参考代码:
https://github.com/yhenon/pytorch-retinanet
1.损失函数
1)原理
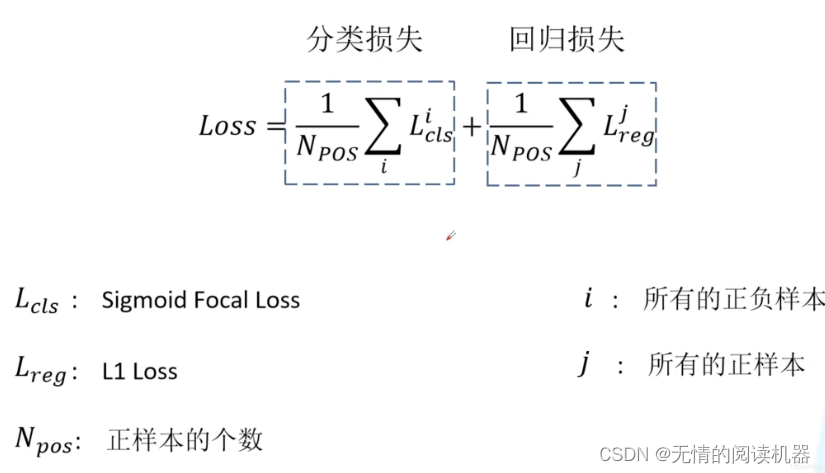
本文一个核心的贡献点就是 focal loss。总损失依然分为两部分,一部分是分类损失,一部分是回归损失。
在讲分类损失之前,我们来回顾一下二分类交叉熵损失 (binary_cross_entropy)。
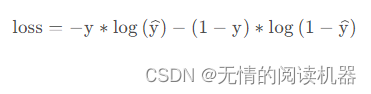
计算代码如下:
import numpy as npy_true = np.array([0., 1., 1., 1., 1., 1., 1., 1., 1., 1.])
y_pred = np.array([0.2, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8])my_loss = - y_true * np.log(y_pred) - (1 - y_true) * np.log(1 - y_pred)
mean_my_loss = np.mean(my_loss)
print("mean_my_loss:",mean_my_loss)
![]()
调用pytorch自带的函数计算
import torch.nn.functional as F
import numpy as np
import torchtorch_pred = torch.tensor(y_pred)
torch_true = torch.tensor(y_true)
bce_loss = F.binary_cross_entropy(torch_pred, torch_true)
print('bce_loss:', bce_loss)

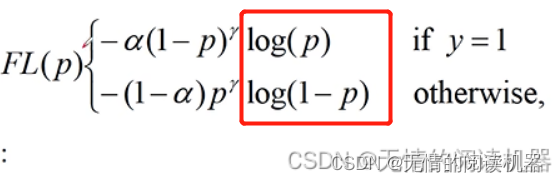
现在回到focal loss,Focal loss的起源是二分类交叉熵。
二分类的交叉熵损失还可以如下表示,其中y∈{1,-1},1代表候选框是正样本,-1代表是负样本:

为了表示方便,可以定义如下公式:

那么问题来了,应用场景如下:
在one-stage 物体检测模型中,一张图中能匹配到目标的候选框(正样本)大概是十几个到几十个,然后没有匹配到的候选框(负样本)10 的四次方到五次方。这些负样本中,大部分都是简单易分的样本,对于训练样本起不到作用,反而淹没了有助于训练的样本。
举个例子,正样本有50个,损失是3,负样本是10000个,损失是0.1
那么50×3 = 150,10000×0.1=1000

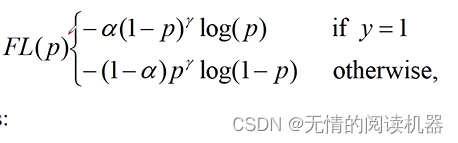
所以,为了平衡交叉熵,采用了系数αt,当是正样本的时候,αt = α,负样本的时候 αt=1-α,α∈[0,1]

αt能平衡正负样本的权重,但是不能区分哪些是困难样本,哪些是容易样本(是否对训练有帮助)。
所以继续引入公式,这样就解决了区分样本容易性的问题:

最后,结合两个公式,形成最终的公式。

展开形式如下
现在来看一下效果,p代表预测候选框是正样本的概率,y是候选框实际上是正样本还是负样本,CE是普通交叉熵计算的损失,FL是focal loss,rate是缩小的比例。可以看出,最后两行难区分样本的rate很小。

