导引:
我们在笔记2中提到了SLAM问题的基本方程,它由
运动方程
和
观测方程
组成。接下来我们要讨论的就是运动方程。
运动方程用来表述传感器的位姿变化。所谓“位姿”,包含
位置
和
姿态
两方面。表述位姿变化的问题就是描述刚体在三维空间中的运动。
刚体的三维空间运动(对应于“位姿变化”)可以分解为平移运动(对应于“位置变化”)和旋转运动(对应于“姿态变化”):
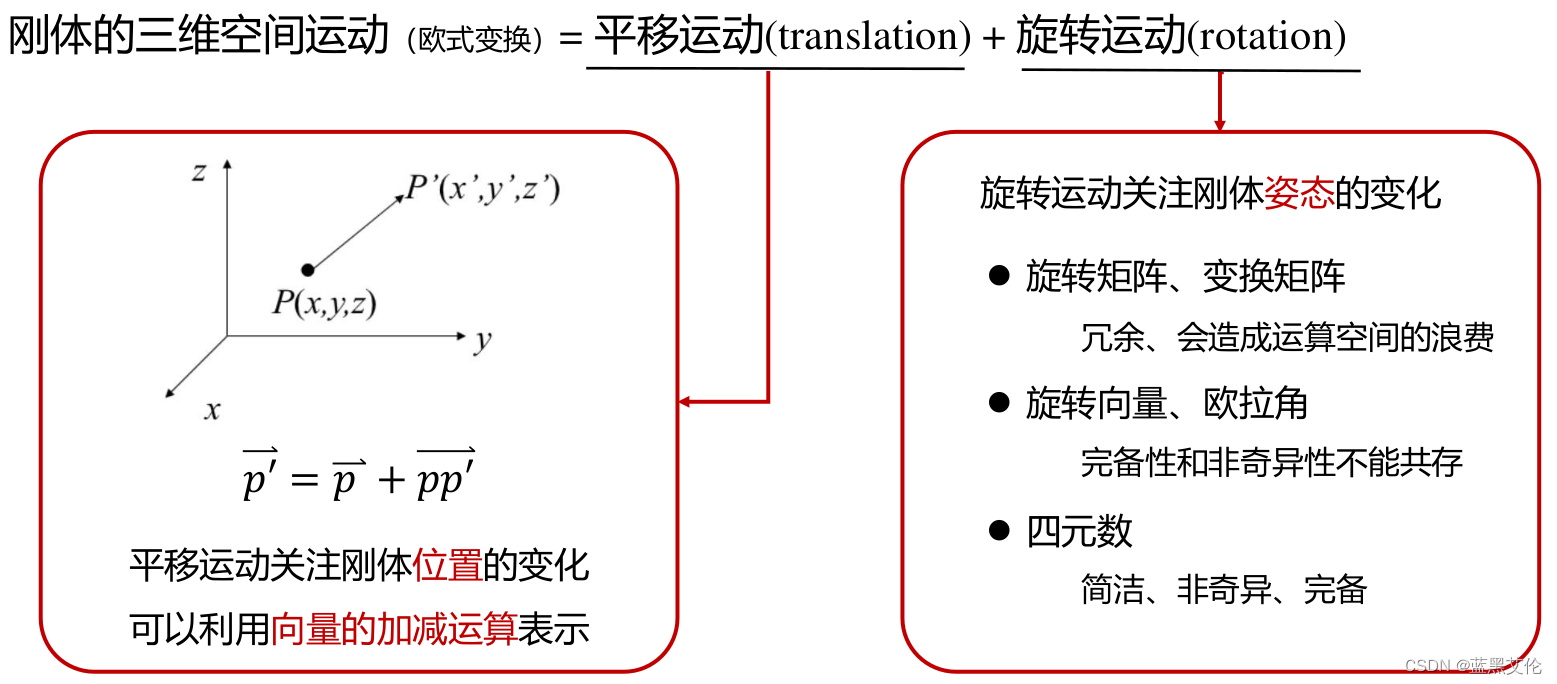
平移运动表述的是刚体位置的变化,可以用向量的加减运算来表示。 旋转运动表述的是刚体姿态的变化,可以用旋转矩阵、旋转向量或者四元数来表示。
一、旋转矩阵、变换矩阵和齐次坐标:
1.欧氏变换与旋转矩阵:
(1)两个坐标系及其转换:
在描述刚体的三维运动时,常见的做法是设置两个坐标系:
惯性坐标系
(世界坐标系)和
移动坐标系
。
认为惯性坐标系是静止不动的,相机或机器人是移动坐标系。

对于向量 ?:在世界坐标系下其坐标为??;相机视野下,其坐标为??。为了转换这两个坐标,要先得到该点针对移动坐标系的坐标值,再根据
机器人位姿
变换到世界坐标系中。这种变换需要用一个
矩阵T
来描述。
(2)刚体运动:
两个坐标系之间的运动由
一个旋转和一个平移
组成,这种运动称为
刚体运动
。刚体运动过程中,同一个向量在各个坐标系下的长度和夹角都不会发生变化,仅相差了一个欧式变换。
(3)欧氏变换与旋转矩阵:
坐标系间的欧氏变换由一次平移和一次旋转组成。

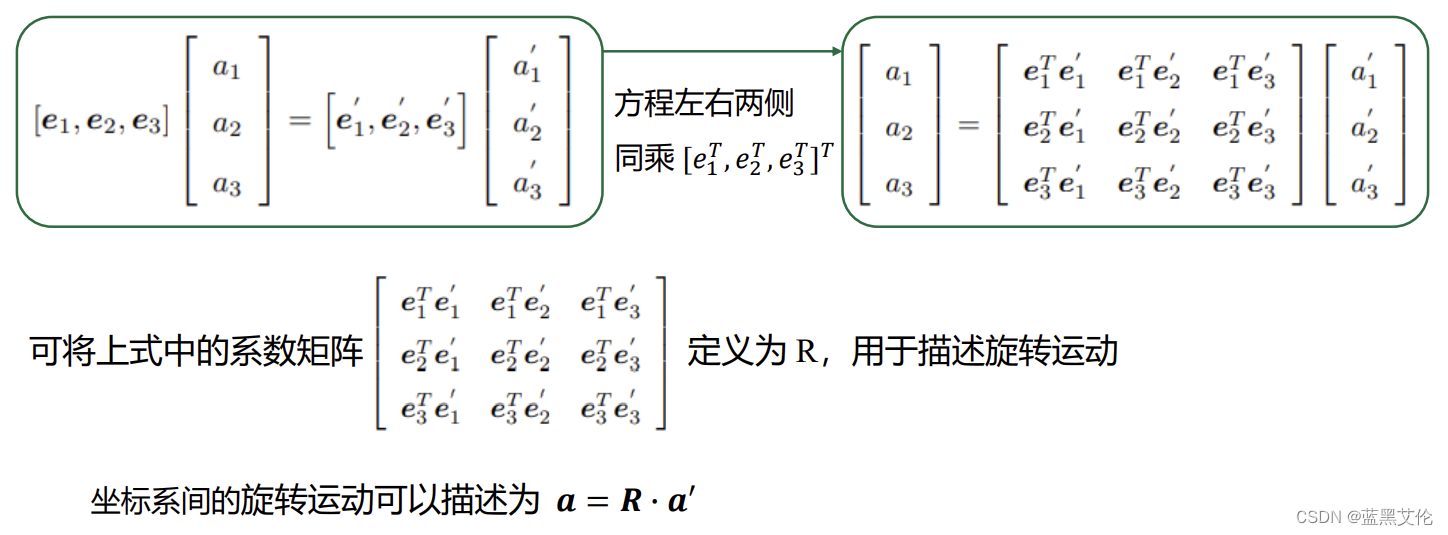
这个矩阵R就是旋转矩阵
