一、Qt工具箱
-
rqt:综合工具
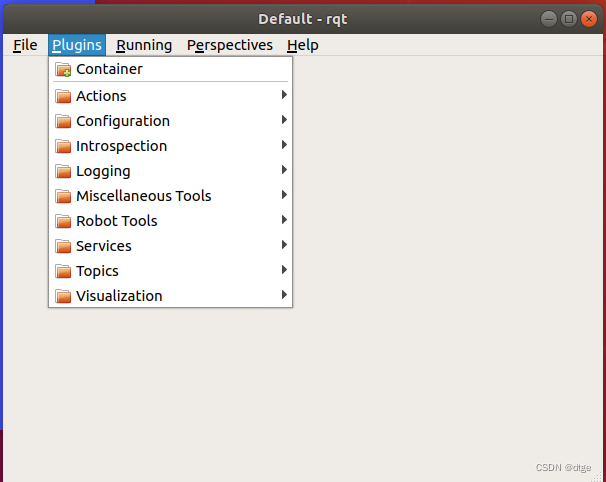
注:在plugins中添加所需功能
-
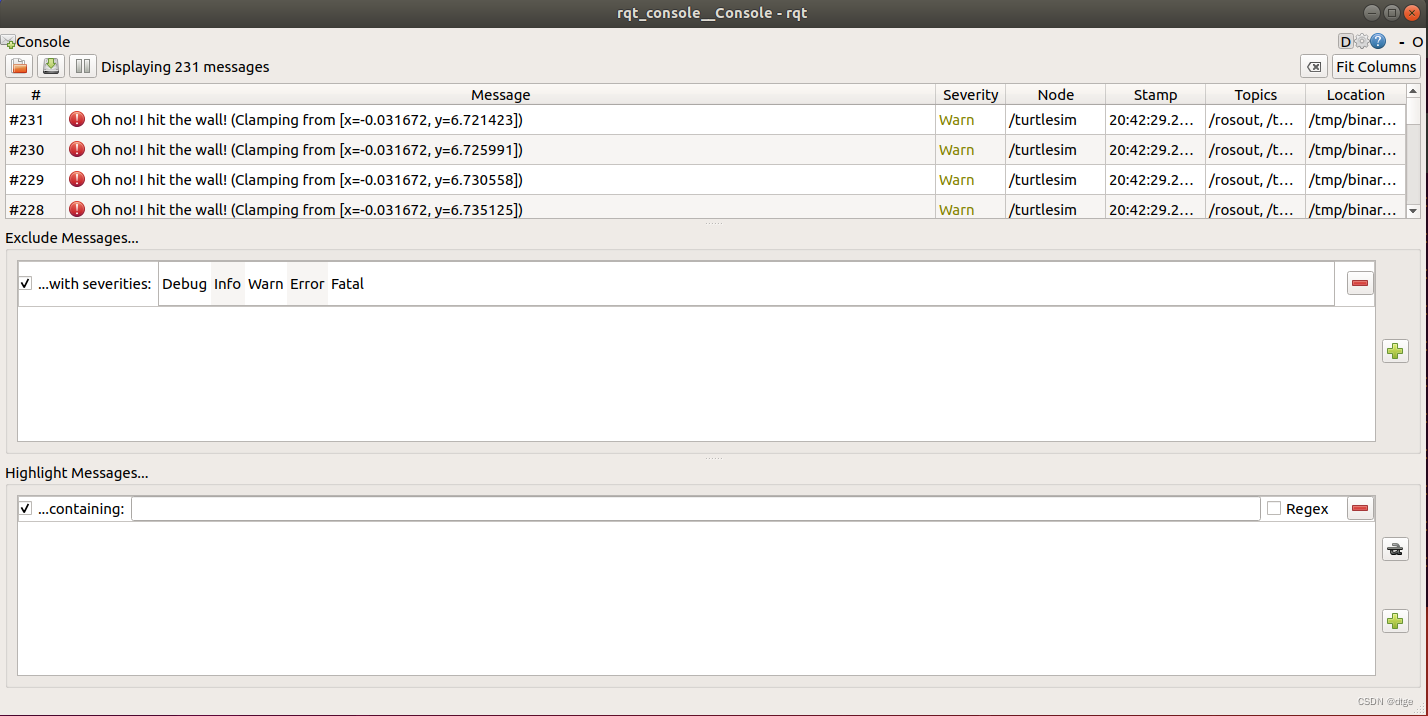
rqt_console:日志输出工具
-
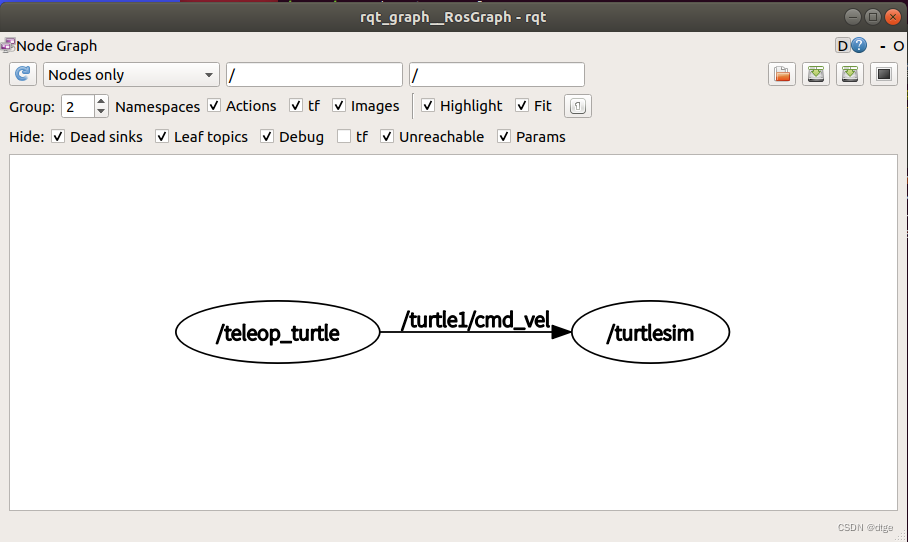
rqt_graph:计算图可视化工具
-
rqt_plot:数据绘图工具

注:1处订阅话题,输入“/”可以自己识别可订阅的话题
2处订阅
3处可以暂停查看数据
-
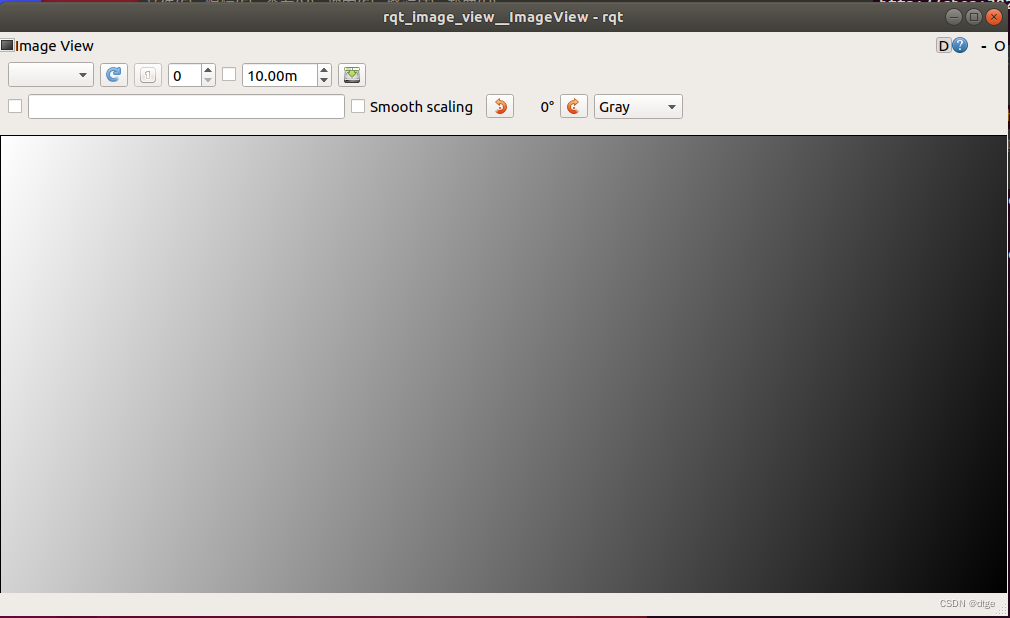
rqt_image_view:图像渲染工具
二、rviz
Rviz是一款
三维可视化工具
,可以很好的兼容基于ROS软件框架的机器人平台
-
在rviz中,可以使用
可扩展标记语言XML
对机器人、周围物体等任何实物进行
尺寸、质量、位 置、材质、关节等属性
