上一节图里面描绘的曲线

仅仅是针对阶跃响应为
的系统来说的。但是这给我们提供了一个很好的例子:许多系统拥有成对的主极点,我们可以通过类似上图的关系来估计系统的阶跃响应。这个方法尽管只是一个估算,但却能在避免拉普拉斯转化的情况下提供一个对超调或者其他的性能参数的简单估算。举个例子,对于具有以下闭环转换方程的三阶系统:
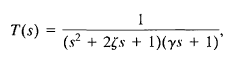
s域极点图如下:

该三阶系统通过归一化使得ωn = 1。我们通过实验发现,当上述三阶系统满足
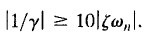
时,其性能(如超调比,稳定时间)可以用二阶系统的性能曲线来表示。换句话说,只要满足上述条件,三阶系统的响应可以用其主极点部分构成的二阶系统的响应来估计。
我们用计算机模拟,看看情况是否如我们说的那样。
Matlab仿真代码(实时编辑器环境下仿真)
%首先看看不满足近似条件的情况
syms gamma zeta;
gamma = 2.25;
zeta = 0.45;
%对于三阶系统
sys1_3 = tf(1,[gamma,2*gamma*zeta+1,gamma+2*zeta,1])
%求阶跃响应
step(sys1_3)
stepinfo(sys1_3)
%此时对于两阶系统
sys1_2 = tf(1,[1,2*zeta,1])
%求阶跃响应
step(sys1_2)
stepinfo(sys1_2)
%再看看满足近似条件的情况
gamma = 0.2;
zeta = 0.45;
%对于三阶系统
sys2_3 = tf(1,[gamma,2*gamma*zeta+1,gamma+2*zeta,1])
%求阶跃响应
step(sys2_3)
stepinfo(sys2_3)
%对于二阶系统
sys2_2 = tf(1,[1,2*zeta,1])
%求阶跃响应
step(sys2_2)
stepinfo(sys2_2)
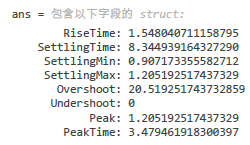
输出结果:
- 当不满足近似条件
三阶系统的时域响应


三阶系统里面的同极点的二阶系统的时域响应

2. 满足近似条件
三阶系统

二阶系统

我们发现在不满足近似条件的情况下,一个三阶系统的响应是不能用二阶系统来近似的。而满足近似条件的时候,三阶系统和二阶系统的响应非常接近。
但是,上述分析仅仅针对
不具有有限零点的转换方程
有效。如果转换方程具有一个有限零点,且零点靠近主极点,那么该零点将对该系统的响应带来很大的影响。接下来我们通过仿真结果看看零点给系统带来的影响。(这个仿真我就不做了,懒,直接截图课本)
我们来看下面这个系统:
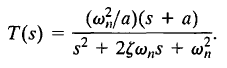
图5.13(a)展示了当满足: ζ<=1
且一个系统在受到阶跃输入时,超调比与α/ζωn
的关系。

图5.13(b)则展示了当ζ = 0.45时,系统的瞬时响应与不同的α/ζωn 的关系

我们发现:对于不同的ζ,系统的超调与零点位置有着一定的关系;而对于一个固定的ζ,系统的瞬时响应与零点位置也有着一定的关系。可见零点对系统也有着影响。(这里为什么用这两张图来说明,里面的逻辑关系我还不是很清楚)
结论就是:系统的时域响应与闭环转换方程的S域极点的位置的关系在我们确定系统的性能时是十分有用的。
我们用下面的例子说明如何通过改变极点位置来有目的性地影响系统的响应:
例5.1 参数选择
一个单环反馈系统如下图所示:
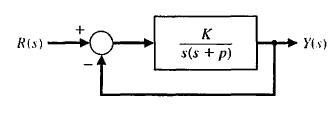
我们通过选择 K 和 p 的值来使得系统的性能满足我们下面几个要求:
- 瞬时响应应该尽可能地快速
- 系统超调不超过5%
- 2%稳定时间小于4s
一个有用的结论:
对于一个具有4.3%超调的系统,它的阻尼比大概为0.707
。
有了这个结论之后,为了满足第二个要求,我们可以令系统的阻尼比>=0.707。
阻尼比在s域的表达如下图所示(信号与系统s域分析方面知识):

同时为了满足第三个要求,需要:
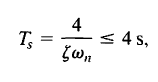
因此ζωn>=1。根据以上两个条件,在图像里面极点的可选择区域为阴影部分。为了满足系统尽可能快速响应,我们取两个临界点为我们的极点(
思考为什么
):

此时超调为4.3%,稳定时间为4s。因此:

我们的系统方程为:

K和p的取值为:

对于系统分析工程师和设计师来说,透彻的理解极点位置对系统瞬时响应的影响是必备技能。下个例子我看考虑复杂一点的情况。
例5.2 T(s)的主极点
考虑具有如下闭环转换方程的系统
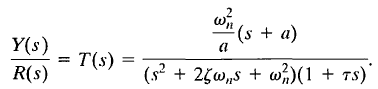
零点和极点都会影响这个系统的瞬时响应。如果α>>ζωn 且 γ<<1/ζωn, 那么零极点对系统的阶跃响应将会很小。
假设我们的系统为
注意到T(0)=1,并且该系统对于阶跃输入的稳态误差为0。此时ζωn = 3,τ = 0.16 以及α = 2.5,零极点位置如下图所示:

我们忽略实轴上的极点,此时系统变为:
通过仿真,该系统的超调为55%,稳定时间为1.33s。而对于原三阶系统,超调为38%,稳定时间为1.6s。因此,T(s)第三个极点带来的影响是减少了超调,增加了稳定时间(因此实极点不能够忽略)
阻尼比在闭环系统性能里面扮演了根本的角色,放眼望去稳定时间,超调量,峰值时间以及rise time,阻尼比是决定系统整体性能的关键参数。
实际上,对于二阶系统,阻尼比是影响系统阶跃响应超调的唯一参数,因此未知二阶系统的阻尼比可以通过阶跃响应来估算。
一个二阶系统的时域表达式为:

其中:

因此,sin项的频率为

因此每秒的circle数为ω/2Π。
指数项的时间常量为τ = 1/(ζωn),因此指数部分衰减到1/e倍时sin走过的circle数为

假设衰减了n个时间常量,那么总的circle数
对于二阶系统,响应停留在2%终值范围内所花的时间为4τ,因此n=4:

因此对于一个实际的二阶系统,我们输入阶跃信号,观察输出,并且数出响应到达2%稳定时经过的circle数b,阻尼比则可以用5.5/b得到。
另一个估算ζ的方法则是计算输出的超调,再根据超调和阻尼比的关系表得到ζ。