,它由两组基之间的内积组成,刻画了旋转前后同一个向量的坐标变换关系。只要旋转是一样的,这个矩阵就是一样的。
由于基向量的长度为1,所以实际上是各基向量夹角的余弦值,因此该矩阵也称为
方向余弦矩阵
。
(4)旋转矩阵的性质:
旋转矩阵是行列式为1的正交矩阵;反之,行列式为1的正交矩阵也是一个旋转矩阵(充要条件)。
(5)特殊正交群:

群的概念会在之后的笔记6中提到。
(6)旋转矩阵的逆:
旋转矩阵的逆(即转置)描述了一个相反的旋转。
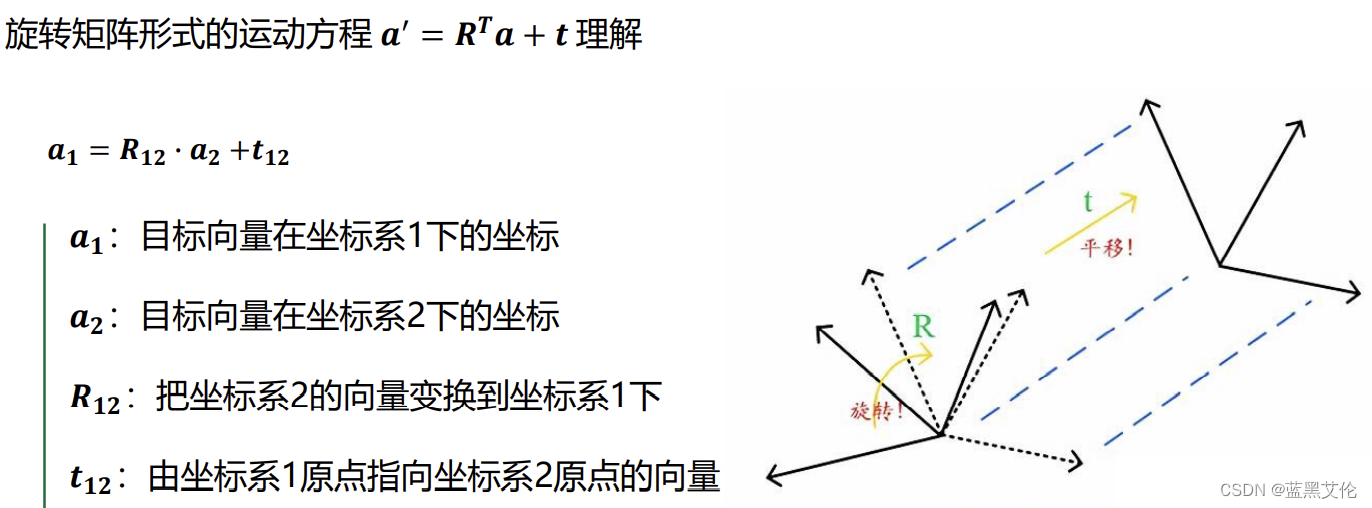
(7)旋转矩阵形式的运动方程:
R是旋转向量,描述一次旋转;t是平移向量,描述一次平移。
2.变换矩阵和齐次坐标:
(1)旋转矩阵形式的运动方程的缺点:
旋转矩阵形式的运动方程的变换不是线性关系,在连续变换多次后形式会非常复杂。

为了简化运算,引入齐次坐标和变换矩阵。