2)代码
import numpy as np
import torch
import torch.nn as nn
class FocalLoss(nn.Module):
#def __init__(self):
def forward(self, classifications, regressions, anchors, annotations):
alpha = 0.25
gamma = 2.0
# classifications是预测结果
batch_size = classifications.shape[0]
# 分类loss
classification_losses = []
# 回归loss
regression_losses = []
# anchors的形状是 [1, 每层anchor数量之和 , 4]
anchor = anchors[0, :, :]
anchor_widths = anchor[:, 2] - anchor[:, 0] # x2-x1
anchor_heights = anchor[:, 3] - anchor[:, 1] # y2-y1
anchor_ctr_x = anchor[:, 0] + 0.5 * anchor_widths # 中心点x坐标
anchor_ctr_y = anchor[:, 1] + 0.5 * anchor_heights # 中心点y坐标
for j in range(batch_size):
# classifications的shape [batch,所有anchor的数量,分类数]
classification = classifications[j, :, :]
# classifications的shape [batch,所有anchor的数量,分类数]
regression = regressions[j, :, :]
bbox_annotation = annotations[j, :, :]
bbox_annotation = bbox_annotation[bbox_annotation[:, 4] != -1]
classification = torch.clamp(classification, 1e-4, 1.0 - 1e-4)
if bbox_annotation.shape[0] == 0:
if torch.cuda.is_available():
alpha_factor = torch.ones(classification.shape).cuda() * alpha
alpha_factor = 1. - alpha_factor
focal_weight = classification
focal_weight = alpha_factor * torch.pow(focal_weight, gamma)
bce = -(torch.log(1.0 - classification))
# cls_loss = focal_weight * torch.pow(bce, gamma)
cls_loss = focal_weight * bce
classification_losses.append(cls_loss.sum())
regression_losses.append(torch.tensor(0).float().cuda())
else:
alpha_factor = torch.ones(classification.shape) * alpha
alpha_factor = 1. - alpha_factor
focal_weight = classification
focal_weight = alpha_factor * torch.pow(focal_weight, gamma)
bce = -(torch.log(1.0 - classification))
# cls_loss = focal_weight * torch.pow(bce, gamma)
cls_loss = focal_weight * bce
classification_losses.append(cls_loss.sum())
regression_losses.append(torch.tensor(0).float())
continue
# 每个anchor 与 每个标注的真实框的iou
IoU = calc_iou(anchors[0, :, :], bbox_annotation[:, :4]) # num_anchors x num_annotations
# 每个anchor对应的最大的iou (anchor与grandtruce进行配对)
# 得到了配对的索引和对应的最大值
IoU_max, IoU_argmax = torch.max(IoU, dim=1)
#import pdb
#pdb.set_trace()
# compute the loss for classification
# classification 的shape[anchor总数,分类数]
targets = torch.ones(classification.shape) * -1
if torch.cuda.is_available():
targets = targets.cuda()
# 判断每个元素是否小于0.4 小于就返回true(anchor对应的最大iou<0.4,那就是背景)
targets[torch.lt(IoU_max, 0.4), :] = 0
# 最大iou大于0.5的anchor索引
positive_indices = torch.ge(IoU_max, 0.5)
num_positive_anchors = positive_indices.sum()
assigned_annotations = bbox_annotation[IoU_argmax, :]
targets[positive_indices, :] = 0
targets[positive_indices, assigned_annotations[positive_indices, 4].long()] = 1
if torch.cuda.is_available():
alpha_factor = torch.ones(targets.shape).cuda() * alpha
else:
alpha_factor = torch.ones(targets.shape) * alpha
alpha_factor = torch.where(torch.eq(targets, 1.), alpha_factor, 1. - alpha_factor)
focal_weight = torch.where(torch.eq(targets, 1.), 1. - classification, classification)
focal_weight = alpha_factor * torch.pow(focal_weight, gamma)
bce = -(targets * torch.log(classification) + (1.0 - targets) * torch.log(1.0 - classification))
# cls_loss = focal_weight * torch.pow(bce, gamma)
cls_loss = focal_weight * bce
if torch.cuda.is_available():
cls_loss = torch.where(torch.ne(targets, -1.0), cls_loss, torch.zeros(cls_loss.shape).cuda())
else:
cls_loss = torch.where(torch.ne(targets, -1.0), cls_loss, torch.zeros(cls_loss.shape))
classification_losses.append(cls_loss.sum()/torch.clamp(num_positive_anchors.float(), min=1.0))
# compute the loss for regression
if positive_indices.sum() > 0:
assigned_annotations = assigned_annotations[positive_indices, :]
anchor_widths_pi = anchor_widths[positive_indices]
anchor_heights_pi = anchor_heights[positive_indices]
anchor_ctr_x_pi = anchor_ctr_x[positive_indices]
anchor_ctr_y_pi = anchor_ctr_y[positive_indices]
gt_widths = assigned_annotations[:, 2] - assigned_annotations[:, 0]
gt_heights = assigned_annotations[:, 3] - assigned_annotations[:, 1]
gt_ctr_x = assigned_annotations[:, 0] + 0.5 * gt_widths
gt_ctr_y = assigned_annotations[:, 1] + 0.5 * gt_heights
# clip widths to 1
gt_widths = torch.clamp(gt_widths, min=1)
gt_heights = torch.clamp(gt_heights, min=1)
targets_dx = (gt_ctr_x - anchor_ctr_x_pi) / anchor_widths_pi
targets_dy = (gt_ctr_y - anchor_ctr_y_pi) / anchor_heights_pi
targets_dw = torch.log(gt_widths / anchor_widths_pi)
targets_dh = torch.log(gt_heights / anchor_heights_pi)
targets = torch.stack((targets_dx, targets_dy, targets_dw, targets_dh))
targets = targets.t()
if torch.cuda.is_available():
targets = targets/torch.Tensor([[0.1, 0.1, 0.2, 0.2]]).cuda()
else:
targets = targets/torch.Tensor([[0.1, 0.1, 0.2, 0.2]])
negative_indices = 1 + (~positive_indices)
regression_diff = torch.abs(targets - regression[positive_indices, :])
regression_loss = torch.where(
torch.le(regression_diff, 1.0 / 9.0),
0.5 * 9.0 * torch.pow(regression_diff, 2),
regression_diff - 0.5 / 9.0
)
regression_losses.append(regression_loss.mean())
else:
if torch.cuda.is_available():
regression_losses.append(torch.tensor(0).float().cuda())
else:
regression_losses.append(torch.tensor(0).float())
return torch.stack(classification_losses).mean(dim=0, keepdim=True), torch.stack(regression_losses).mean(dim=0, keepdim=True)
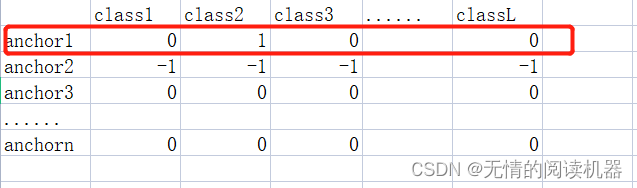
3)分类损失的计算过程
假设一张图片有n个anchor,有m个grandtrue,有L个类别
1.得到anchor和每一个grandtrue的IOU
# 每个anchor 与 每个标注的真实框的iou
IoU = calc_iou(anchors[0, :, :], bbox_annotation[:, :4]) # num_anchors x num_annotations
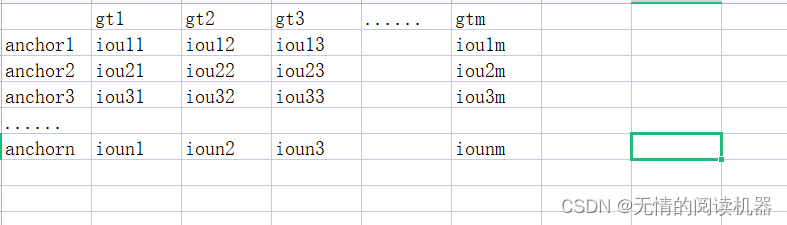
2.得到每个anchor最大的IOU,以及对应的grandtrue
IoU_max, IoU_argmax = torch.max(IoU, dim=1)
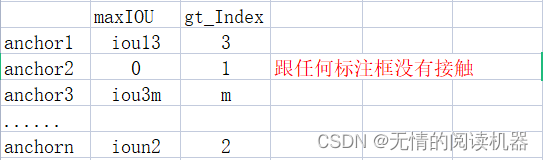
3.初始化一个分类目标结果表,默认值是-1
targets = torch.ones(classification.shape) * -1
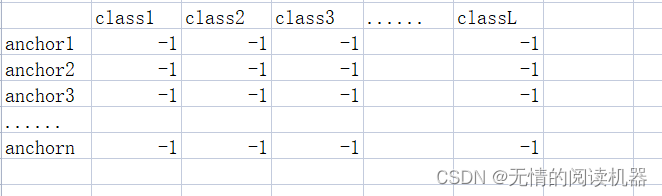
4.如果某个anchor的最大IOU<0.4,那么它对应的分类全为0
targets[torch.lt(IoU_max, 0.4), :] = 0例如:iou3m = 0.3,ioun2 = 0.2
此时,上述分类结果表就更新anchor3,和anchorn的分类结果

