内容为需要通过一个给定的矩形和起始角、偏移角来绘制圆弧。起始角和偏移角必须必须是度数的十六分之一。即1°表示为1*16,直角90°表示为90*16。举例如下:
QRectF rectangle(10.0, 20.0, 80.0, 60.0); //给定的矩形,我们会直接用正方形来绘制正圆弧
int startAngle = 30 * 16; //起始角,以3点方向为0°,逆时针为整。
int spanAngle = 120 * 16; //偏移角,就是起始角和终止角的差值。绘制整个圆就输入360 * 16
QPainter painter(this);
painter.drawArc(rectangle, startAngle, spanAngle); //调用绘图命令
上面例子绘出的圆弧为:
3.2 我们的程序如下,程序变量可能与上述代号不同,请注意体会
int Helper::caculateArcParameters(arcParameters * arcPara, inputParameters inputPara)
{
//返回struct arcParameters指针,使用指针而不是直接返回arcParameters变量仅仅是因为可以判断是否为NULL。
//判断是否可以做圆弧,否则返回空NULL
//角度为0, 或者两点坐标重合,返回NULL
double x1 = inputPara.x1;
double y1 = inputPara.y1;
double x2 = inputPara.x2;
double y2 = inputPara.y2;
double jiaoDu = inputPara.jiaoDu; //本段弧线的弧度或角度 θ
int yinYong = inputPara.yinYong;
if ((jiaoDu == 0)or(yinYong != 0)or((x1 == x2)and(y1 == y2))){
return 1; //当没有弧度,或者有引用时,或者两点坐标重合时,返回1。正确返回0,如下。
}else{
// double mx = (x1+x2)/2; double my = (y1+y2)/2;
double L = qSqrt((x2-x1)*(x2-x1) + (y2-y1)*(y2-y1)); //两点之间距离。调试正确
double R = qAbs((0.5 * L) / qSin(jiaoDu)); //圆弧所在圆的半径 qsin都是弧度,角度需要转换。
double orginJiaoDu = qAtan((y2-y1)/(x2-x1)); //起点终点组成的角度ð(单位弧度)
double C_x = x1 + R / qCos(qDegreesToRadians(90.0) - jiaoDu + orginJiaoDu); //圆心坐标x
double C_y = y1 + R / qSin(qDegreesToRadians(90.0) - jiaoDu + orginJiaoDu); //弧度相互加减
qDebug()<<"orginjiaoDu:"<<orginJiaoDu<<" jiaodu:"<<jiaoDu;
qDebug()<<"\n R:"<<R;
qDebug()<<"\n C_x:"<<C_x<<" C_y:"<<C_y;
arcPara->rectParameter = QRectF(C_x - R, C_y - R, 2 * R, 2 * R);
arcPara->startAngleParameter = qRadiansToDegrees(qAtan((y2 - C_y)/(x2 - C_x))) * 16; //y方向取负值
arcPara->spanAngleParameter = arcPara->startAngleParameter - qRadiansToDegrees(2 * jiaoDu) * 16;
// arcPara->spanAngleParameter = 360 * 16;
return 0;
}
}3.3 以上程序还在调试中,希望可以对大家啊有所帮助。
函数通过一个结构指针返回计算结果,通过一个结构传输数据,结构定义如下:
truct arcParameters
{
QRectF rectParameter;