(2)齐次坐标:
在三维向量的末尾添加一个1,使其变为四维向量,称为
齐次坐标
。
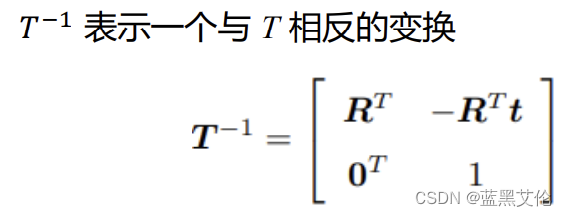
(3)变换矩阵:

同样地,变换矩阵的逆表示与其相反的变换:
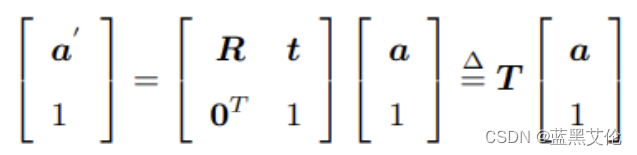
(4)变换矩阵的结构特征:
左上角为旋转矩阵,右侧为平移向量,左下角为零向量,右下角为1。
(5)变换矩阵形式的运动方程:

(6)特殊欧氏群:

二、旋转向量和欧拉角:
1.矩阵表示方式的缺点:
(1)SO(3) 的旋转矩阵有 9 个量,但只用于描述 3 个自由度的运动;
(2)SE(3) 的变换矩阵有 16 个量,但只用于描述 6 个自由度的运动。