的描述,并且在界面中呈现出来 -
rviz还可以通过
图形化的方式
,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等信息 -
viz通过机器人模型参数、机器人发布的传感信息等数据,为用户进行
所有可监测信息的图形化显示
。用户和开发者也可以在rviz的控制界面下,通过按钮、滑动条、数值等方式,控制机器人的行为
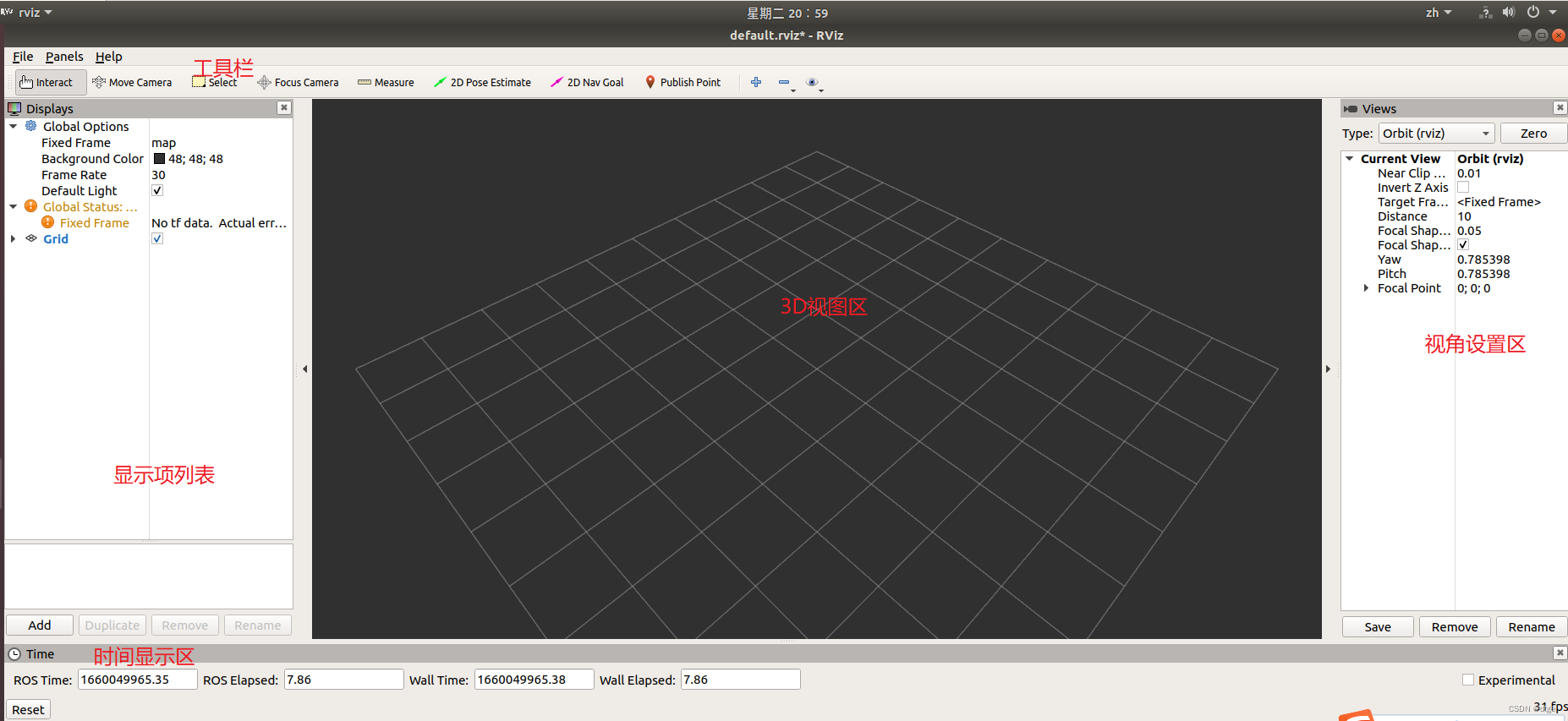
2.1启动rviz
rosrun rviz rviz
2.2rviz界面介绍
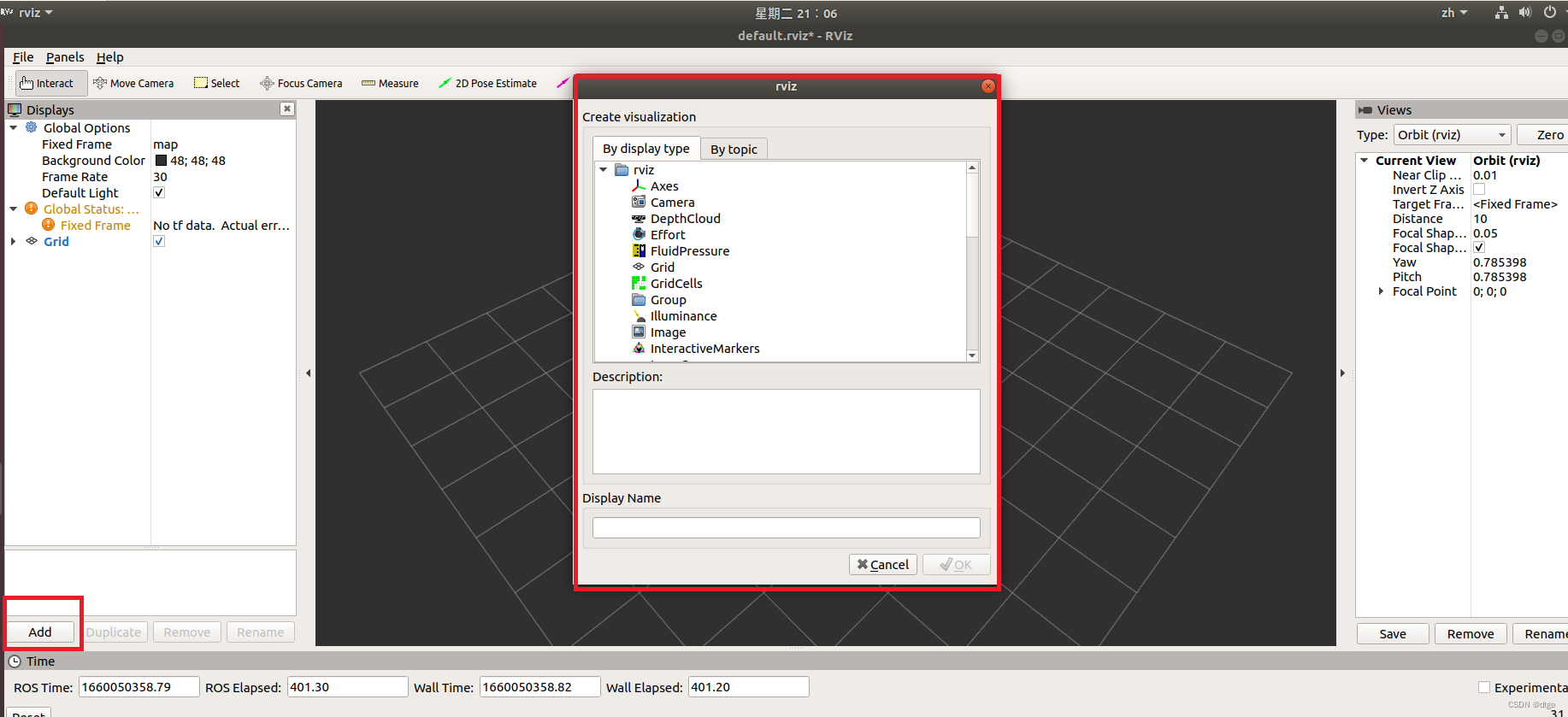
2.3t添加项目
三、Gazebo
3.1简介
- Gazebo可以用于仿真世界模型、传感器模型、动力学模型、运动学模型、机器人模型等待
- 机器人仿真软件是机器人专家工具箱中必备的工具
- 可以加快算法检测,机器人设计,并且用真实场景进行测试
