PCA、协方差矩阵以及在点云处理中的应用
目的
考虑一个问题:一组数据
X
P
×
N
X_{P\times N}
X
P
×
N
(数据维度为P,样本点数目为N),我们想对
X
X
X
进行降维,但最大限度的保留其中的信息,该怎么做?
一种直观的想法是这样的,如果数据中存在高度相关的维度,那我们只保留其中的一个维度就可以了。对于普通的数据,各维度的相关性比较复杂,判断要保留哪些维度是一件比较困难的事情。但是有一种理想的情况,数据的协方差矩阵
X
X
T
XX^T
X
X
T
是一个对角矩阵,各个维度之间都不相关,那么我们只需要保留方差比较大的维度就可以了。
所以,如果我们能有一种方法对数据进行处理,使得其协方差矩阵为对角矩阵,即将
[
c
o
n
v
(
X
,
X
)
c
o
n
v
(
X
,
Y
)
c
o
n
v
(
Y
,
X
)
c
o
n
v
(
Y
,
Y
)
]
\begin{bmatrix} conv(X,X) & conv(X,Y) \\ conv(Y,X) & conv(Y,Y) \end{bmatrix}
[
c
o
n
v
(
X
,
X
)
c
o
n
v
(
Y
,
X
)
c
o
n
v
(
X
,
Y
)
c
o
n
v
(
Y
,
Y
)
]
化为:
[
c
o
n
v
(
X
,
X
)
0
0
c
o
n
v
(
Y
,
Y
)
]
\begin{bmatrix} conv(X,X) & 0 \\ 0 & conv(Y,Y) \end{bmatrix}
[
c
o
n
v
(
X
,
X
)
0
0
c
o
n
v
(
Y
,
Y
)
]
那么问题就解决了。幸运的是,由于协方差矩阵的良好性质(对称性),这个思路是完全可行的。我们可以对原始数据进行”变基“操作(即换个坐标系,或者简单的理解为旋转坐标系),使得这组数据在我们的新基下,其协方差矩阵为对角矩阵。在方差较大的维度上,数据是较为分散的,保留了原始数据的大部分信息。而在方差较小的维度上,数据几乎没有波动,这些维度我们完全可以丢掉。因此可以起到降维的效果。(当我们的新基相对与旧基只是一个旋转变换的时候,各样本点到样本均值之间的距离是不变的。这个距离的均值等于协方差矩阵的迹,也即各个维度内部的方差之和。因此一些维度方差最大,另一些维度必然方差最小)。
以上就是PCA算法的基本思想。
PCA推导
特征值分解
定义:
方阵
A
n
×
n
A_{n\times n}
A
n
×
n
,且
A
A
A
有
N
N
N
个线性无关的特征向量
q
i
(
i
=
1
,
…
,
N
)
q_{i}(i=1, \ldots, N)
q
i
(
i
=
1
,
…
,
N
)
,则
A
A
A
可以被分解为
A
=
Q
Λ
Q
−
1
\mathbf{A}=\mathbf{Q} \mathbf{\Lambda} \mathbf{Q}^{-1}
A
=
Q
Λ
Q
−
1
其中
Q
\mathrm{Q}
Q
是
N
×
N
N \times N
N
×
N
方阵, 且其第
i
i
i
列为
A
\mathrm{A}
A
的特征向量 。
Λ
\Lambda
Λ
是对角矩阵, 其对角线上的元素为对应的特征值,也即
Λ
i
i
=
λ
i
\Lambda_{i i}=\lambda_{i}
Λ
i
i
=
λ
i
。
直观理解:
矩阵乘法可以表征一个线性变换(旋转和拉伸的组合,注意方阵没有降维操作),特征值分解可以使得这个过程更加清晰。首先需要说明的是,
A
A
A
代表的线性变换,在以其特征向量为基的空间中,只是沿着坐标轴的拉伸而已(两者是同一个线性变换在不同的坐标系下的表达,也即
A
A
A
与
Λ
\mathbf{\Lambda}
Λ
是相似矩阵)。所以假设我们要对向量
b
b
b
