在OFDM系统中,为了估计出信号传输遇到的时间偏移和频率偏移,可以采用导频进行估计。
发射端模型假设
我们假设如下模型:
一个时隙有14个ofdm符号,每个符号有1024个子载波。
其中792个子载波是数据子载波,232个子载波是空载波。
其中OFDM3和OFDM13的792个子载波中含有dmrs导频符号(频域)。
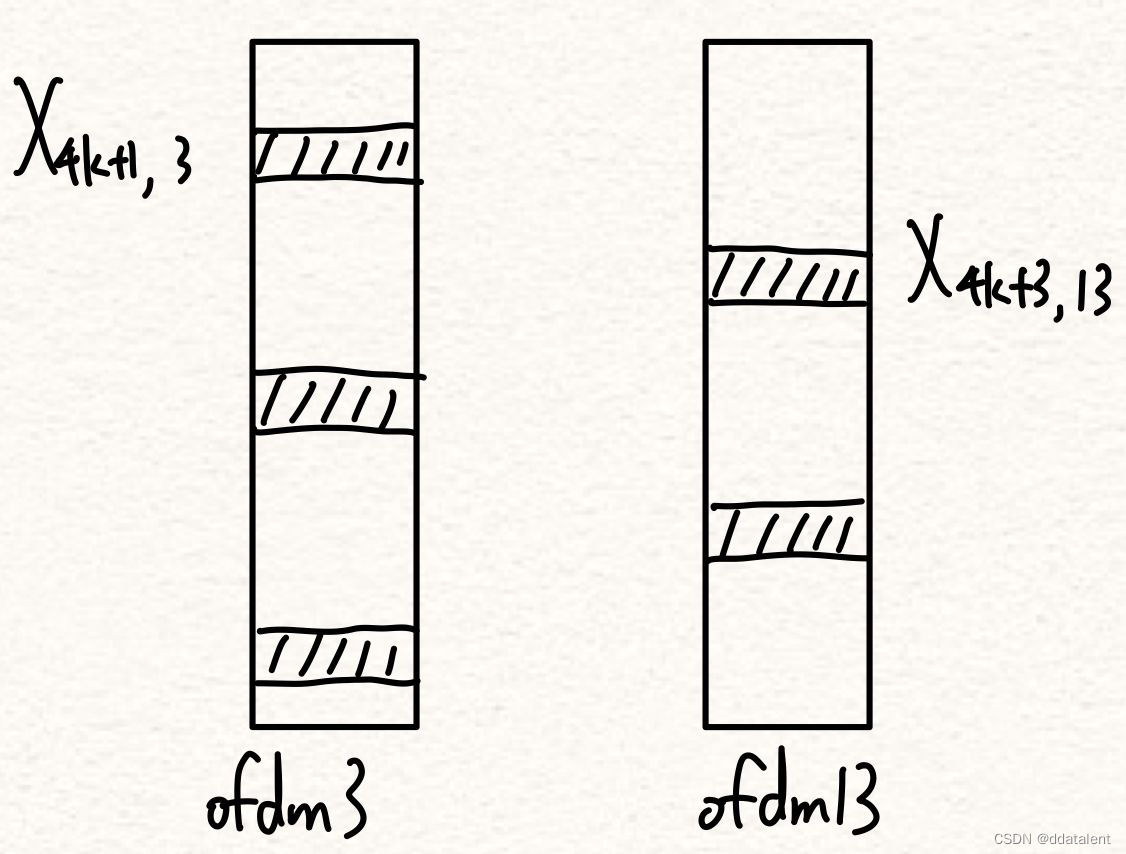
图中所示分别为ofdm3和ofdm13的频域帧结构,阴影部分为dmrs导频,其他地方为空。ofdm3和ofdm13的导频结构正交,导频间隔4个子载波,在792个有效子载波中共有198个导频符号。
X
4
k
+
1
,
3
表示
o
f
d
m
3
中导频位置为第
4
k
+
1
个子载波,
k
=
0
−
197
X_{4k+1,3}表示ofdm3中导频位置为第4k+1个子载波,k=0 – 197
X
4
k
+
1
,
3
表示
o
fd
m
3
中导频位置为第
4
k
+
1
个子载波,
k
=
0
−
197
X
4
k
+
3
,
13
表示
o
f
d
m
13
中导频位置为第
4
k
+
3
个子载波,
k
=
0
−
197
X_{4k+3,13}表示ofdm13中导频位置为第4k+3个子载波,k=0 – 197
X
4
k
+
3
,
13
表示
o
fd
m
13
中导频位置为第
4
k
+
3
个子载波,
k
=
0
−
197
构建发射端模型为:
x
n
,
M
=
1
N
∑
k
=
−
512
511
X
k
,
M
e
j
2
π
n
k
N
,
n
=
1
−
1024
x_{n,M} = \frac{1}{N} \sum_{k=-512}^{511} X_{k,M} e^{j\frac{2\pi nk}{N}} , n=1-1024
x
n
,
M
=
N
1
k
=
−
512
∑
511
X
k
,
M
e
j
N
2
πnk
,
n
=
1
−
1024
x
n
,
M
x_{n,M}
x
n
,
M
为时域第M个ofdm符号的第n个码片,
X
k
,
M
X_{k,M}
X
k
,
M
为频域第M个ofdm符号的第k个子载波符号。
经过信道传输后,引入时延
τ
\tau
τ
和频偏
f
d
f_d
f
d
接收端模型假设
则接收端接收模型可表示为:
y
n
,
M
=
h
⨂
x
n
−
τ
,
M
e
j
2
π
f
d
t
M
+
w
n
,
M
y_{n,M}= h\bigotimes x_{n-\tau,M} e ^{j2\pi f_d t_M} + w_{n,M}
y
n
,
M
=
h
⨂
x
n
−
τ
,
M
e
j
2
π
f
d
t
M
+
w
n
,
M
其中,
t
M
t_M
t
M
表示接收到ofdm M的时间,不妨假设
t
3
=
0
t_3=0
t
3
=
0
,
t
13
=
△
t
t_{13}=\bigtriangleup t
t
13
=
△
t
。
w
n
,
M
w_{n,M}
w
n
,
M
表示噪声。
假设信道是时域上不变,频域上变化的。即对于同一个子载波,不同时间的信道响应是相同的。但是同一时间,不同子载波的信道响应不相同。
将上式转换为频域表达式可得
Y
k
,
3
=
H
k
X
k
,
3
e
−
j
2
π
k
N
τ
+
W
k
,
3
Y_{k,3}=H_{k} X_{k,3} e^{-j \frac{2\pi k}{N} \tau} +W_{k,3}
Y
k
,
3
=
H
k
X
k