- 可以准确有效的模拟机器人在复杂环境中的运动
- 可以从其他三维建模软件(如SolidWorks)导入机器人模型
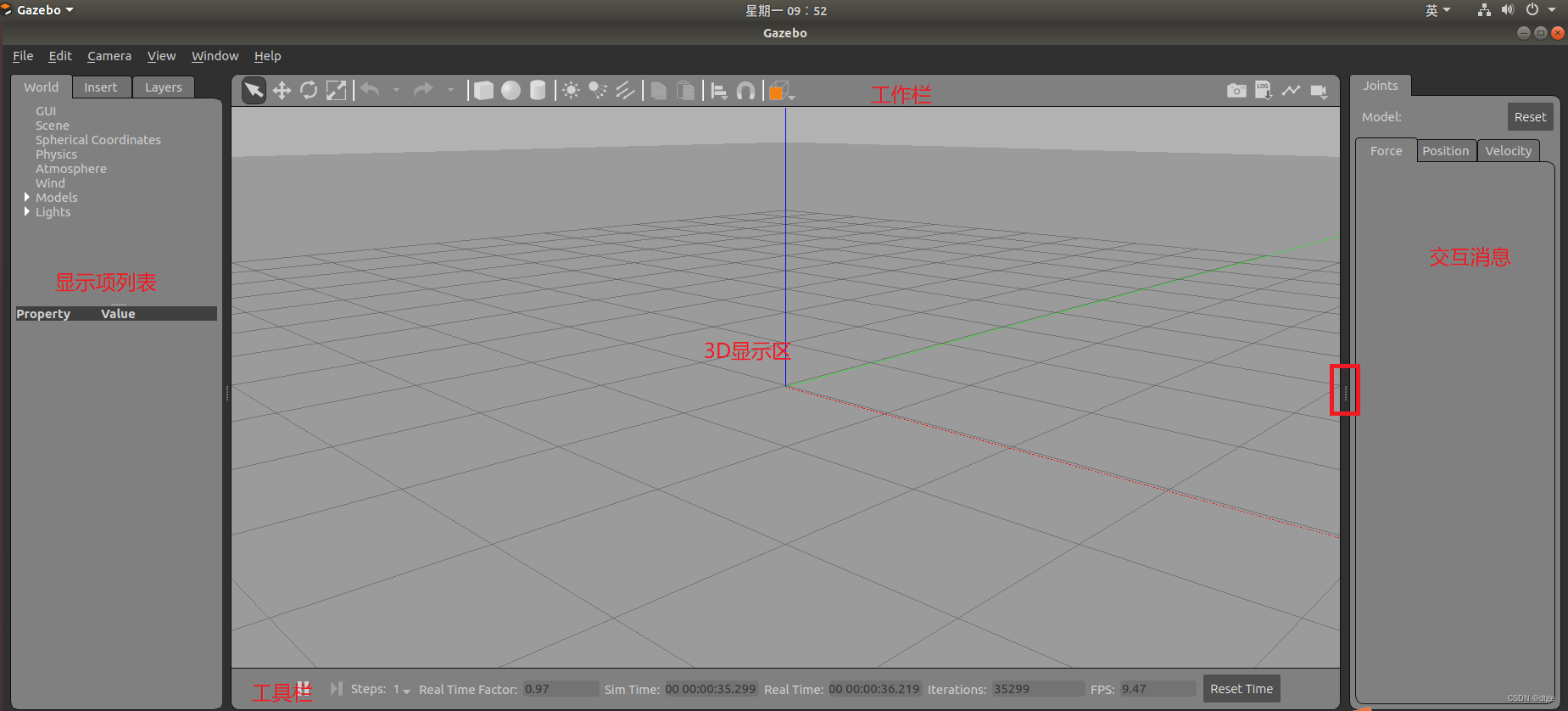
3.2界面与运行
运行:
gazebo如果要打开特定模型:
gazebo worlds/xxx.world
- 第一次执行Gazebo需要下载一些模型,会一直尝试连接网络,可以事先拷贝到model到指定文件夹
- Gazebo默认情况下是隐藏右侧面板,单击并拖动可以将其打开。右侧面板用于与所选模型的移动部件进行交互。
- 工作栏:包含一些常用的与模拟器交互选项(选择、移动、旋转、创建简单形状等等)。
- 工具栏:显示有关模拟的数据,如模拟时间与实际时间的关系。(模拟时间可以比实际时间更快或更慢)
3.3World文件
- world文件包含仿真器中所有的元素(机器人模型、灯光、传感器、静态对象等)
- 文件格式为:SDF
3.4Model文件