5.把每个anchor关联对应的grandtruce信息,其中参数5是预测的类别
# 最大iou大于0.5的anchor索引
positive_indices = torch.ge(IoU_max, 0.5)
num_positive_anchors = positive_indices.sum()
assigned_annotations = bbox_annotation[IoU_argmax, :]
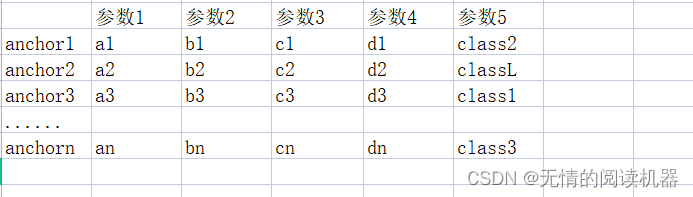
6.如果anchor的最大IOU>0.5,那么根据参数5,修改对应的分类结果表为one-hot形式
targets[positive_indices, :] = 0
targets[positive_indices, assigned_annotations[positive_indices, 4].long()] = 1例如 iou12 = 0.6,参数5 = class2
修改分类结果表
7. 得到损失的权重部分
alpha_factor = torch.where(torch.eq(targets, 1.), alpha_factor, 1. - alpha_factor)
focal_weight = torch.where(torch.eq(targets, 1.), 1. - classification, classification)
focal_weight = alpha_factor * torch.pow(focal_weight, gamma)