,
3
e
−
j
N
2
πk
τ
+
W
k
,
3
Y
k
,
13
=
H
k
X
k
,
13
e
−
j
2
π
k
N
τ
e
j
2
π
f
d
△
t
+
W
k
,
13
Y_{k,13}=H_{k} X_{k,13} e^{-j \frac{2\pi k}{N} \tau} e^{j 2\pi f_d \bigtriangleup t}+W_{k,13}
Y
k
,
13
=
H
k
X
k
,
13
e
−
j
N
2
πk
τ
e
j
2
π
f
d
△
t
+
W
k
,
13
观察第一个表达式我们可以得知,时延
τ
\tau
τ
产生的相偏影响对于同一个ofdm符号的不同子载波是不同的,但是与时间无关,也就是对每个ofdm符号的影响是相同的。
观察第二个表达式我们可以得知,频偏
f
d
f_d
f
d
对ofdm系统产生的相偏影响与时间t有关,和子载波k无关。也就是对于不同ofdm符号的影响是不同的,但是对于同一个ofdm符号的不同子载波是相同的
我们的目的就是估计出时延
τ
\tau
τ
和频偏
f
d
f_d
f
d
时延估计(时间跟踪)
在已知导频的情况下,我们只需要提取出导频位置的子载波进行如下计算(*表示共轭):
Y
4
k
+
1
,
3
X
4
k
+
1
,
3
∗
=
∣
X
4
k
+
1
,
3
∣
2
H
4
k
+
1
e
−
j
2
π
(
4
k
+
1
)
N
τ
+
W
4
k
+
1
,
3
Y_{4k+1,3}X_{4k+1,3}^* = |X_{4k+1,3}|^2 H_{4k+1} e^{-j \frac{2\pi (4k+1)}{N} \tau}+W_{4k+1,3}
Y
4
k
+
1
,
3
X
4
k
+
1
,
3
∗
=
∣
X
4
k
+
1
,
3
∣
2
H
4
k
+
1
e
−
j
N
2
π
(
4
k
+
1
)
τ
+
W
4
k
+
1
,
3
Y
4
k
+
3
,
13
X
4
k
+
3
,
13
∗
=
∣
X
4
k
+
3
,
13
∣
2
H
4
k
+
3
e
−
j
2
π
(
4
k
+
3
)
N
τ
e
j
2
π
f
d
△
t
+
W
4
k
+
3
,
3
Y_{4k+3,13}X_{4k+3,13}^* = |X_{4k+3,13}|^2 H_{4k+3} e^{-j \frac{2\pi (4k+3)}{N} \tau}e^{j 2\pi f_d \bigtriangleup t}+W_{4k+3,3}
Y
4
k
+
3
,
13
X
4
k
+
3
,
13
∗
=
∣
X
4
k
+
3
,
13
∣
2
H
4
k
+
3
e
−
j
N
2
π
(
4
k
+
3
)
τ
e
j
2
π
f
d
△
t
+
W
4
k
+
3
,
3
考虑到ofdm3和ofdm13的导频是正交的,他们所对应的子载波不同,他们不能直接共轭相乘,因此需要做如下步骤假设:
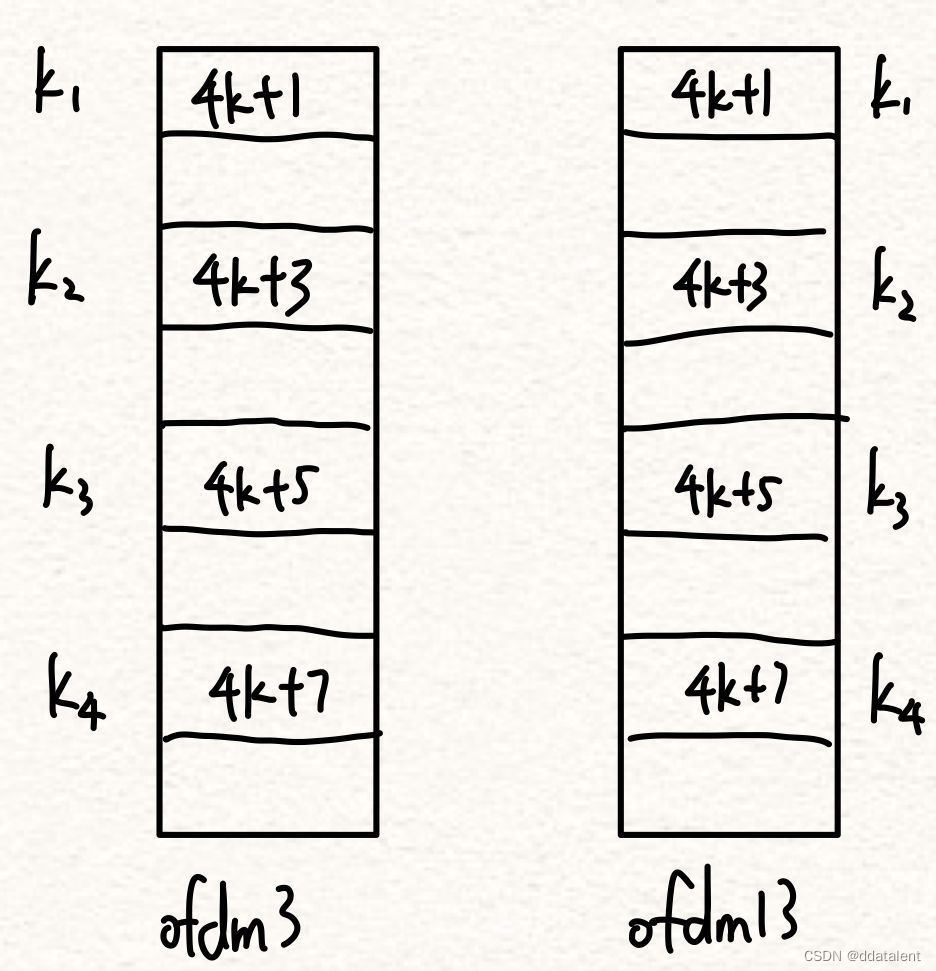
可以将上式化简为
Y
k
1
,
3
X
k
1
,
3
∗
=
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
2
π
k
1
N
τ
+
W
k
1
,
3
Y_{k_1,3}X_{k_1,3}^* = |X_{k_1,3}|^2 H_{k_1} e^{-j \frac{2\pi k_1}{N} \tau}+W_{k_1,3}
Y
k
1
,
3
X