- 与world文件相同,model文件也是SDF或者URDF格式,但是只包含一个<model>…</model>
- 为了便于模型的重复使用和简化模型
四、RRBot机械臂案例
RRBot(Revolute-Revolute Manipulator Robot)是一个3连杆2关节机械臂
4.1获取RRBot
cd ~/catkin_ws/src
git clone https://github.com/ros-simulation/gazebo_ros_demos.git
cd .
catkin_make
gazebo_ros_demos.zip
![]()
https://download.csdn.net/download/m0_56451176/86400747
4.2 rviz中加载RRBot模型
roslaunch rrbot_description rrbot_rviz.launch
4.3gazebo中加载
roslaunch rrbot_gazebo rrbot_world.launch
4.4ROS控制gazebo模型
ROS提供ros_control功能包来实现对gazebo的通讯与控制
4.4.1安装ros_control功能
sudo apt-get install ros-melodic-ros-control ros-melodic-ros-controllers
4.4.2运行
roslaunch rrbot_control rrbot_control.launch
4.4.3控制
提高发布话题控制关节运动
rostopic pub /rrbot/joint2_position_controller/command std_msgs/Float64 "data: -0.9"也可提高RQT软件动态控制
roslaunch rrbot_control rrbot_rqt.launch
版权声明:本文为m0_56451176原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。