α表,将0的地方替换成1-α,1的地方替换成 α

p表 将0的地方原概率,1的地方换成1-p

权重表的元素就是两表对应元素的乘积
8.得到损失的损失部分
bce = -(targets * torch.log(classification) + (1.0 - targets) * torch.log(1.0 - classification))
9.得到初步的损失结果
cls_loss = focal_weight * bce10.将分类结果表原本是-1的地方,对应的损失变成0
例如anchor2最大iou是0.45,介于0.4与0.5之间,我们就不计算他的损失,忽略不计
if torch.cuda.is_available():
cls_loss = torch.where(torch.ne(targets, -1.0), cls_loss, torch.zeros(cls_loss.shape).cuda())
else:
cls_loss = torch.where(torch.ne(targets, -1.0), cls_loss, torch.zeros(cls_loss.shape))11.损失汇总
classification_losses.append(cls_loss.sum()/torch.clamp(num_positive_anchors.float(), min=1.0))
2.网络结构
整体来讲,网络采用了FPN模型
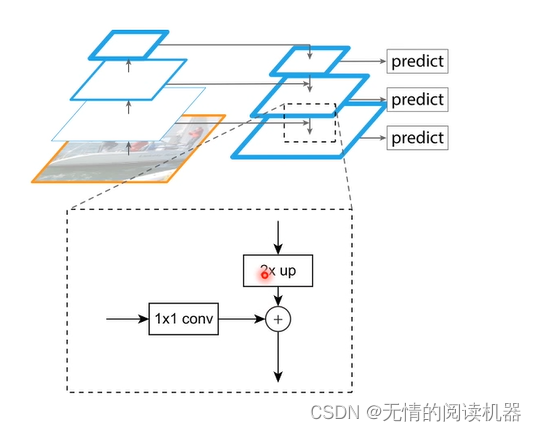

这个结构也是可以变的(可以灵活改变),如下所示

模型如下所示
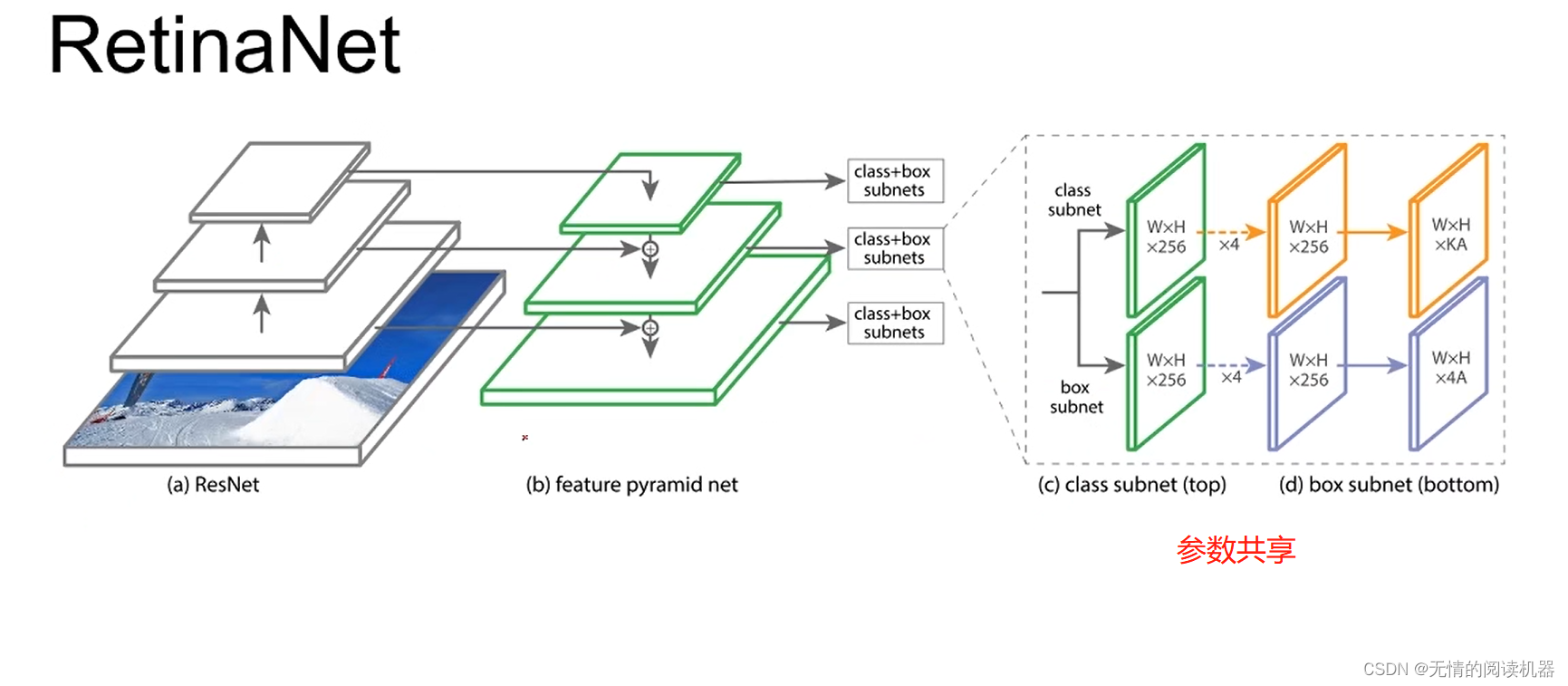
其中每个位置的anchor是9个,三个形状x三个比例
K是分类的数量,A是每个位置anchor是数量
4A,4是四个参数可以确定anchor的位置和大小。
3.代码讲解:
1.FPN分支部分

self.P5_1 = nn.Conv2d(C5_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P5_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
self.P5_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)

self.P4_1 = nn.Conv2d(C4_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P4_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
self.P4_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)

self.P3_1 = nn.Conv2d(C3_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P3_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)

self.P6 = nn.Conv2d(C5_size, feature_size, kernel_size=3, stride=2, padding=1)

self.P7_1 = nn.ReLU()
self.P7_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=2, padding=1)forward
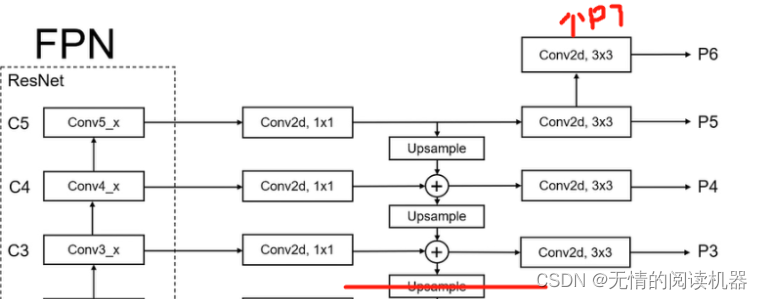
def forward(self, inputs):
#inputs 是主干模块conv3、conv4、conv5的输出
C3, C4, C5 = inputs
P5_x = self.P5_1(C5)
P5_upsampled_x = self.P5_upsampled(P5_x)
P5_x = self.P5_2(P5_x)
P4_x = self.P4_1(C4)
P4_x = P5_upsampled_x + P4_x
P4_upsampled_x = self.P4_upsampled(P4_x)
P4_x = self.P4_2(P4_x)
P3_x = self.P3_1(C3)
P3_x = P3_x + P4_upsampled_x
P3_x = self.P3_2(P3_x)
P6_x = self.P6(C5)
P7_x = self.P7_1(P6_x)
P7_x = self.P7_2(P7_x)
return [P3_x, P4_x, P5_x, P6_x, P7_x]

2.回归自网络

class RegressionModel(nn.Module):
def __init__(self, num_features_in, num_anchors=9, feature_size=256):
super(RegressionModel, self).__init__()
#其实num_features_in就等于256
self.conv1 = nn.Conv2d(num_features_in, feature_size, kernel_size=3, padding=1)
self.act1 = nn.ReLU()
self.conv2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act2 = nn.ReLU()
self.conv3 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act3 = nn.ReLU()
self.conv4 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act4 = nn.ReLU()
#4个参数就能确定anchor的大小
self.output = nn.Conv2d(feature_size, num_anchors * 4, kernel_size=3, padding=1)
def forward(self, x):
out = self.conv1(x)
out = self.act1(out)
out = self.conv2(out)
out = self.act2(out)
out = self.conv3(out)
out = self.act3(out)
out = self.conv4(out)
out = self.act4(out)
out = self.output(out)
# out is B x C x W x H, with C = 4*num_anchors
out = out.permute(0, 2, 3, 1)
#相当于展平了,-1的位置相当于所有anchor的数目
return out.contiguous().view(out.shape[0], -1, 4)
3.分类网络

class ClassificationModel(nn.Module):
def __init__(self, num_features_in, num_anchors=9, num_classes=80, prior=0.01, feature_size=256):
super(ClassificationModel, self).__init__()
self.num_classes = num_classes
self.num_anchors = num_anchors
self.conv1 = nn.Conv2d(num_features_in, feature_size, kernel_size=3, padding=1)
self.act1 = nn.ReLU()
self.conv2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act2 = nn.ReLU()
self.conv3 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act3 = nn.ReLU()
self.conv4 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act4 = nn.ReLU()
self.output = nn.Conv2d(feature_size, num_anchors * num_classes, kernel_size=3, padding=1)
self.output_act = nn.Sigmoid()
def forward(self, x):
out = self.conv1(x)
out = self.act1(out)
out = self.conv2(out)
out = self.act2(out)
out = self.conv3(out)
out = self.act3(out)
out = self.conv4(out)
out = self.act4(out)
out = self.output(out)
out = self.output_act(out)
# out is B x C x W x H, with C = n_classes + n_anchors
out1 = out.permute(0, 2, 3, 1)
batch_size, width, height, channels = out1.shape
out2 = out1.view(batch_size, width, height, self.num_anchors, self.num_classes)
return out2.contiguous().view(x.shape[0], -1, self.num_classes)
4.主干网络、训练和预测过程
1.网络结构