k
1
,
3
∗
=
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
N
2
π
k
1
τ
+
W
k
1
,
3
Y
k
3
,
3
X
k
3
,
3
∗
=
∣
X
k
3
,
3
∣
2
H
k
3
e
−
j
2
π
k
3
N
τ
+
W
k
3
,
3
Y_{k_3,3}X_{k_3,3}^* = |X_{k_3,3}|^2 H_{k_3} e^{-j \frac{2\pi k_3}{N} \tau}+W_{k_3,3}
Y
k
3
,
3
X
k
3
,
3
∗
=
∣
X
k
3
,
3
∣
2
H
k
3
e
−
j
N
2
π
k
3
τ
+
W
k
3
,
3
Y
k
2
,
13
X
k
2
,
13
∗
=
∣
X
k
2
,
13
∣
2
H
k
2
e
−
j
2
π
k
2
N
τ
e
j
2
π
f
d
△
t
+
W
k
2
,
3
Y_{k_2,13}X_{k_2,13}^* = |X_{k_2,13}|^2 H_{k_2} e^{-j \frac{2\pi k_2}{N} \tau}e^{j 2\pi f_d \bigtriangleup t}+W_{k_2,3}
Y
k
2
,
13
X
k
2
,
13
∗
=
∣
X
k
2
,
13
∣
2
H
k
2
e
−
j
N
2
π
k
2
τ
e
j
2
π
f
d
△
t
+
W
k
2
,
3
Y
k
4
,
13
X
k
4
,
13
∗
=
∣
X
k
4
,
13
∣
2
H
k
4
e
−
j
2
π
k
4
N
τ
e
j
2
π
f
d
△
t
+
W
k
4
,
3
Y_{k_4,13}X_{k_4,13}^* = |X_{k_4,13}|^2 H_{k_4} e^{-j \frac{2\pi k_4}{N} \tau}e^{j 2\pi f_d \bigtriangleup t}+W_{k_4,3}
Y
k
4
,
13
X
k
4
,
13
∗
=
∣
X
k
4
,
13
∣
2
H
k
4
e
−
j
N
2
π
k
4
τ
e
j
2
π
f
d
△
t
+
W
k
4
,
3
接下来我们令:
(
Y
k
1
,
3
X
k
1
,
3
∗
)
(
Y
k
3
,
3
X
k
3
,
3
∗
)
∗
=
(
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
2
π
k
1
N
τ
+
W
k
1
,
3
)
(
∣
X
k
3
,
3
∣
2
H
k
3
e
−
j
2
π
k
3
N
τ
+
W
k
3
,
3
)
∗
=
∣
X
k
1
,
3
∣
2
∣
X
k
3
,
3
∣
2
H
k
1
H
k
3
∗
e
−
j
2
π
k
1
N
τ
e
j
2
π
k
3
N
τ
+
W
3
假设信道平坦,我们可以得到
H
k
1
=
H
k
3
,此处
W
3
指代所有的噪声项
=
∣
X
k
1
,
3
∣
2
∣
X
k
3
,
3
∣
2
∣
H
k
1
∣
2
e
j
2
π
(
k
3
−
k
1
)
N
τ
+
W
3
