一,PWM基本原理
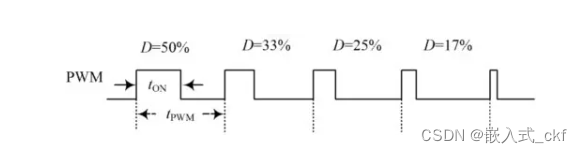
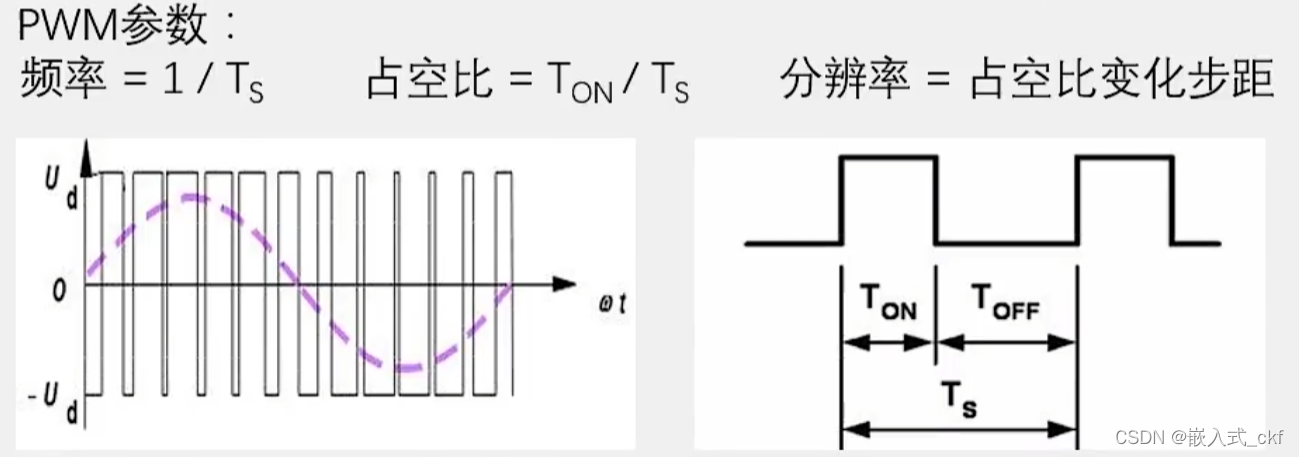
所谓PWM,就是脉冲宽度调制技术,其具有两个很重要的参数:频率和占空比。频率,就是周期的倒数;占空比,就是高电平在一个周期内所占的比例。如当周期T=T1+T2;T1为高电平时间,T2为低电平时间,此时频率F的值为1/(T1+T2),占空比D的值为T1/(T1+T2)。通过改变单位时间内脉冲的个数可以实现调频;通过改变占空比可以实现调压。占空比越大,所得到的平均电压也就越大,幅值也就越大;占空比越小,所得到的平均电压也就越小,幅值也就越小,如动图演示所示。PWM方波的示意图如下图所示:

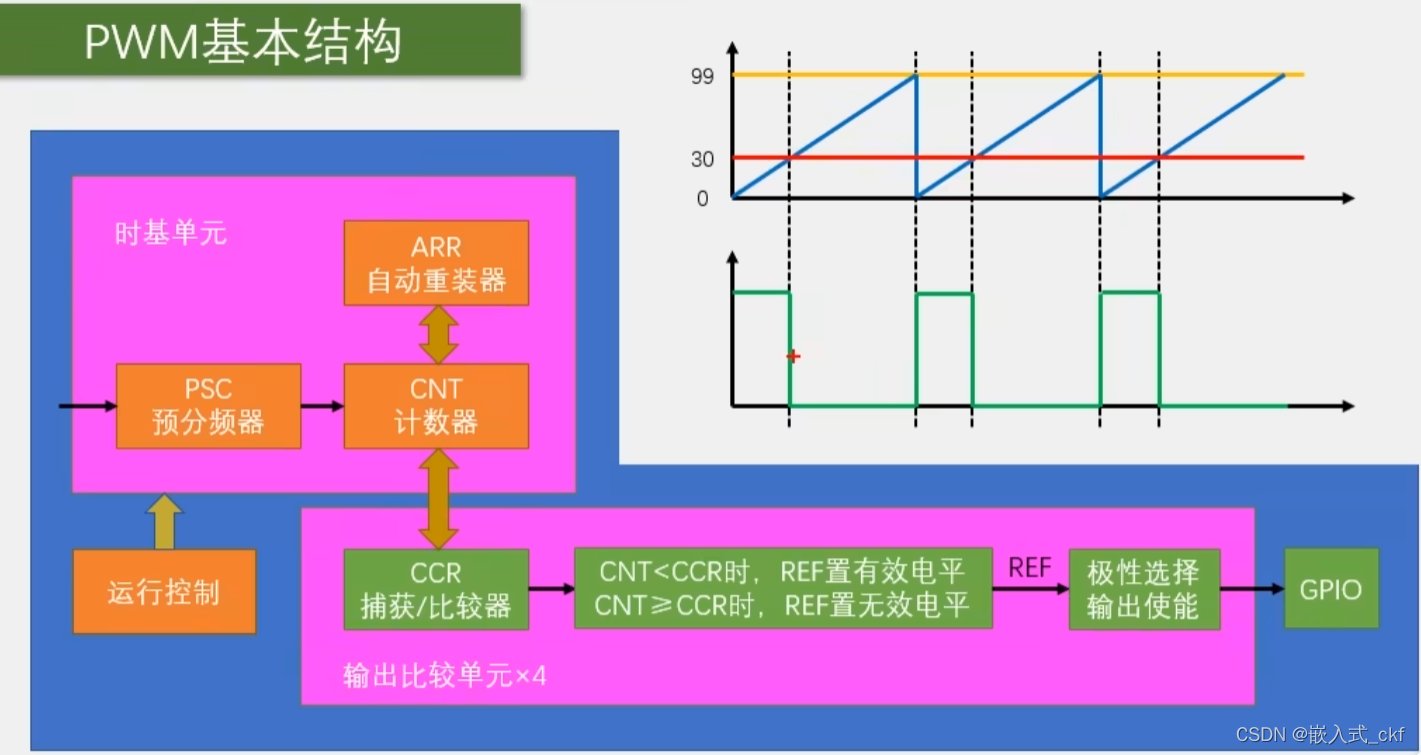
二,PWM基本结构及配置PWM步骤
第1步,RCC开启时钟,把我们要用的TlM外设和GPIO外设的时钟打开。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
第2步,配置时基单元,包括时钟源选择
TIM_InternalClockConfig(TIM2);//这里选用内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//配置参数
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 – 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 – 1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
第3步,配置输出比较单元
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
OC就是Output Compare(输出比较)OC1,OC2,OC3,OC4,一个函数配置一个单元(输出比较通道),上面这四个函数用于设置输出PWM时用到的参数,包括选择PWM输出模式,选择输出极性,设置比较值。注意:设置输出时是按输出通道分的库函数。即需要初始化哪个通道,就调用哪个函数。不同的通道对应的GPIO口也是不一样的。
TIM_OCInitTypeDef TIM_OCInitStructure;配置参数 TIM_OCStructInit(&TIM_OCInitStructure);//用来给输出比较结构体成员赋一个默认值的,下面 就可以再更改你想改的值就行了。可以避免结构体成员没有配置完整。
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
第4步,配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
第五步,运行控制,启动计数器,这样就能输出PWM了。
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
这四个函数是用来单独更改CCR寄存器值的函数,可以运行的时候,更改占空比。TIM_Cmd(TIM2, ENABLE);
TIM_SetCompare1(TIM2, Compare1);
第6步,主程序
while(1)
{
for (uint8_t i = 0; i < 100; i ++)
{
PWM_SetCompare1(i);
delay_ms(10);
}
for (uint8_t i = 0; i < 100; i ++)
{
PWM_SetCompare1(100 – i);
delay_ms(10);
}
delay_ms(500);
}