进行线性变换(求
A
b
Ab
A
b
),可以分解为以下三步:
-
对
bb
b
进行“变基”,把
bb
b
变换到以
AA
A
的特征向量
qi
q_i
q
i
为基底的坐标系下,得到
bq
b_q
b
q
(左乘
Q−
1
Q^{-1}
Q
−
1
) -
对
bq
b_q
b
q
沿着坐标轴拉伸 (左乘
Λ\Lambda
Λ
) -
将
bq
b_q
b
q
进行”反变基”,变回原坐标系下(左乘
QQ
Q
)
一些细节:
-
记录下实对称矩阵的优良性质:
- 实对称矩阵的特征值都是实数。这时矩阵的几何意义可以认为是沿着特征向量的拉伸和缩放
- 实对称矩阵不同的特征值对应的特征向量是正交的,普通矩阵只能保证不同的特征值对应的特征向量线性无关 (要求正交的话,可以使用正交化方法)
-
实对称矩阵的
kk
k
重特征值所对应的线性无关的特征向量恰有
kk
k
个 -
实对称矩阵必可正交相似对角化,即必存在正交矩阵
Q\mathbf{Q}
Q
,使得
Q−
1
A
Q
\mathbf{Q}^{-1} \mathbf{A} \mathbf{Q}
Q
−
1
A
Q
为对角矩阵, 其中
Q\mathbf{Q}
Q
的列向量为
A\mathbf{A}
A
的正交特征向量。(首先因为n阶实对称矩阵有n个线性无关的特征向量,因此是必可对角化的;其次,其
kk
k
重特征值所对应的特征向量虽然只能保证线性无关,但是我们可以对其进行施密特正交化(施密特正交化求出来的向量都是这
kk
k
个线性无关特征向量的线性组合,因此仍然是原矩阵的特征向量))
-
非对称矩阵和复矩阵的特征值可能为复数。这时矩阵的几何意义是旋转,路径不一定是圆,也可以是螺线。特征值可以理解为一个和旋转角度有关的量。
了解了以上内容,我们一开始提出的问题的解决方案就很清楚了。协方差矩阵是一个实对称矩阵,而实对称矩阵必可正交相似对角化,也就是说我们一定可以找到一组新的正交基,把实对称矩阵化为对角矩阵。
对协方差矩阵进行正交相似对角化:
Λ
=
P
−
1
X
X
T
P
=
P
T
X
X
T
P
\Lambda=P^{-1}X X^{T} P=P^{T}X X^{T} P
Λ
=
P
−
1
X
X
T
P
=
P
T
X
X
T
P
我们所寻找的基变换就是
Y
=
P
T
X
Y=P^TX
Y
=
P
T
X
,
P
P
P
的列向量为
X
X
T
XX^T
X
X
T
的正交特征向量。
以上过程,需要求出协方差矩阵,再做特征值分解,当数据量大、数据维度高的时候,这种方法的计算代价很高,我们可以利用奇异值分解做优化。
(PCA另有两种推导思路,最小投影距离及最大投影方差,这里不再赘述,可参考
PCA推导
)
奇异值分解
定义:
对于任意给定的
A
∈
R
m
×
n
A\in R^{m\times n}
A
∈
R
m
×
n
,都存在唯一的正交矩阵
U
∈
R
m
×
m
U\in R^{m\times m}
U
∈
R
m
×
m
,
V
∈
R
n
×
n
V\in R^{n\times n}
V
∈
R
n
×
n
和
S
∈
R
m
×
n
S\in R^{m\times n}
S
∈
R
m
×
n
使得
A
=
U
S
V
T
A=USV^T
A
=
U
S
V
T
其中:
U
U
U
的列向量为
A
A
T
AA^T
A
A
T
的特征向量,称为
A
A
A
的左奇异向量
V
V
V
的列向量为
A
T
A
A^TA
A
T
A
的特征向量,称为
A
A
A
的右奇异向量
S
=
[
S
1
0
0
0
]
S=\begin{bmatrix} S_1 & 0 \\ 0 & 0 \end{bmatrix}\\
S
=
[
S
1
0
0
0
]
S
1
=
d
i
a
g
(
σ
1
,
.