\begin{aligned} (Y_{k_1,3}X_{k_1,3}^*)(Y_{k_3,3}X_{k_3,3}^*)^* &= (|X_{k_1,3}|^2 H_{k_1} e^{-j \frac{2\pi k_1}{N} \tau}+W_{k_1,3})(|X_{k_3,3}|^2 H_{k_3} e^{-j \frac{2\pi k_3}{N} \tau}+W_{k_3,3})^* \\&=|X_{k_1,3}|^2|X_{k_3,3}|^2H_{k_1}H_{k_3}^*e^{-j \frac{2\pi k_1}{N} \tau}e^{j \frac{2\pi k_3}{N} \tau} +W_{3} \\&假设信道平坦,我们可以得到H_{k_1}=H_{k_3},此处W_{3}指代所有的噪声项 \\&=|X_{k_1,3}|^2|X_{k_3,3}|^2|H_{k_1}|^2e^{j \frac{2\pi (k_3 – k_1)}{N} \tau}+W_{3} \end{aligned}
(
Y
k
1
,
3
X
k
1
,
3
∗
)
(
Y
k
3
,
3
X
k
3
,
3
∗
)
∗
=
(
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
N
2
π
k
1
τ
+
W
k
1
,
3
)
(
∣
X
k
3
,
3
∣
2
H
k
3
e
−
j
N
2
π
k
3
τ
+
W
k
3
,
3
)
∗
=
∣
X
k
1
,
3
∣
2
∣
X
k
3
,
3
∣
2
H
k
1
H
k
3
∗
e
−
j
N
2
π
k
1
τ
e
j
N
2
π
k
3
τ
+
W
3
假设信道平坦,我们可以得到
H
k
1
=
H
k
3
,此处
W
3
指代所有的噪声项
=
∣
X
k
1
,
3
∣
2
∣
X
k
3
,
3
∣
2
∣
H
k
1
∣
2
e
j
N
2
π
(
k
3
−
k
1
)
τ
+
W
3
对99*2组导频进行累加,因为噪声W是白噪声,累加之后趋于0,可以忽略。
累加之后再开平方可得
N
p
2
∣
X
k
1
,
3
∣
∣
X
k
3
,
3
∣
∣
H
k
1
∣
e
j
2
π
(
k
3
−
k
1
)
2
N
τ
=
N
p
2
∣
X
k
1
,
3
∣
∣
X
k
3
,
3
∣
∣
H
k
1
∣
e
j
2
π
(
k
2
−
k
1
)
N
τ
\frac{N_p}{2}|X_{k_1,3}||X_{k_3,3}||H_{k_1}|e^{j \frac{2\pi (k_3 – k_1)}{2N} \tau}=\frac{N_p}{2}|X_{k_1,3}||X_{k_3,3}||H_{k_1}|e^{j \frac{2\pi (k_2 – k_1)}{N} \tau}
2
N
p
∣
X
k
1
,
3
∣∣
X
k
3
,
3
∣∣
H
k
1
∣
e
j
2
N
2
π
(
k
3
−
k
1
)
τ
=
2
N
p
∣
X
k
1
,
3
∣∣
X
k
3
,
3
∣∣
H
k
1
∣
e
j
N
2
π
(
k
2
−
k
1
)
τ
对于该结果,我们求其角度值可得
θ
=
2
π
(
k
2
−
k
1
)
N
τ
\theta = \frac{2\pi (k_2 – k_1)}{N}\tau
θ
=
N
2
π
(
k
2
−
k
1
)
τ
根据帧结构我们可知
k
2
−
k
1
=
2
k_2 – k_1=2
k
2
−
k
1
=
2
,
N
=
1024
N=1024
N
=
1024
,带入即可求得时延
τ
=
θ
N
2
π
(
k
2
−
k
1
)
\tau=\frac{\theta N}{2 \pi (k_2 – k_1)}
τ
=
2
π
(
k
2
−
k
1
)
θN
注意,由于
θ
\theta
θ
的范围在
−
π
,
