6,视觉算法
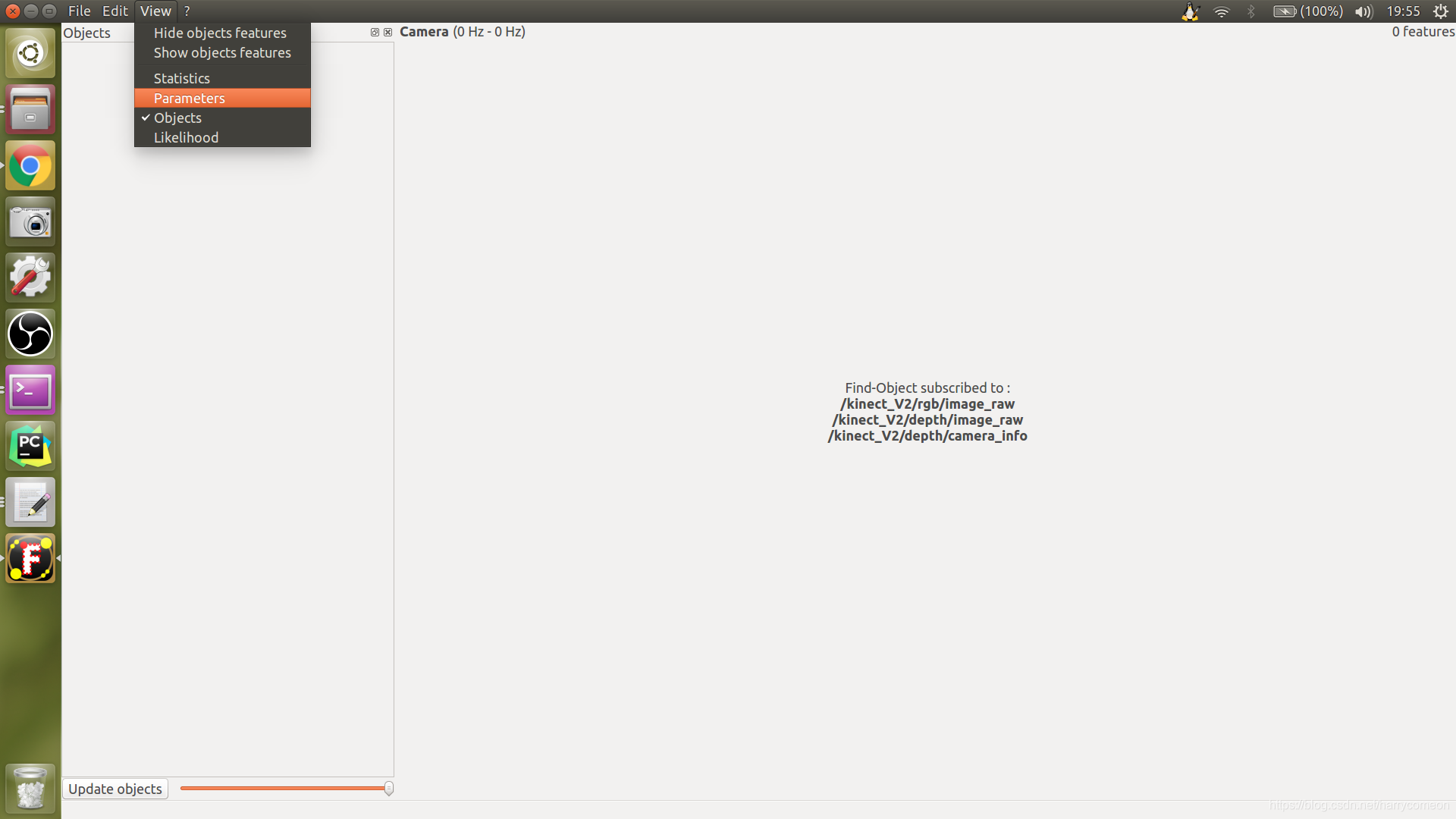
这里我以OpenCv中的SIFT描述子检测目标物体相对于相机的位姿。这里有个开源的包。find_object_2d是ROS平台下一个功能强大的识别物体的功能包。由于对于纯颜色物体具有很少的特征,所以我决定把另外两个物快设置成纯红色,只有一个物快设置成木质色用于目标抓取。
1,首先把之前平台搭建起的Kinect V2图像的RGB和深度图像作为输入进行包的重映射。
find_object_3d_kinect2.launch
<remap from="rgb/image_rect_color" to="/kinect_V2/rgb/image_raw"/>
<remap from="depth_registered/image_raw" to="/kinect_V2/depth/image_raw"/>
<remap from="depth_registered/camera_info" to="/kinect_V2/depth/camera_info"/>
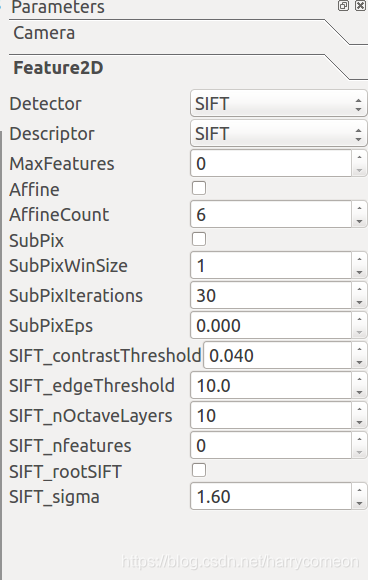
2,然后需要设置SIFT参数
3,截图选定目标物体区域
版权声明:本文为harrycomeon原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。