.
.
σ
r
)
,
r
=
r
(
A
)
,
σ
1
⩾
.
.
.
⩾
σ
r
>
0
,
σ
i
为
矩
阵
奇
异
值
S_1=diag(\sigma_1,…\sigma_r),r=r(A),\sigma_1\geqslant…\geqslant\sigma_r>0,\sigma_i为矩阵奇异值
S
1
=
d
i
a
g
(
σ
1
,
.
.
.
σ
r
)
,
r
=
r
(
A
)
,
σ
1
⩾
.
.
.
⩾
σ
r
>
0
,
σ
i
为
矩
阵
奇
异
值
直观理解:
和特征值分解类似,奇异值分解是为了让我们将矩阵所表征的线性变换看得更清晰。为了达到这个目的,我们需要找到新基,使得在这些基下,矩阵所表征的线性变换是一个非常简单的形式。在特征值分解中,我们找到的新基就是特征向量。 对于非方阵和无法进行特征值分解的方阵,我们找到的新基是”奇异向量“。奇异向量满足两个性质:
- 变换前是正交的,变换后仍然正交
-
在以奇异向量为基的空间中,
AA
A
所代表的线性变换是沿着坐标轴的拉伸,再加一个旋转
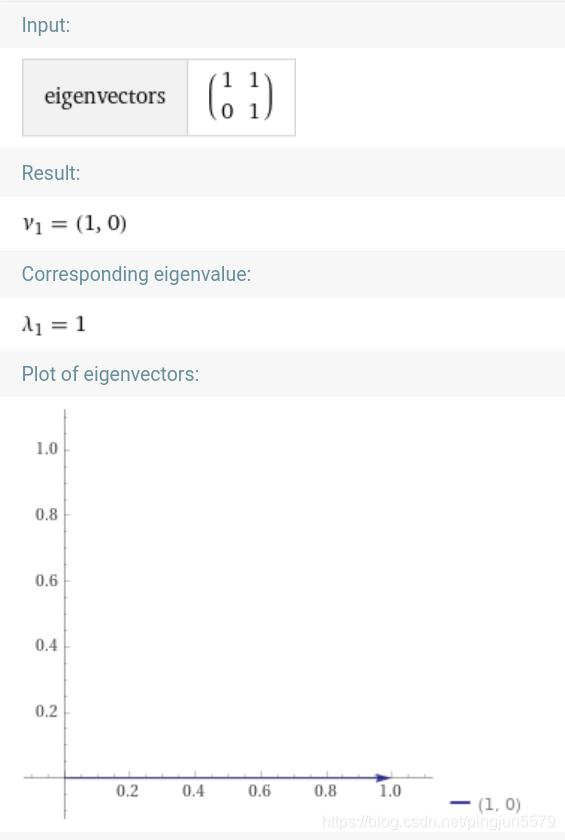
举例而言,对于矩阵:
A
=
[
1
1
0
1
]
A=\begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}\\
A
=
[
1
0
1
1
]
这是一个剪切变换,只有一个特征向量
(
1
,
0
)
T
(1,0)^T
(
1
,
0
)
T
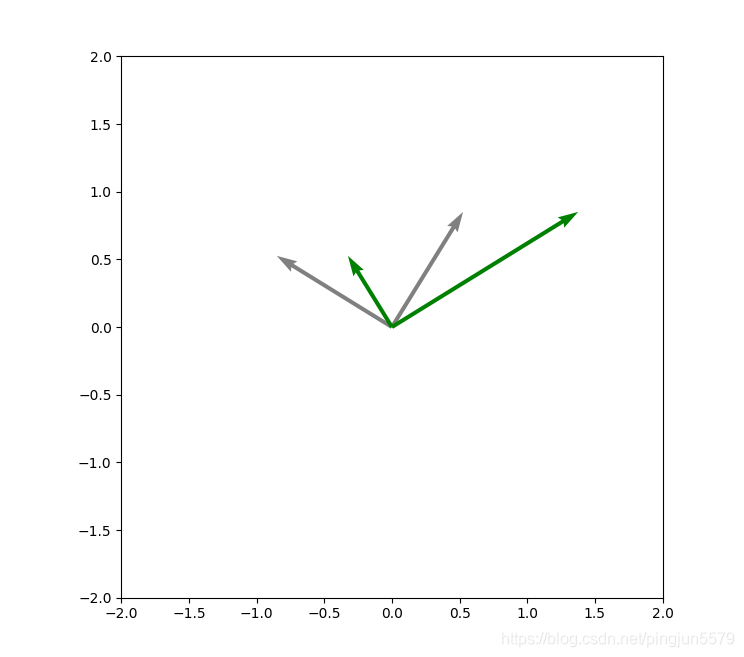
,无法进行特征值分解。如下图所示。
但是却可以进行奇异值分解(灰色是右奇异向量,绿色是右奇异向量左乘
A
A
A
之后的向量,即经过剪切变换后的向量,可以看到两个向量仍然是正交的;绿色向量较灰色向量的伸缩比例就是奇异值;经过单位化后,就是左奇异向量):
奇异值分解,实际上是将一个线性变换
A
b
Ab
A
b
分为了以下三个步骤:
-
对
bb
b
进行“变基”,把
bb
b
变换到以
AA
A
的右奇异向量
vi
v_i
v
i
为基底的坐标系下,得到
bv
b_v
b
v
(左乘
VT
V^T
V
T
,可以理解为坐标轴的旋转) -
对
bv
b_v
b
v
