About
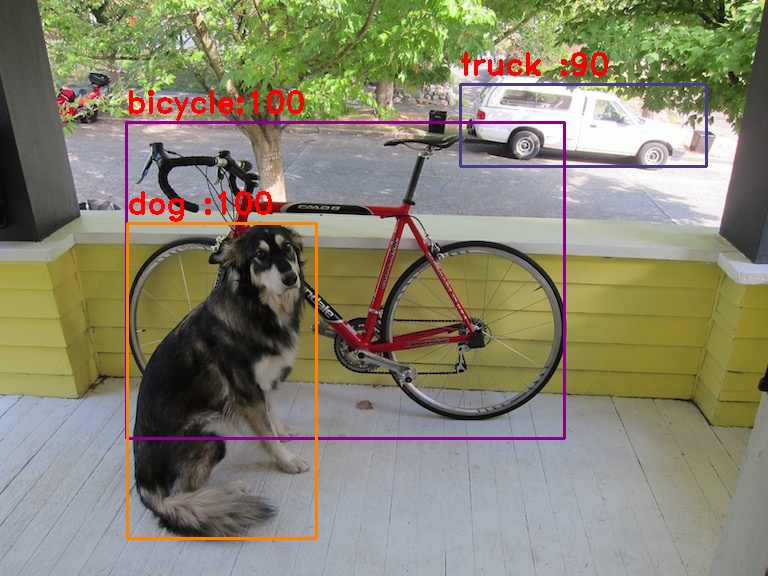
在瑞芯微rockchip的AI芯片rv1109上,利用rknn和opencv库,修改了官方yolov3后处理部分代码Bug,交叉编译yolov3-demo示例后可成功上板部署运行。
项目地址(含工程源代码):
rockchip_rv1109_rknn-yolov3-demo
![]()
https://github.com/BaronLeeLZP/rockchip_rv1109_rknn-yolov3-demo
rockchip_rv1109_rknn-yolov3-demo
在瑞芯微rockchip的AI芯片rv1109上,利用rknn和opencv库,修改了官方yolov3后处理部分代码Bug, Ubuntu18.04系统,瑞芯微交叉编译工具链,yolov3-demo示例后可成功上板部署运行。 同时,对在瑞芯微rockchip的其他AI芯片上利用NPU rknn部署CNN模型提供参考和借鉴。 以下为demo工程说明:
libopencv_api
交叉编译时所依赖的opencv库,本工程opencv版本为4.3.0,已经打包好了; 亦可根据自己项目需要选择不同版本/不同阉割程度的opencv依赖库,需自行编译。
librknn_api
交叉编译时所依赖的rknn库,瑞芯微官方提供,rknn_api.h/librknn_api.so; 使用过程详见yolov3检测模型的预处理/加载/推断过程,main.cpp文件。
src
yolov3_post_process.h
yolov3 rknn模型推断原始结果的后处理函数接口:
- int outputs_transform(rknn_output rknn_outputs[], int net_width, int net_height, detection* dets);首要的后处理操作,数据转换。
- int do_nms_sort(detection *dets, int total, int classes, float thresh);非极大值抑制算法实现,欢迎码友提供更高效代码的实现。
- int draw_image(cv::Mat img, detection* dets, int total, float thresh);利用opencv绘制检测结果输出图像并保存为out.jpg。 可封装为标准的输入输出接口
yolov3_post_process.cpp
yolov3 rknn模型推断原始结果的后处理过程详细的代码实现
main.cpp
demo主函数代码实现,可了解物体检测时rknn接口函数调用过程。 识别模型相比较于检测模型的推断,处理过程则更简单。
交叉编译环境
交叉编译工具见瑞芯微rockchip官方提供的SDK,路径位于
SDK/prebuilts/gcc/linux-x86/arm/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf
手里拿有板子的码友应该都有SDK的,对吧。依照文档配置好交叉编译环境。
demo使用步骤如下:
-
工程编译生成test可执行文件; 命令
make
-
工程编译生成libyolo库文件; 命令
make arm_lib
-
在rv11xx上运行test文件可得yolov3-demo运行结果。 将test文件/dog.jpg图像及其依赖库移植到RV1109上,登录嵌入式系统,命令./test,运行demo即可得out.jpg文件输出结果。

如有技术问题欢迎交流!
如有版权问题请及时告知!
欢迎技术交流与合作!