π
-\pi,\pi
−
π
,
π
之间,因此,可以估算出的时延
τ
\tau
τ
是有一个范围的。
频偏估计(频率跟踪)
在已经求得时延
τ
\tau
τ
的基础上,我们进一步求频偏
f
d
f_d
f
d
接下来我们令:
(
Y
k
2
,
13
X
k
2
,
13
∗
)
(
Y
k
1
,
3
X
k
1
,
3
∗
)
∗
=
(
∣
X
k
2
,
13
∣
2
H
k
2
e
−
j
2
π
k
2
N
τ
e
j
2
π
f
d
△
t
+
W
k
2
,
13
)
(
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
2
π
k
1
N
τ
+
W
k
1
,
3
)
∗
=
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
H
k
2
H
k
1
∗
e
−
j
2
π
k
2
N
τ
e
j
2
π
k
1
N
τ
e
j
2
π
f
d
△
t
+
W
假设信道平坦,我们可以得到
H
k
1
=
H
k
2
,此处
W
指代所有的噪声项
=
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
e
j
2
π
(
k
1
−
k
2
)
N
τ
e
j
2
π
f
d
△
t
+
W
\begin{aligned} (Y_{k_2,13}X_{k_2,13}^*)(Y_{k_1,3}X_{k_1,3}^*)^* &= (|X_{k_2,13}|^2 H_{k_2} e^{-j \frac{2\pi k_2}{N} \tau}e^{j 2\pi f_d \bigtriangleup t}+W_{k_2,13})(|X_{k_1,3}|^2 H_{k_1} e^{-j \frac{2\pi k_1}{N} \tau}+W_{k_1,3})^* \\&=|X_{k_2,13}|^2|X_{k_1,3}|^2H_{k_2}H_{k_1}^*e^{-j \frac{2\pi k_2}{N} \tau}e^{j \frac{2\pi k_1}{N} \tau} e^{j 2\pi f_d \bigtriangleup t} +W \\&假设信道平坦,我们可以得到H_{k_1}=H_{k_2},此处W指代所有的噪声项 \\&=|X_{k_2,13}|^2|X_{k_1,3}|^2|H_{k_2}|^2e^{j \frac{2\pi (k_1-k_2) }{N} \tau} e^{j 2\pi f_d \bigtriangleup t} +W \end{aligned}
(
Y
k
2
,
13
X
k
2
,
13
∗
)
(
Y
k
1
,
3
X
k
1
,
3
∗
)
∗
=
(
∣
X
k
2
,
13
∣
2
H
k
2
e
−
j
N
2
π
k
2
τ
e
j
2
π
f
d
△
t
+
W
k
2
,
13
)
(
∣
X
k
1
,
3
∣
2
H
k
1
e
−
j
N
2
π
k
1
τ
+
W
k
1
,
3
)
∗
=
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
H
k
2
H
k
1
∗
e
−
j
N
2
π
k
2
τ
e
j
N
2
π
k
1
τ
e
j
2
π
f
d
△
t
+
W
假设信道平坦,我们可以得到
H
k
1
=
H
k
2
,此处
W
指代所有的噪声项
=