沿着坐标轴拉伸 (左乘
SS
S
) -
将
bv
b_v
b
v
再次进行”变基”,变到以
UU
U
的行向量为基的坐标系下(左乘
UU
U
,坐标轴再次旋转)
图示如下:
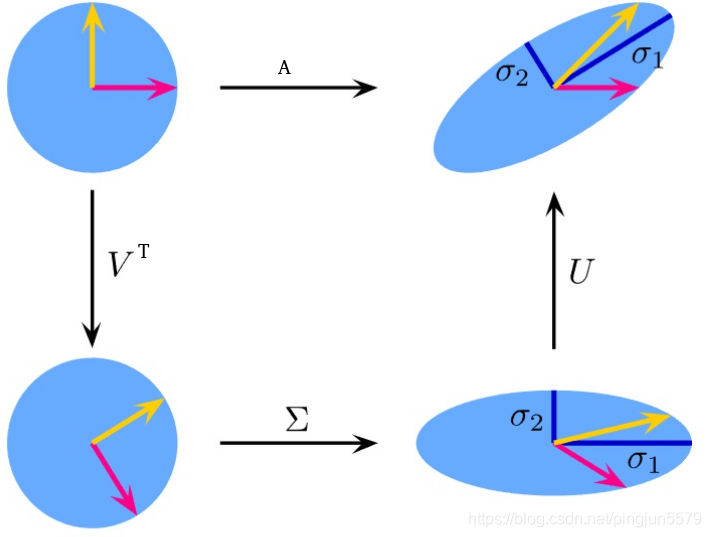
(线性变换
A
A
A
将单位圆变成了椭圆,
A
A
A
的奇异值即是该椭圆的长轴与短轴)
奇异值分解同特征值分解的关系
-
AA
T
AA^T
A
A
T
的特征值等于
AA
A
的对应奇异值的平方 -
UU
U
的列向量为
AA
T
AA^T
A
A
T
的特征向量,
VV
V
的列向量为
AT
A
A^TA
A
T
A
的特征向量
在上节内容中,为了对角化数据
X
X
X
协方差矩阵,我们所寻找的基变换是
Y
=
P
T
X
Y=P^TX
Y
=
P
T
X
,
P
P
P
的列向量为
X
X
T
XX^T
X
X
T
的正交特征向量。有了奇异值分解,我们无需再对解协方差矩阵做特征值分解,而只需要对
X
X
X
做奇异值分解就可以了,因为左奇异向量就是
X
X
T
XX^T
X
X
T
的正交特征向量。
协方差矩阵的几何意义
有了以上的讨论,我们再回过头来看看协方差矩阵的几何意义,就比较简单了,总结一下:
-
协方差矩阵的最大特征值对应的特征向量,总是指向方差最大的方向;次最大特征值对应的特征向量,正交于最大特征值对应的特征向量,并指向次最大方差指向的方向
-
协方差矩阵可以让我们了解附加在原始数据上的线性变换的信息。
假设我们有一组原始数据
XX
X
,协方差矩阵为单位阵
II
I
(比如一个协方差矩阵为
II
I
二元正态分布)。我们对
XX
X
做了一个线性变换( 限定这个线性变换只包含旋转和拉伸,即
A=
R
S
A=RS
A
=
R
S
,
RR
R
为旋转矩阵,
SS
S
为拉伸矩阵),得到
AX
AX
A
X
,那么
AX
AX
A
X
的协方差矩阵为
AX
X
T
A
T
=
A
A
T
=
R
S
S
R
T
AXX^TA^T=AA^T=RSSR^T
A
X
X
T
A
T
=
A
A
T
=
R
S
S
R
T
,又从特征值分解的角度
AA
T
=
Q
Λ
Q
−
1
AA^T=\mathbf{Q} \mathbf{\Lambda} \mathbf{Q}^{-1}
A
A
