
MicroPython顾名思义就是可以在单片机上跑的Python,借助Micro Python,用户完全可以通过Python脚本语言实现硬件底层的访问和控制,比如说控制LED灯泡、LCD显示器、读取电压、控制电机、访问SD卡等。目前支持MicroPython的开发板有好几种,下面就以TPYBoard为例,简单介绍一下简易温度传感器的制作方法。
1、实验目的
1. 学习在PC机系统中扩展简单I/O 接口的方法。
2. 进一步学习编制数据输出程序的设计方法。
3. 学习DS18B20的接线方法,并利用DS18B20检测当前温度
3. 学习8*8LED点阵接线方法,并将当前温度显示
2、所需元器件
TPYBoard板子一块
数据线一条
杜邦线若干
8*8LED点阵一个
DS18B20温度传感器一个
3、学习DS18B20的接线方法,检测当前温度
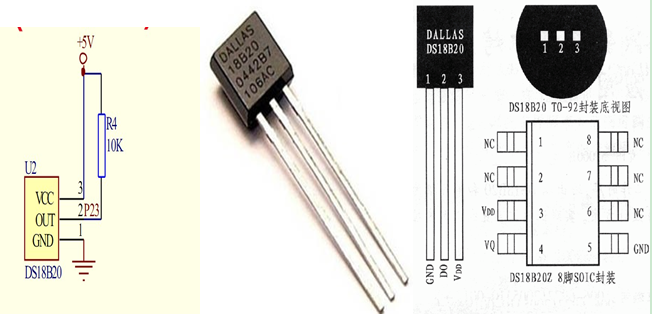
先看一下DS18B20针脚含义,如上图:
TPYBoard的针脚与DS18B20的针脚对应关系如下:
TPYBoard DS18B20
—————-
# 3V3 or any Pin => VDD
# any Pin => DO
# GND => GND
还是看不明白的话,直接上针脚编号
TPYBoard LCD5110
—————————-
3.3v => VDD
GND => GND
Y10 => DO
接线ok后,在MicroPython的源码目录中,进入drivers\onewire\目录,然后将目录下的文件ds18x20.py和onewire.py复制到PYBFLASH磁盘的根目录。复制文件后要安全退出磁盘,然后重新接入,不然找不到文件,即可运行main.py文件了,打印温度,即可用Putty看到当前的温度。
main.py源代码:
#main.py
import pyb
from pyb import Pin
from ds18x20 import DS18X20
Pin("Y11",Pin.OUT_PP).low()#GND
Pin("Y9",Pin.OUT_PP).high()#VCC
pyb.delay(100)
DQ=DS18X20(Pin('Y10'))#DQ
while True:
tem = DQ.read_temp()
print(tem)
pyb.delay(1000)
4、点亮8*8LED点阵

点阵后面有两排针脚,一排以1开头,即1-8针脚,一排以9开头,即9-16针脚,上图中〇中的数字对应的即为针脚的对应的数字,当ROW 的PIN NO.高电平,COL PIN NO.低电平时候,我们的LED即全部点亮了,为了方便操作行和列,我们可以将ROW的8个引脚接到我们TPYBoard的X1-X8,COL的8个引脚接到我们TPYBoard的Y1-Y8,这样我们控制X引脚Y引脚就可以控制哪个点亮跟灭了,想显示任何字都没问题,快来试试吧。
5、点将温度显示在8*8LED点阵上
接线成功以后,我们将测试出温度通过分割函数将十位,个位,小数点,以及后面的数字显示出来,代码如下:
import pyb
from pyb import Pin
from ds18x20 import DS18X20
x_PIN = [Pin(i, Pin.OUT_PP) for i in ['X1','X2','X3','X4','X5','X6','X7','X8']]
y_PIN = [Pin(i, Pin.OUT_PP) for i in ['Y1','Y2','Y3','Y4','Y5','Y6','Y7','Y8']]
temp=['0000,0110,0110,0110,0110,0110,0110,0000','1101,1101,1101,1101,1101,1101,1101,1101,
'0000,1110,1110,0000,0111,0111,0111,0000','0000,1110,1110,0000,1110,1110,1110,0000',
'0101,0101,0101,0000,1101,1101,1101,1101','0000,0111,0111,0000,1110,1110,1110,0000',
'0000,0111,0111,0000,0110,0110,0110,0000','0000,1110,1110,1110,1110,1110,1110,1110',
'0000,0110,0110,0000,0110,0110,0110,0000','0000,0110,0110,0000,1110,1110,1110,0000']
tempValue=0
def show(l_num,r_num):
flag=0
for x_ in range(0,8):
for x_ in range(0,8):
if x_!=flag:
x_PIN[x_].value(0)
left_ = temp[l_num]
left_item=left_.split(',')
right_ = temp[r_num]
right_item=right_.split(',')
li_l=left_item[flag]
li_r=right_item[flag]
y_PIN[0].value(int(li_l[:1]))
y_PIN[1].value(int(li_l[1:2]))
y_PIN[2].value(int(li_l[2:3]))
y_PIN[3].value(int(li_l[3:4]))
y_PIN[4].value(int(li_r[:1]))
y_PIN[5].value(int(li_r[1:2]))
y_PIN[6].value(int(li_r[2:3]))
y_PIN[7].value(int(li_r[3:4]))
x_PIN[flag].value(1)
flag=flag+1
pyb.delay(2)
def display(time_,l_num,r_num):
for x in range(0,time_):
for y in range(0,110):
show(l_num,r_num)
if __name__=='__main__':
#time_t=Timer(4,freq=5,callback=randSensor)
DQ=DS18X20(Pin('Y10'))#DQ
while 1:
tempValue =int(DQ.read_temp())
print(tempValue)
l_n=tempValue//10
r_n=tempValue%10
print(l_n)
print(r_n)
display(60,l_n,r_n)
for i in x_PIN:
i.value(0)转载于:https://my.oschina.net/micropython/blog/751145