前面我们已经安装好了VMware并且已经成功安装了Ubuntu系统,接下来就是装对应版本的ros了。
一、版本的选择
Ros系统是一个依赖于linux的机器人操作系统,所以在装ROS系统前需要一个合适的linux系统。目前主流版本为Ubuntu、Debian、SlackwareLinux、Red Ha等为主。
对ROS兼容性最好的当属Ubuntu系统。每个Ubuntu系统对应其相应的ros系统,如下:
| Ros版本 | Ubuntu系统 |
|---|---|
| ROS Melodic Morenia | Ubuntu 18.04(Bionic)/Ubuntu 17.04 Artful |
| ROS Lunar Loggerhead | Ubuntu 17.04 (Zesty)/Ubuntu 16.10 Yakkety, Ubuntu LTS 16.04 Xenial |
| ROS Kinetic Kame | Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| ROS Jade Turtle | Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| ROS Indigo Igloo | Ubuntu 14.04 (Trusty) |
| ROS Hydro Medusa | Ubuntu 12.04 LTS (Precise) |
所以说,安装时候要根据版本对应对其进行安装。目前ros流行版统为indigo、kinetic。此教程是indigo版本的安装方法,Ubuntu版本为64位的14.04 LTS。
二、安装步骤 (在安装过程中有的步骤会出现经典型错误,我将重点标注出来,解决办法参考下一篇文章)
1.配置Ubuntu系统。
打开系统设置,打开Ubuntu系统的软件与更新,并在菜单栏中选择Ubuntu Software,在这一栏中选中“restricted”、“universe”、“multiverse”,并将来源修改为清华的源头,如下:

图1
2.配置 sources.list
同时按住Ctrl+Alt+T打开终端,在终端中输入如下命令:
配置sources.list 使得计算机能够从package.ros.org接收软件。
对于Ubuntu 14.04:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'`
3.安装keys
$ sudo apt-key adv --keyserver hkp://pool.sks-keyserver.net --recv-key 0XB01FA116
4.安装
首先输入如下指令进行刷新:
$ sudo apt-get update
接下来安装ROS包,根据不同的功能,Ros有如下四中安装:
(1)桌面完整版安装(推荐):ROS、rqt、rviz robot_generic库、2D/3D仿真器、导航以及2D/3D感知。
$sudo apt-get install ros-indigo-desktop-full
(2)桌面安装:ROS、rqt、rviz、robot_generic库。
$sudo apt-get install ros-indigo-desktop
(3)ROS-Base:ROS的主要功能包、build和communication库等。
$ sudo apt-get install ros-indigo-ros-base
(4)独立的功能包:安装特定的ROS功能包。
$ sudo apt-get install ros-indigo-ros-PACKAGE
本人选择的是第一种,输入指令后运行到一半会提示:您希望继续执行吗?[Y/n],选择Y回车继续,等待安装。时间较长,请耐心等待。
在安装过程中可能会出现某些包无法下载等,重复第4步,直到成功界面出现。
安装完成的界面如图2所示:
图2
安装完成以后,可以使用以下命令来查看已安装的功能包:
$ apt-cache search ros-groovy
5.初始化rosdep(此步骤一般会出现错误,若出现错误请看解决文章
错误的解决办法
)
$ sudo rosdep init
$ rosdep update
初始化成功界面如下:
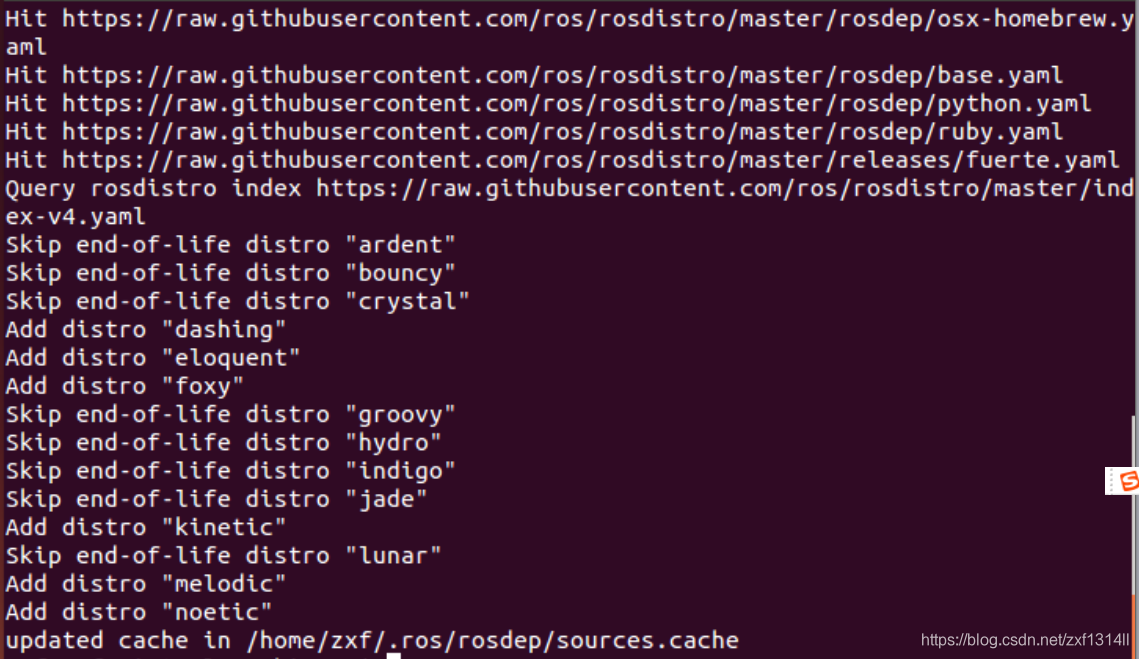
图3
6.环境设置
运行下面命令,为Indigo版本设置环境:
$ source /opt/ros/indigo/setup.bash
为了实现环境的自动设置,可以将上面的命令写入.bashrc文件。
$ echo "source /opt/ros/indigo/setup.bash">> ~/.bashrc
$ source ~/.bashrc
7.安装rosinstall
rosinstall是ROS中一个经常使用的命令工具,他可以很容易的为ROS功能包下载source树。运行下面命令:
$ sudo apt-get install python-rosinstall
执行到一半,系统会给出提示:您希望继续执行吗?选择Y后回车继续,完成后的界面如图4所示:
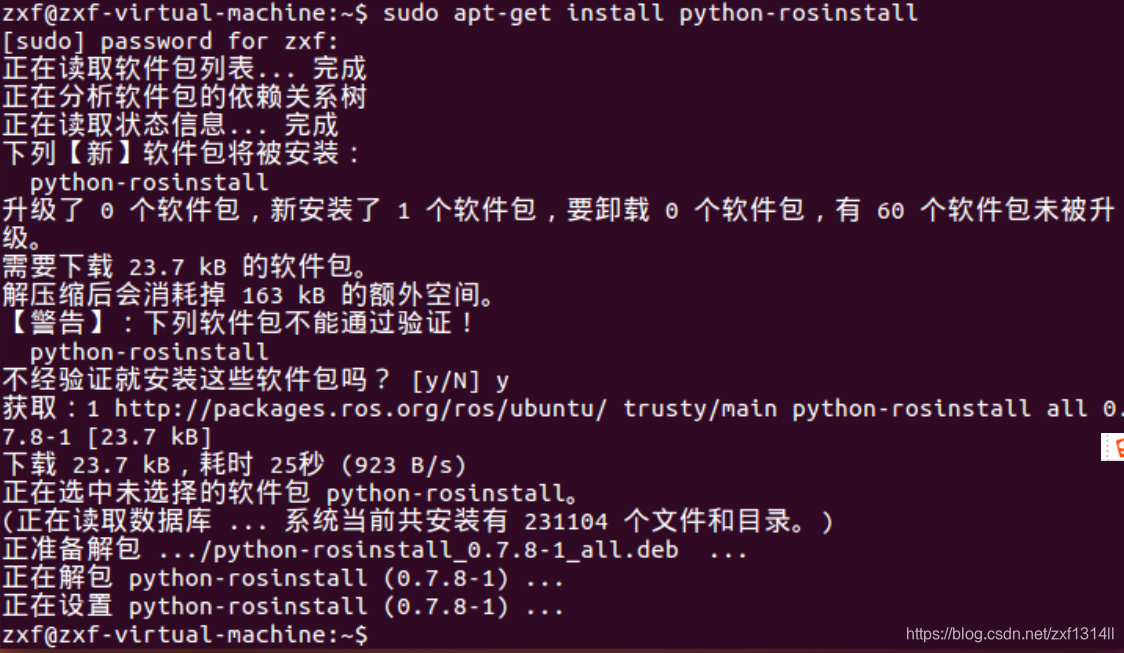
图4
到这儿整个ROS环境的安装就已经完成了。
8.验证ROS是否安装成功
roscore
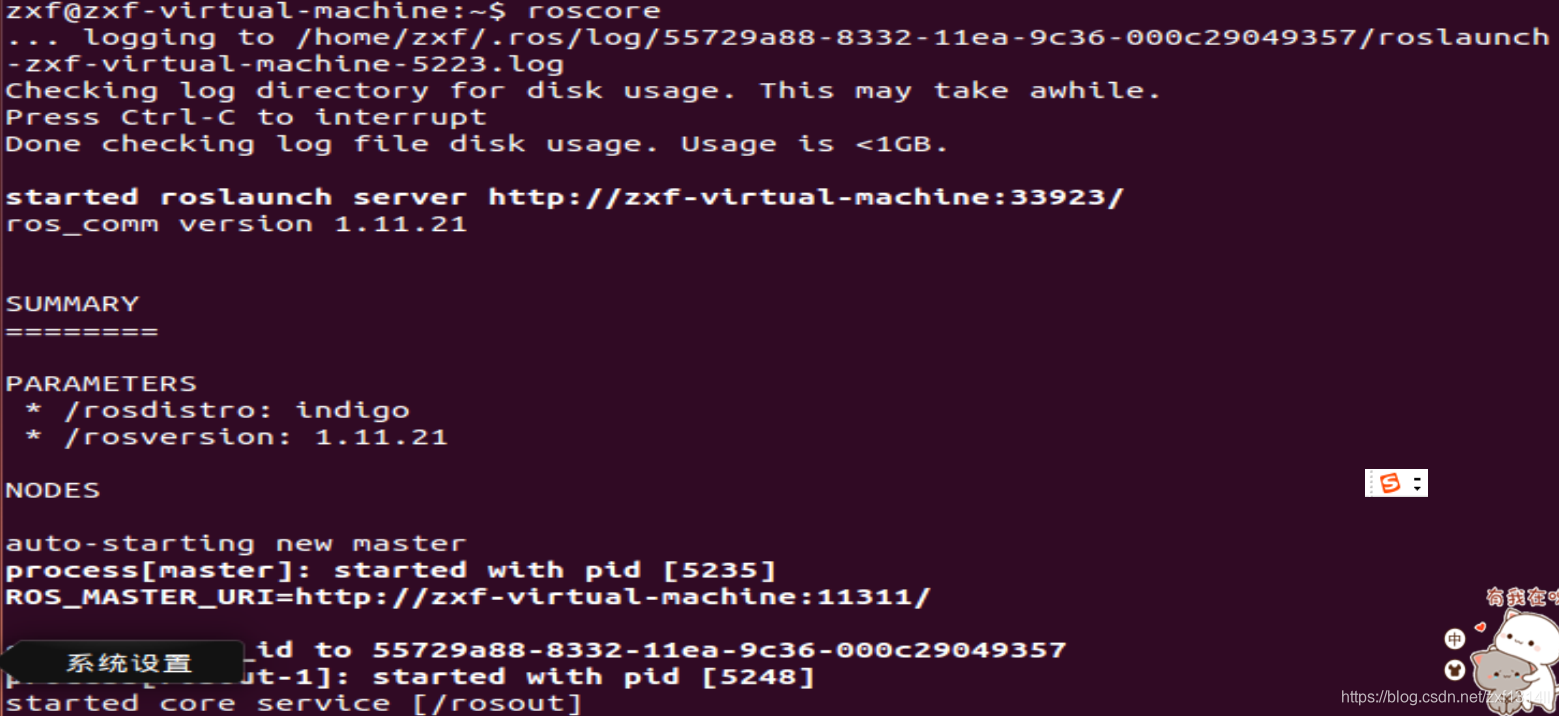
图5
9.进一步验证ROS是否安装成功
在刚才的终端中输入roscore命令后,然后再打开一个终端,依次输入如下指令:
rosrun turtlesim turtlesim_node
这时我们会看到一个蓝色的窗口,该窗口正中间有一只小乌龟。
再打开一个终端,运行以下命令:
rosrun turtlesim turtle_teleop_key
选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动,说明成功,如下图所示:
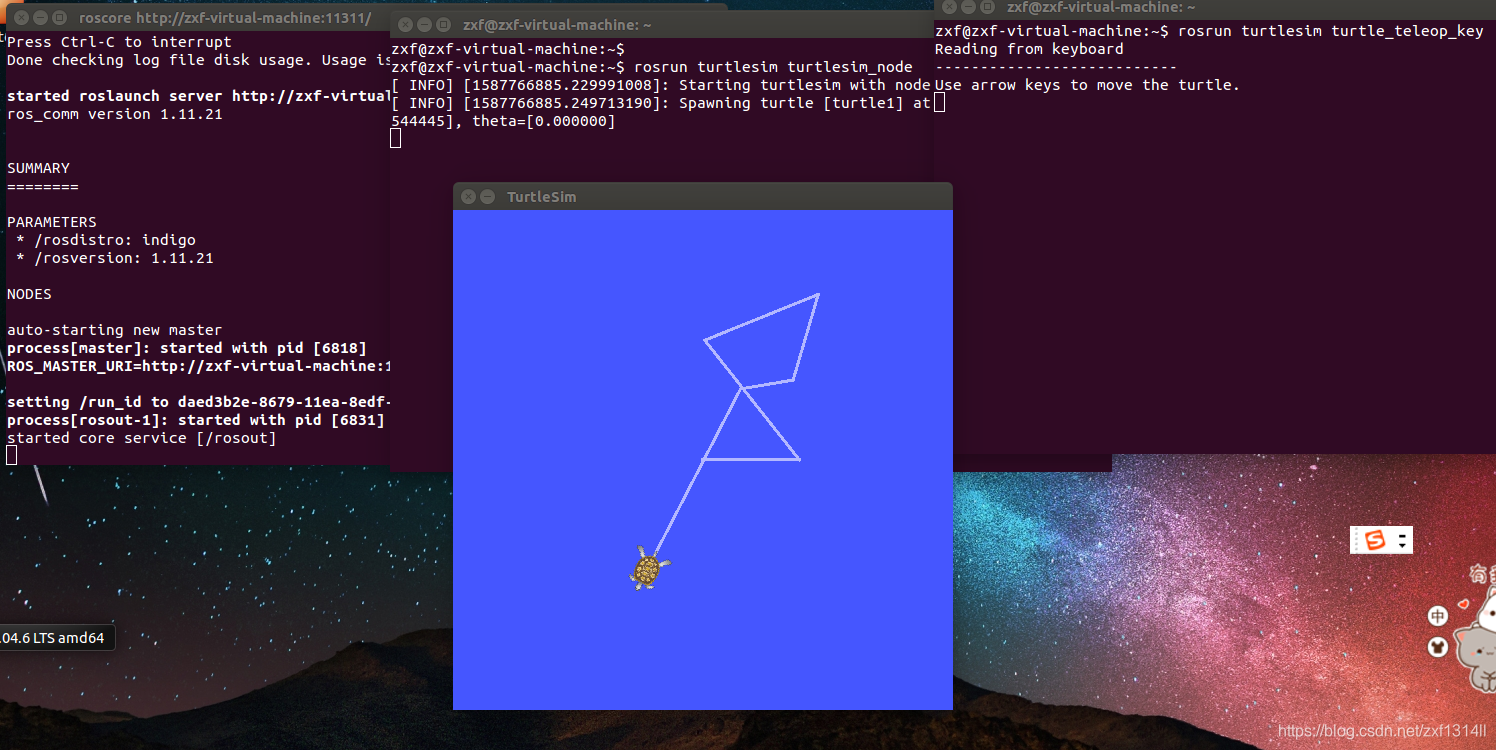
图6
10.ROS的图形化界面
新开一个terminal,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
rosrun rqt_graph rqt_graph
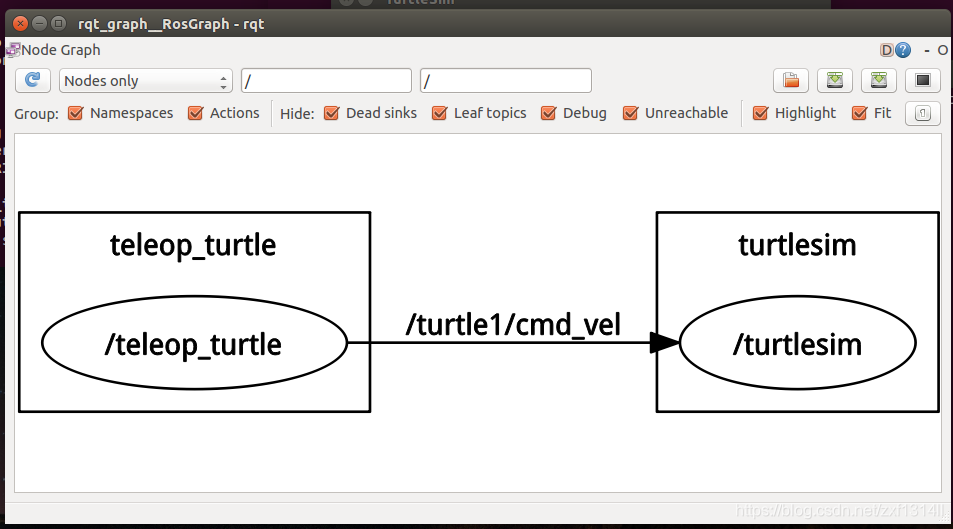
图7
到此,说明ROS安装成功。恭喜您,完成了安装!接下来安装其他东西吧,加油!