T
=
Q
Λ
Q
−
1
,所以
R=
Q
,
S
S
=
Λ
R=Q,SS=\mathbf{\Lambda}
R
=
Q
,
S
S
=
Λ
.也就是说,
AA
T
AA^T
A
A
T
的特征向量说明了原始数据是如何被旋转的,特征值则说明了原始数据是如何被拉伸的。
点云处理中的应用
PCA方法在点云处理中有很多应用,列以下几种:
-
边缘检测:位于边缘处的点云有什么特点?从线性变换的角度看,就是存在一个维度,点云拉伸的程度很大,另外两个维度则比较小。因此点云协方差矩阵的特征值可以反映一个点是否是边缘点。我们可以计算
λ1
/
(
λ
1
+
λ
2
+
λ
3
)
\lambda_{1}/(\lambda_{1}+\lambda_{2}+\lambda_{3})
λ
1
/
(
λ
1
+
λ
2
+
λ
3
)
,(
λ1
,
λ
2
,
λ
3
\lambda_{1},\lambda_{2},\lambda_{3}
λ
1
,
λ
2
,
λ
3
按照从大到小的顺序排列),超过阈值则认为是边缘点 -
法向量计算:再想象一组呈平面分布的点云,我们想求其法向量,那实际上是找到新的基向量
e1
,
e
2
,
e
3
e_1,e_2,e_3
e
1
,
e
2
,
e
3
,使得点云在
e1
,
e
2
e_1,e_2
e
1
,
e
2
方向上最为分散,而在
e3
e_3
e
3
上最为集中。
e3
e_3
e
3
即是我们要求的法向量。见
法向量计算
-
点云的Oriented Bounding Box(方向包围盒) 的计算,可以使用PCA计算出OBB的主轴。见
OBB计算
- 点云的粗配准,可以使用PCA得到位姿的初始估计。
参考链接
https://blog.csdn.net/P081513083/article/details/104389658
https://www.zhihu.com/question/41120789/answer/481966094
https://blog.csdn.net/linmingan/article/details/80586214
https://www.zhihu.com/question/22237507
https://www.cnblogs.com/bjwu/p/9280492.html