经过conv1缩小4倍,经过conv2不变,conv3、v4,v5都缩小两倍,p5到p6缩小两倍,p6到p7缩小两倍
p3相对于图片缩小了2的3次方,p4相对于图片缩小了2的4次方,以此类推
class ResNet(nn.Module):
#layers是层数
def __init__(self, num_classes, block, layers):
self.inplanes = 64
super(ResNet, self).__init__()
#这个是输入 conv1
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
#这是c2
self.layer1 = self._make_layer(block, 64, layers[0])
#这是c3
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
#这是c4
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
#这是c5
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
#得到c3、c4、c5输出的通道数
if block == BasicBlock:
fpn_sizes = [self.layer2[layers[1] - 1].conv2.out_channels, self.layer3[layers[2] - 1].conv2.out_channels,
self.layer4[layers[3] - 1].conv2.out_channels]
elif block == Bottleneck:
fpn_sizes = [self.layer2[layers[1] - 1].conv3.out_channels, self.layer3[layers[2] - 1].conv3.out_channels,
self.layer4[layers[3] - 1].conv3.out_channels]
else:
raise ValueError(f"Block type {block} not understood")
#创建FPN的分支部分
self.fpn = PyramidFeatures(fpn_sizes[0], fpn_sizes[1], fpn_sizes[2])
#创建回归网络
self.regressionModel = RegressionModel(256)
#创建分类网络
self.classificationModel = ClassificationModel(256, num_classes=num_classes)
self.anchors = Anchors()
self.regressBoxes = BBoxTransform()
self.clipBoxes = ClipBoxes()
self.focalLoss = losses.FocalLoss()
#权重初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
prior = 0.01
self.classificationModel.output.weight.data.fill_(0)
self.classificationModel.output.bias.data.fill_(-math.log((1.0 - prior) / prior))
self.regressionModel.output.weight.data.fill_(0)
self.regressionModel.output.bias.data.fill_(0)
#冻结bn层参数更新,因为预训练的参数已经很好了
self.freeze_bn()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = [block(self.inplanes, planes, stride, downsample)]
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def freeze_bn(self):
'''Freeze BatchNorm layers.'''
for layer in self.modules():
if isinstance(layer, nn.BatchNorm2d):
layer.eval()
2.训练过程和预测过程
1)anchor的调整
生成的预测值 regression [batch, anchor的数量,4] regression[:, :, 0]和[:, :, 1]用来移动anchor中心点 [:, :, 2]和[:, :, 3]用来改变框子的长度
import torch.nn as nn
import torch
import numpy as np
# 生成的预测值 regression [batch, anchor的数量,4] regression[:, :, 0]和[:, :, 1]用来移动anchor中心点 [:, :, 2]和[:, :, 3]用来改变框子的长度
class BBoxTransform(nn.Module):
def __init__(self, mean=None, std=None):
super(BBoxTransform, self).__init__()
if mean is None:
if torch.cuda.is_available():
self.mean = torch.from_numpy(np.array([0, 0, 0, 0]).astype(np.float32)).cuda()
else:
self.mean = torch.from_numpy(np.array([0, 0, 0, 0]).astype(np.float32))
else:
self.mean = mean
if std is None:
if torch.cuda.is_available():
self.std = torch.from_numpy(np.array([0.1, 0.1, 0.2, 0.2]).astype(np.float32)).cuda()
else:
self.std = torch.from_numpy(np.array([0.1, 0.1, 0.2, 0.2]).astype(np.float32))
else:
self.std = std
def forward(self, boxes, deltas):
#boxes就是图片所有的anchor[batch , 一张图片上anchor的总数 ,4]
widths = boxes[:, :, 2] - boxes[:, :, 0] # x2 - x1 = 宽
heights = boxes[:, :, 3] - boxes[:, :, 1] # y2 - y1 = 高
ctr_x = boxes[:, :, 0] + 0.5 * widths # x1 + 宽/2 = 中心点 x
ctr_y = boxes[:, :, 1] + 0.5 * heights # y1 + 高/2 = 中心点 y
dx = deltas[:, :, 0] * self.std[0] + self.mean[0]
dy = deltas[:, :, 1] * self.std[1] + self.mean[1]
dw = deltas[:, :, 2] * self.std[2] + self.mean[2]
dh = deltas[:, :, 3] * self.std[3] + self.mean[3]
pred_ctr_x = ctr_x + dx * widths
pred_ctr_y = ctr_y + dy * heights
pred_w = torch.exp(dw) * widths
pred_h = torch.exp(dh) * heights
pred_boxes_x1 = pred_ctr_x - 0.5 * pred_w
pred_boxes_y1 = pred_ctr_y - 0.5 * pred_h
pred_boxes_x2 = pred_ctr_x + 0.5 * pred_w
pred_boxes_y2 = pred_ctr_y + 0.5 * pred_h
pred_boxes = torch.stack([pred_boxes_x1, pred_boxes_y1, pred_boxes_x2, pred_boxes_y2], dim=2)
return pred_boxes
2总过程
def forward(self, inputs):
if self.training:
img_batch, annotations = inputs
else:
img_batch = inputs
x = self.conv1(img_batch)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x1 = self.layer1(x)
x2 = self.layer2(x1)
x3 = self.layer3(x2)
x4 = self.layer4(x3)
features = self.fpn([x2, x3, x4])
#shape[batch,每次anchor总数之和,4个值]
regression = torch.cat([self.regressionModel(feature) for feature in features], dim=1)
# shape[batch,每次anchor总数之和,分类个数]
classification = torch.cat([self.classificationModel(feature) for feature in features], dim=1)
anchors = self.anchors(img_batch)
if self.training:
return self.focalLoss(classification, regression, anchors, annotations)
else:
#得到调节参数之后的框子
transformed_anchors = self.regressBoxes(anchors, regression)
#保证框子在图片之内
transformed_anchors = self.clipBoxes(transformed_anchors, img_batch)
finalResult = [[], [], []]
#每个框对应类别的置信度
finalScores = torch.Tensor([])
#框对应的分类序号:第几类
finalAnchorBoxesIndexes = torch.Tensor([]).long()
#框的坐标
finalAnchorBoxesCoordinates = torch.Tensor([])
if torch.cuda.is_available():
finalScores = finalScores.cuda()
finalAnchorBoxesIndexes = finalAnchorBoxesIndexes.cuda()
finalAnchorBoxesCoordinates = finalAnchorBoxesCoordinates.cuda()
for i in range(classification.shape[2]):
scores = torch.squeeze(classification[:, :, i])
scores_over_thresh = (scores > 0.05)
if scores_over_thresh.sum() == 0:
# no boxes to NMS, just continue
continue
scores = scores[scores_over_thresh]
anchorBoxes = torch.squeeze(transformed_anchors)
anchorBoxes = anchorBoxes[scores_over_thresh]
anchors_nms_idx = nms(anchorBoxes, scores, 0.5)
finalResult[0].extend(scores[anchors_nms_idx])
finalResult[1].extend(torch.tensor([i] * anchors_nms_idx.shape[0]))
finalResult[2].extend(anchorBoxes[anchors_nms_idx])
finalScores = torch.cat((finalScores, scores[anchors_nms_idx]))
finalAnchorBoxesIndexesValue = torch.tensor([i] * anchors_nms_idx.shape[0])
if torch.cuda.is_available():
finalAnchorBoxesIndexesValue = finalAnchorBoxesIndexesValue.cuda()
finalAnchorBoxesIndexes = torch.cat((finalAnchorBoxesIndexes, finalAnchorBoxesIndexesValue))
finalAnchorBoxesCoordinates = torch.cat((finalAnchorBoxesCoordinates, anchorBoxes[anchors_nms_idx]))
return [finalScores, finalAnchorBoxesIndexes, finalAnchorBoxesCoordinates]
5.两种block的定义
import torch.nn as nn
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
6.anchor
1.每个位置的生成anchor函数
anchor的生成都是以原图为基准的
这个函数的作用是生成一个位置中所有的anchor,形式是(x1,y1,x2,y2)并且(X1,y1)和(x2,y2)关于中心对称,这样给定一个中点,可以直接拿(x1,y1,x2,y2)计算出相应的anchor
大概功能步骤:
1.确定每个位置anchor的数量:宽高比例数量x边长缩放比例数量
2.得到anchor的标准边长缩放后的结果 :base_size x scales
3.通过上述结果得到标准面积:(base_size x scales)的平方
2.通过h = sqrt(areas / ratio)和w = h * ratio得到宽高
3.得到每个anchor的两个坐标 (0-h/2 , 0-w/2) 和 (h/2 , w/2)
4.输出anchor
def generate_anchors(base_size=16, ratios=None, scales=None):
"""
Generate anchor (reference) windows by enumerating aspect ratios X
scales w.r.t. a reference window.
"""
if ratios is None:
ratios = np.array([0.5, 1, 2])
if scales is None:
scales = np.array([2 ** 0, 2 ** (1.0 / 3.0), 2 ** (2.0 / 3.0)])
#每个位置的anchor总数 n种规模 * m种比例
num_anchors = len(ratios) * len(scales)
# 初始化anchor的参数 x,y,w,h
anchors = np.zeros((num_anchors, 4))
# scale base_size
#np.tile(scales, (2, len(ratios))).T结果如下:
#[[1. 1. ]
# [1.25992105 1.25992105]
# [1.58740105 1.58740105]
# [1. 1. ]
# [1.25992105 1.25992105]
# [1.58740105 1.58740105]
# [1. 1. ]
# [1.25992105 1.25992105]
# [1.58740105 1.58740105]]
# shape (9, 2)
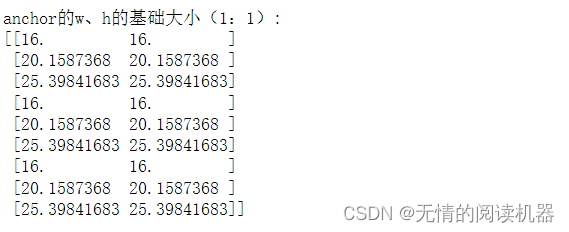
#设置anchor的w、h的基础大小(1:1)
anchors[:, 2:] = base_size * np.tile(scales, (2, len(ratios))).T
# 计算anchor的基础面积
#[area1,area2,area3,area1,area2,area3,area1,area2,area3]
areas = anchors[:, 2] * anchors[:, 3]
# correct for ratios
#利用面积和宽高比得到真正的宽和高
#根据公式1: areas / (w/h) = areas / ratio = hxh => h = sqrt(areas / ratio)
# 公式2:w = h * ratio
#np.repeat(ratios, len(scales))) = [0.5,0.5,0.5 ,1,1,1,2,2,2]
# 最终的效果就是 面积1的高宽,面积2的高宽,面积3的高宽
anchors[:, 2] = np.sqrt(areas / np.repeat(ratios, len(scales)))
anchors[:, 3] = anchors[:, 2] * np.repeat(ratios, len(scales))
# 转换anchor的形式 (x_ctr, y_ctr, w, h) -> (x1, y1, x2, y2)
# 左上角为中心点,形成9个anchor
anchors[:, 0::2] -= np.tile(anchors[:, 2] * 0.5, (2, 1)).T
anchors[:, 1::2] -= np.tile(anchors[:, 3] * 0.5, (2, 1)).T
return anchors演示步骤与效果如下所示:
pyramid_levels = [3, 4, 5, 6, 7]
strides = [2 ** x for x in pyramid_levels]
sizes = [2 ** (x + 2) for x in pyramid_levels]
ratios = np.array([0.5, 1, 2])
scales = np.array([2 ** 0, 2 ** (1.0 / 3.0), 2 ** (2.0 / 3.0)])num_anchors = len(ratios) * len(scales)
anchors = np.zeros((num_anchors, 4))anchors[:, 2:] = 16 * np.tile(scales, (2, len(ratios))).T
print("anchor的w、h的基础大小(1:1): ")
print(anchors[:, 2:])
areas = anchors[:, 2] * anchors[:, 3]
print("基础面积:" )
print(areas)