这说明矩阵表示方式不够紧凑,造成了运算空间的浪费。此外,旋转矩阵必须是正交矩阵且行列式为1,变换矩阵同样具有对应的要求,这些约束会给优化与求解造成困难。因此需要寻找一种更简洁紧凑的表示法。
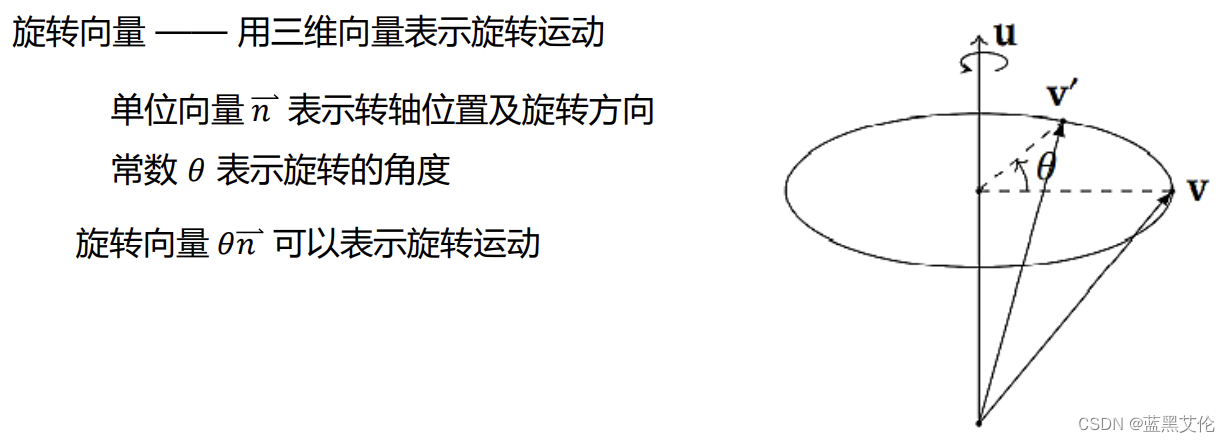
2.旋转向量:
(1)旋转向量的定义:
一个向量,其方向与旋转轴一致,而长度等于旋转角,这种向量称为旋转向量。
(2)旋转向量到旋转矩阵的转换过程:
从旋转向量到旋转矩阵的转换过程由
罗德里格斯公式
表明,推导过程较为复杂,这里不做描述,只给出转换结果:

(3) 旋转矩阵到旋转向量的转换过程:

3.欧拉角:
(1)什么是欧拉角:
相较于旋转矩阵和旋转向量这种不太直观的描述旋转的方式,欧拉角显得非常直观:使用3个分离的转角,将一个旋转分解成3次绕不同轴的旋转。
(2)常用的欧拉角定义:
“偏航 – 俯仰 – 滚转”(yaw-pitch-roll) (X轴指向刚体前方,Y轴指向右侧,Z轴指向上方)
1)绕物体 Z 轴旋转,得到偏航角 yaw
2)绕旋转之后 的 Y 轴旋转,得到俯仰角 pitch
3)绕旋转之后 的 X 轴旋转,得到滚转角 roll
(3)欧拉角的缺点(万向锁问题,了解):
在俯仰角为±90°时,第一次旋转与第三次转转将使用同一个轴,使得系统丢失了一个自由度(由3次旋转变成2次旋转)
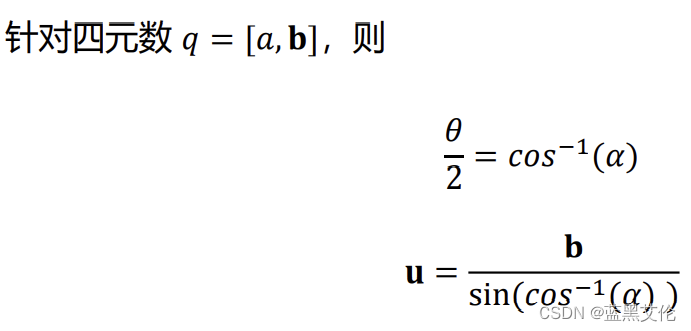
三、四元数:
1.为什么引入四元数概念:
(1)旋转矩阵用9个量描述3个自由度,具有冗余性;
(2)旋转向量和欧拉角是紧凑的,但具有奇异性,事实上也找不到不带奇异性的三维向量描述方式。
在表达三维旋转时,有一种类似于复数(复数集可用来表示复平面上的向量)的代数:
四元数
。它既是紧凑的,也没有奇异性,少有的缺点是不够直观、运算稍复杂。
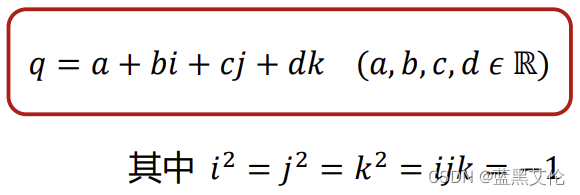
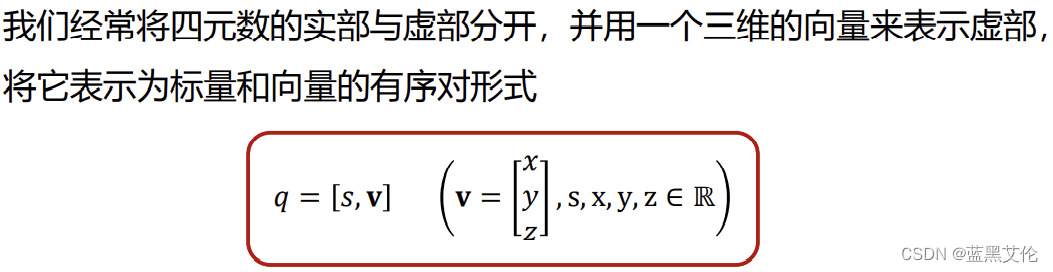
2.四元数的定义:
(1)四元数的表示方法:
1)
2)
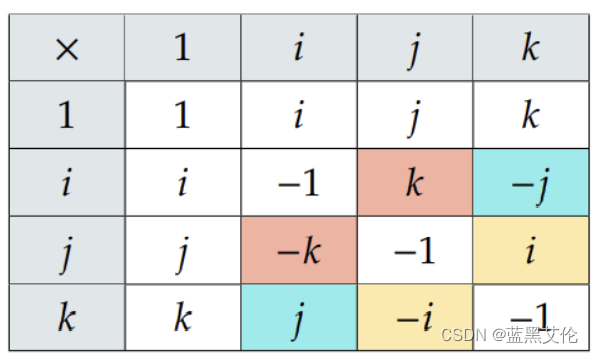
(2)i,j,k三者间的运算关系:
3.四元数的运算:
(1)加法和减法:
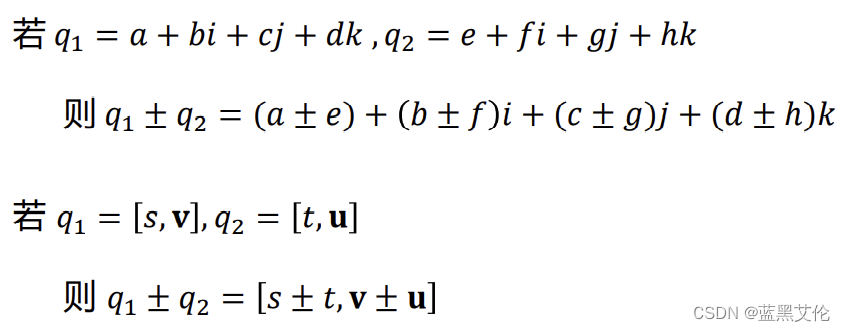
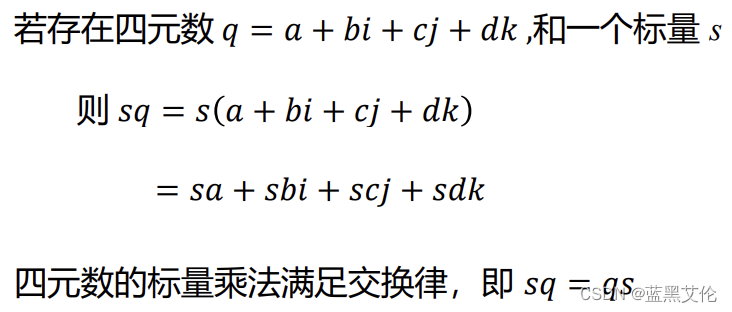
(2)数乘:
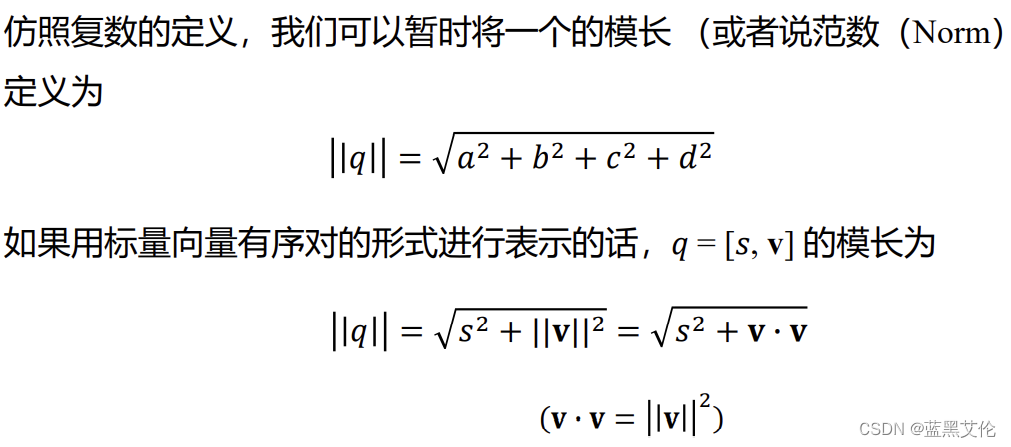