int startAngleParameter;
int spanAngleParameter;
};
struct inputParameters
{
double x1;
double y1;
double x2;
double y2;
double jiaoDu;
int yinYong;
};
3.4 程序运行效果
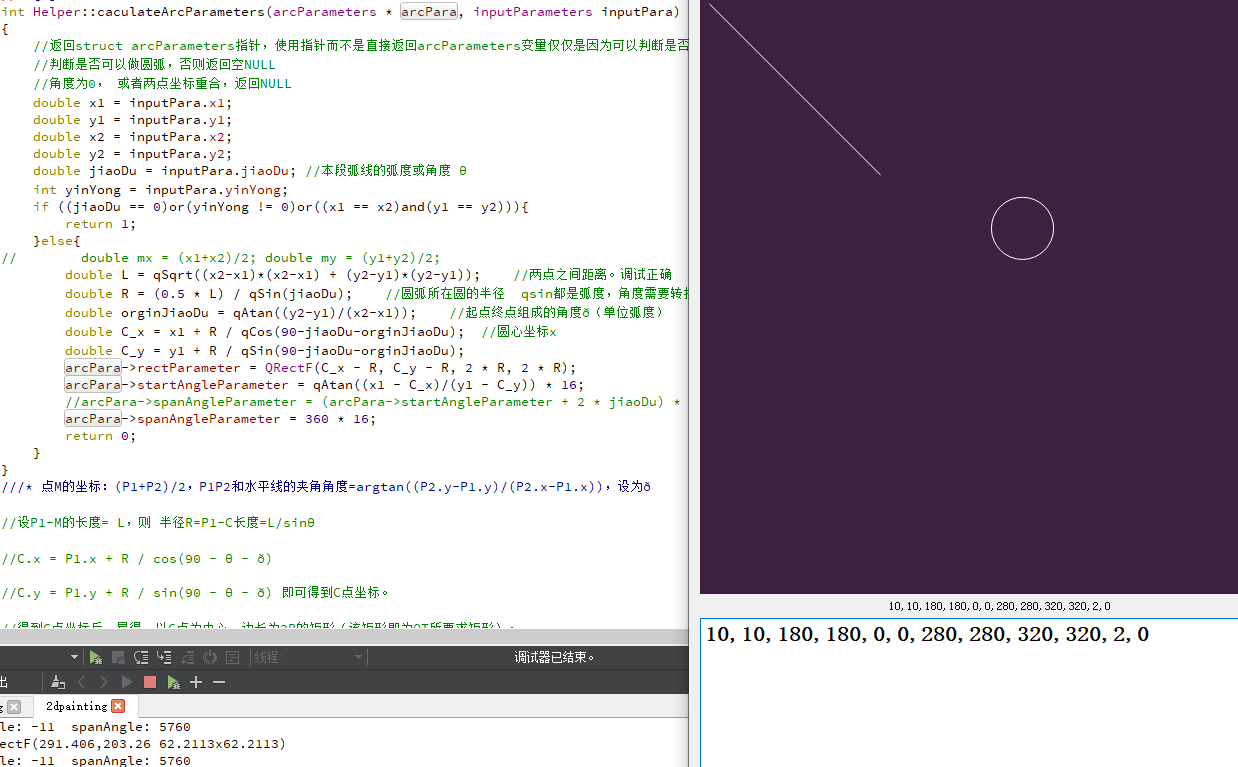
这个程序的运行效果如上,上面图形可以根据下面输入数据来绘图。 来定制绘图。
这么做的目的是通过文本来保存图形。
注,程序还在优化中。
4. 结束
4.1 经过不屑的努力,程序终于能正常运算了。主要困难再坐标转换和三角函数中出现的基础错误。整体思路没有问题。
最主要的函数如下,如果对您有帮助,还请多支持。
int Helper::caculateArcParameters(arcParameters * arcPara, inputParameters inputPara)
{
//返回struct arcParameters指针,使用指针而不是直接返回arcParameters变量仅仅是因为可以判断是否为NULL。
//判断是否可以做圆弧,否则返回空NULL
//角度为0, 或者两点坐标重合,返回NULL
//[1]输入数据为x-y坐标,角度不变(逆时针为正),并判断输入数据是否合理。
double x1 = inputPara.x1;
double y1 = inputPara.y1;
double x2 = inputPara.x2;
double y2 = inputPara.y2;
double radianOfDirect = inputPara.direct; //本段弧线的弧度 θ,表示起点方向偏离P1P2方向的角度,逆时针为正。
int id = inputPara.idOfRefer;
const double radianOf90 = qDegreesToRadians(90.0);
if ((radianOfDirect == 0)or(qAbs(radianOfDirect) >= radianOf90 * 2)){
return 1; //大于180度 = 0 时退出确保方向位于 (0--180)之间,不含0和180度。
};
if ((id != 0)or((x1 == x2)and(y1 == y2))){
return 1;
}; //退出函数, 否则继续下面语句
//[2] 计算P1、P2和X轴角度angleOfP1P2、中点M坐标及向量(M,P1),(M,P2)长度; 和半径radius
double angleOfP1P2 = qDegreesToRadians(getAngle((x2 - x1),(y2 - y1)));
double m_x = (x1+x2)/2;
double m_y = (y1+y2)/2;
// double vectorMp2_x = x2 - m_x;
// double vectorMp2_y = y2 - m_y;
double lengthOfMP2 = qSqrt((x2 - m_x)*(x2 - m_x) + (y2 - m_y)*(y2 - m_y)); //两点之间距离。调试正确
double radius = qAbs(lengthOfMP2 / sin(radianOfDirect));
double vectorP2N_x; //P2指向圆心的单位长度向量
double vectorP2N_y;
double angleOfStart;
double angleOfSpan;
double C_x = 0;
double C_y = 0;
//[3]根据角度正负,优弧劣弧分别计算圆心坐标C_x C_y。先算单位P2指向圆心的向量再乘以半径长度即可。
if (radianOfDirect > 0){
//角度大于0
vectorP2N_x = cos(angleOfP1P2)*cos(-radianOfDirect - radianOf90) - sin(angleOfP1P2)*sin(-radianOfDirect - radianOf90);