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
e
j
N
2
π
(
k
1
−
k
2
)
τ
e
j
2
π
f
d
△
t
+
W
累加可得
N
p
2
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
e
j
2
π
(
k
1
−
k
2
)
N
τ
e
j
2
π
f
d
△
t
\frac{N_p}{2}|X_{k_2,13}|^2|X_{k_1,3}|^2|H_{k_2}|^2e^{j \frac{2\pi (k_1-k_2) }{N} \tau} e^{j 2\pi f_d \bigtriangleup t}
2
N
p
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
e
j
N
2
π
(
k
1
−
k
2
)
τ
e
j
2
π
f
d
△
t
我们在求时延
τ
\tau
τ
的时候就已经计算得到
N
p
2
∣
X
k
1
,
3
∣
∣
X
k
3
,
3
∣
∣
H
k
1
∣
e
j
2
π
(
k
2
−
k
1
)
N
τ
\frac{N_p}{2}|X_{k_1,3}||X_{k_3,3}||H_{k_1}|e^{j \frac{2\pi (k_2 – k_1)}{N} \tau}
2
N
p
∣
X
k
1
,
3
∣∣
X
k
3
,
3
∣∣
H
k
1
∣
e
j
N
2
π
(
k
2
−
k
1
)
τ
,二者相乘可得
N
p
2
4
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
∣
X
k
1
,
3
∣
∣
X
k
3
,
3
∣
∣
H
k
1
∣
e
j
2
π
(
k
1
−
k
2
+
k
2
−
k
1
)
N
τ
e
j
2
π
f
d
△
t
=
M
e
j
2
π
f
d
△
t
\frac{N_p^2}{4}|X_{k_2,13}|^2|X_{k_1,3}|^2|H_{k_2}|^2|X_{k_1,3}||X_{k_3,3}||H_{k_1}|e^{j \frac{2\pi (k_1-k_2+k_2-k_1) }{N} \tau} e^{j 2\pi f_d \bigtriangleup t} = M e^{j 2\pi f_d \bigtriangleup t}
4
N
p
2
∣
X
k
2
,
13
∣
2
∣
X
k
1
,
3
∣
2
∣
H
k
2
∣
2
∣
X
k
1
,
3
∣∣
X
k
3
,
3
∣∣
H
k
1
∣
e
j
N
2
π
(
k
1
−
k
2
+
k
2
−
k
1
)
τ
e
j
2
π
f
d
△
t
=
M
e
j
2
π
f
d
△
t
对该结果求角度可得
θ
‘
=
2
π
f
d
△
t
{\theta}^` = 2\pi f_d \bigtriangleup t
θ
‘
=
2
π
f
d
△
t
△
t
\bigtriangleup t
△
t
为ofdm3和ofdm13的时间间隔,带入即可轻松求得频偏
f
d
=
θ
‘
2
π
△
t
f_d = \frac{
{\theta}^` }{2\pi \bigtriangleup t}
f
d
=
2
π
△
t
θ
‘
注意,由于
θ
‘
{\theta}^`
θ
‘
的范围在
−
π
,
π
-\pi,\pi
−
π
,
π
之间,因此,可以估算出的频偏
f
d
f_d
f
d
是有一个范围的。