anchors[:, 2] = np.sqrt(areas / np.repeat(ratios, len(scales)))
anchors[:, 3] = anchors[:, 2] * np.repeat(ratios, len(scales))
print("宽度:")
print(anchors[:, 2])
print("高度:")
print(anchors[:, 3])

anchors[:, 0::2] -= np.tile(anchors[:, 2] * 0.5, (2, 1)).T
anchors[:, 1::2] -= np.tile(anchors[:, 3] * 0.5, (2, 1)).T
print("一个位置生成的anchor如下")
print("个数为:",anchors.shape[0] )
print(anchors)

2.为每个位置生成anchor
基本思想还是:
anchor的生成都是以原图为基准的
想要实现上述思想,最重要的就是得到特征图与原图的缩放比例(步长),比如stride=8,那么如果原图大小为(image_w,image_h)那么特征图相对于原图尺寸就缩小为(image_w/8 , image_h/8)
(计算结果是上采样的)
那么每个anchor的位置是由特征图决定的
x1∈( 0,1,2,3……image_w/8) y1∈( 0,1,2,3……image_h/8)
生成anchor的位置就是 c_x1 = x1+0.5 ,c_y1 = y1+0.5
因为anchor的生成是以原图为基准的,所以要将anchor在特征图的位置放大到原图,即在原图上生成anchor的位置是 c_x = c_x1 * stride , c_y = c_y1 * stride
def shift(shape, stride, anchors):
shift_x = (np.arange(0, shape[1]) + 0.5) * stride
shift_y = (np.arange(0, shape[0]) + 0.5) * stride
shift_x, shift_y = np.meshgrid(shift_x, shift_y)
shifts = np.vstack((
shift_x.ravel(), shift_y.ravel(),
shift_x.ravel(), shift_y.ravel()
)).transpose()
# add A anchors (1, A, 4) to
# cell K shifts (K, 1, 4) to get
# shift anchors (K, A, 4)
# reshape to (K*A, 4) shifted anchors
A = anchors.shape[0]
K = shifts.shape[0]
all_anchors = (anchors.reshape((1, A, 4)) + shifts.reshape((1, K, 4)).transpose((1, 0, 2)))
all_anchors = all_anchors.reshape((K * A, 4))
return all_anchors在代码层面上(anchors.reshape((1, A, 4)) + shifts.reshape((1, K, 4)).transpose((1, 0, 2)))
用到了向量相加的广播机制
向量a1维度是(k,1,4),含义是有K个位置,每个位置1份数据,每份数据4个参数(中心点)
向量a2维度是(1,A,4),含义是1个位置,每个位置A份数据,每份数据4个参数(anchor相对于中心点的位置坐标)
其中k是要在图像的k个位置上生成anchor,A是每个位置生成几个anchor
首先a2要在第0维复制k次(A,4)向量(为每个位置复制)
然后a1要在第1维复制A次(4)向下(为每个位置的每个anchor复制)
3.图片的anchor生成过程
最后输出的形状是 [1, 每层anchor数量之和 , 4]
class Anchors(nn.Module):
def __init__(self, pyramid_levels=None, strides=None, sizes=None, ratios=None, scales=None):
super(Anchors, self).__init__()
#提取的特征
if pyramid_levels is None:
self.pyramid_levels = [3, 4, 5, 6, 7]
#步长,在每层中,一个像素等于原始图像中几个像素
if strides is None:
self.strides = [2 ** x for x in self.pyramid_levels] #这个参数设置我没看懂
#每层框子的基本边长
if sizes is None:
self.sizes = [2 ** (x + 2) for x in self.pyramid_levels] #这个参数设置我也没看懂
#长宽比例
if ratios is None:
self.ratios = np.array([0.5, 1, 2])
#边长缩放比例
if scales is None:
self.scales = np.array([2 ** 0, 2 ** (1.0 / 3.0), 2 ** (2.0 / 3.0)])
def forward(self, image):
#image是原图 shape为 batch,channel,w,h
#这一步是获得宽和高
image_shape = image.shape[2:]
image_shape = np.array(image_shape)
#‘//’是向下取整 整个式子相当于向上取整,因为不满1步的也要算1步
#图像大小除以步长
#在对应的每一层中,原图在该层对应的大小
image_shapes = [(image_shape + 2 ** x - 1) // (2 ** x) for x in self.pyramid_levels]
# 创建x1,y1 x2,y2 anchor的位置坐标
all_anchors = np.zeros((0, 4)).astype(np.float32)
for idx, p in enumerate(self.pyramid_levels):
#传入该层anchor的基本边长,生成对应大小的anchor
anchors = generate_anchors(base_size=self.sizes[idx], ratios=self.ratios, scales=self.scales)
# 传入生成的anchor,和该层相对于原图的大小
shifted_anchors = shift(image_shapes[idx], self.strides[idx], anchors)
# 循环遍历完成之后,all_anchors的shape为 [每层anchor数量之和, 4]
all_anchors = np.append(all_anchors, shifted_anchors, axis=0)
# 最后输出的形状是 [1, 每层anchor数量之和 , 4]
all_anchors = np.expand_dims(all_anchors, axis=0)
if torch.cuda.is_available():
return torch.from_numpy(all_anchors.astype(np.float32)).cuda()
else:
return torch.from_numpy(all_anchors.astype(np.float32))
7.dataset
以csvdataset为例