vectorP2N_y = sin(angleOfP1P2)*cos(-radianOfDirect - radianOf90) + cos(angleOfP1P2)*sin(-radianOfDirect - radianOf90);
}else if (radianOfDirect < 0){
//角度小于0
vectorP2N_x = cos(angleOfP1P2)*cos(-radianOfDirect + radianOf90) - sin(angleOfP1P2)*sin(-radianOfDirect + radianOf90);
vectorP2N_y = sin(angleOfP1P2)*cos(-radianOfDirect + radianOf90) + cos(angleOfP1P2)*sin(-radianOfDirect + radianOf90);
}else{
return 1;//应该不会执行。
};
//所有情况C坐标均等于P2 + P2N向量乘以倍率!
C_x = x2 + vectorP2N_x * radius;
C_y = y2 + vectorP2N_y * radius;
qDebug()<<"P1P2-X角度:"<<angleOfP1P2<<" 圆弧弧度方向:"<<radianOfDirect;
qDebug()<<"半径:"<<radius;
qDebug()<<"C_x:"<<C_x<<" C_y:"<<C_y;
qDebug()<<"x1,y1:"<<x1<<"__"<<y1;
qDebug()<<"x2,y2:"<<x2<<"__"<<y2;
//[4]根据角度,分别计算起始角度和偏转角度
// angleOfStart = 0;
// angleOfSpan = 90;// 验证的确时再“第四”象限。
/* !!!坐标改为普通X-Y坐标后,角度的起始角度也有所变化。此时角度时逆时针旋转的!!! */
if (radianOfDirect > 0){
//角度大于0,弧度向P1P2的左边弯曲,此时圆弧从P2到P1(顺时针)。
angleOfStart = 360-getAngle((x1 - C_x), (y1 - C_y));// * 16;
angleOfSpan = 360-getAngle((x2 - C_x), (y2 - C_y)) - angleOfStart;// * 16;
}else if (radianOfDirect < 0){
//角度小于0,与上面相反。圆弧为P1到P2
angleOfStart = 360-getAngle((x2 - C_x), (y2 - C_y));// * 16;
angleOfSpan = 360-getAngle((x1 - C_x), (y1 - C_y)) - angleOfStart;// * 16;
}else{
return 1;//应该不会执行。
};
//[5]把坐标Y值取负后,转换为y-x坐标,赋值给arcPara,返回0
arcPara->rect = QRectF(C_x - radius, C_y - radius, 2 * radius, 2 * radius);
qDebug()<<"StartAngle, SpanAngle:"<<angleOfStart<<" "<<angleOfSpan;
// angleOfStart = 340;
// angleOfSpan = 50;
if (angleOfSpan < 0) angleOfSpan += 360;
arcPara->angleOfStart = angleOfStart * 16;
arcPara->angleOfSpan = angleOfSpan * 16;
return 0;
};
double Helper::getAngle(double x, double y) {
double l = qSqrt(x*x + y*y);
double a = qAcos(x/l);
double ret = a * 180 / qDegreesToRadians(180.0); //弧度转角度,方便调试
if (y < 0) {
return 360 - ret;
}
return ret;
};

4.2 最终结果截图如下:
可以看出,不论P1 P2起始角如何变化,总能正确的绘制出圆弧。