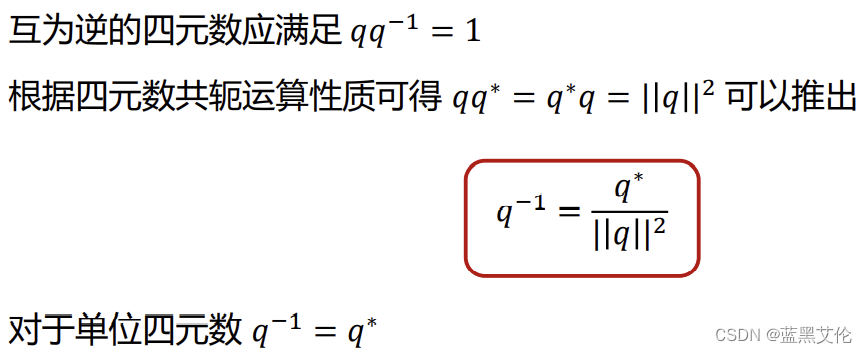
(3)模长:
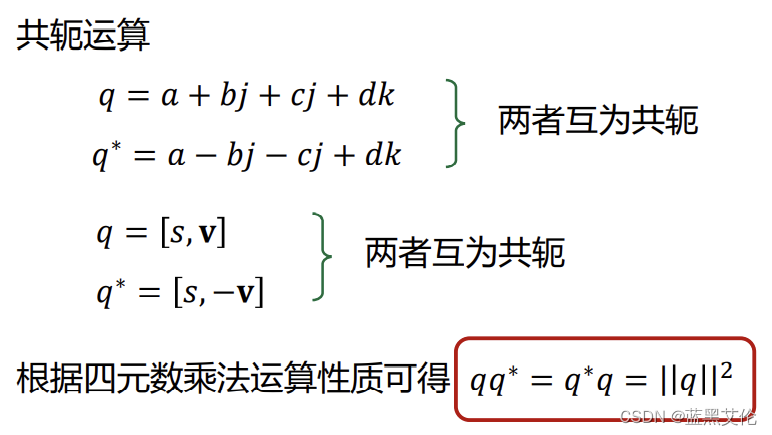
(4)共轭:
(5)逆:
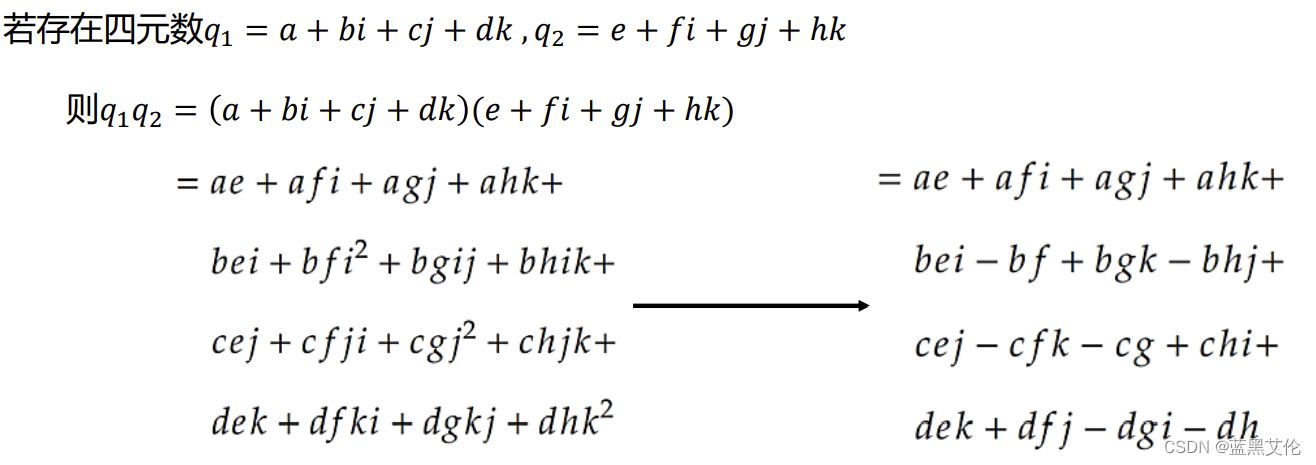
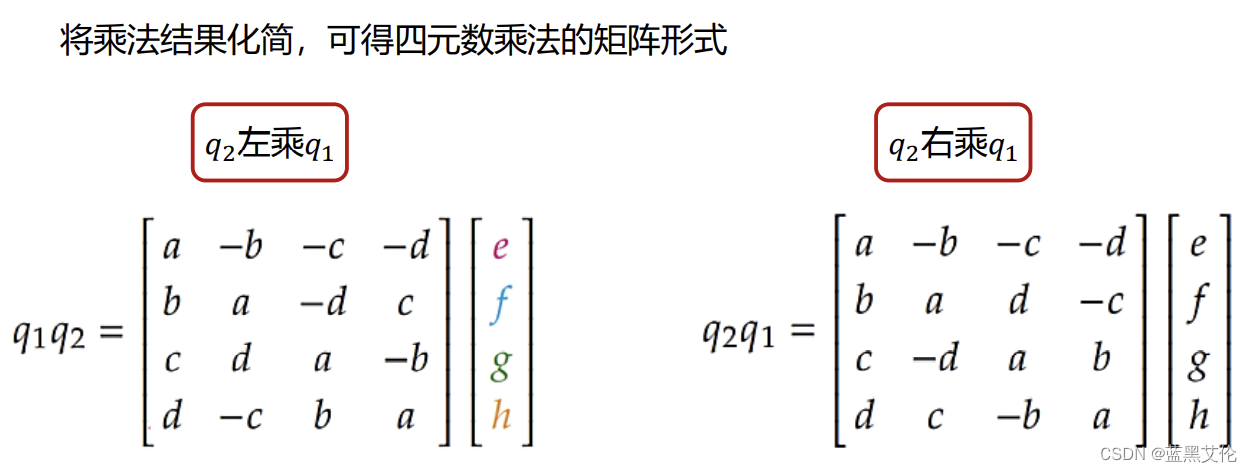
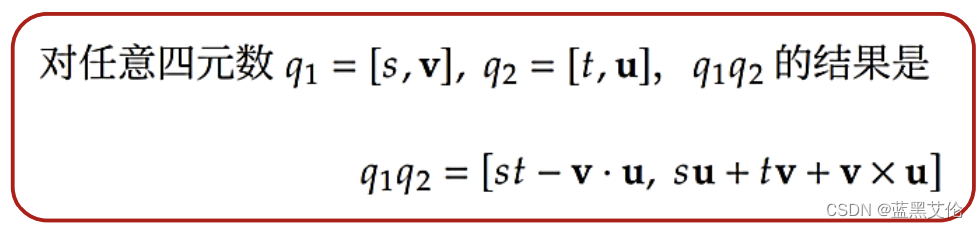
(6)乘法:
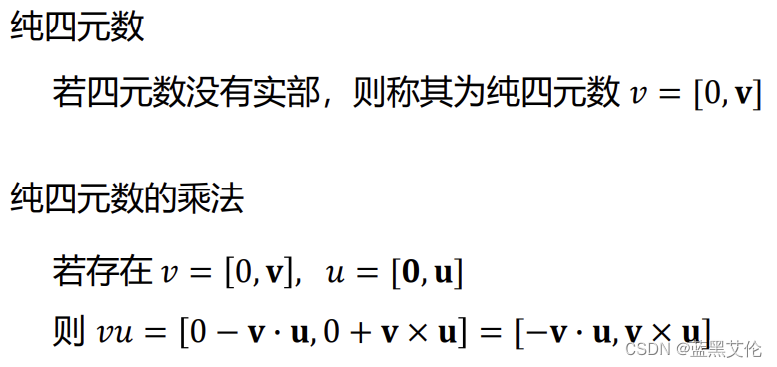
(7)纯四元数:
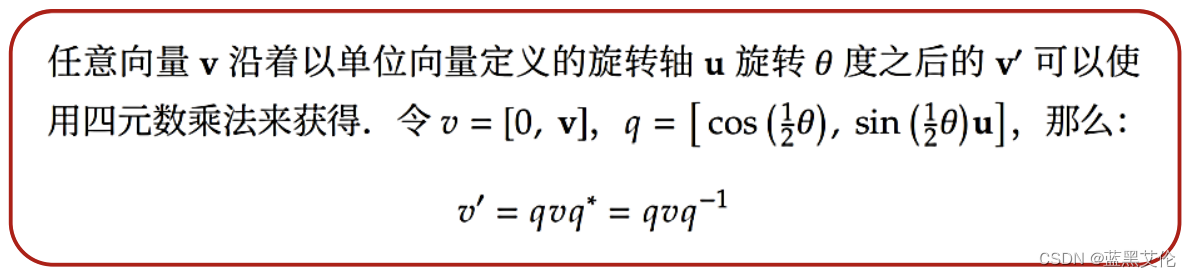
4.用四元数表示三维旋转:
(推导过程略)
5.四元数与旋转向量的变换: