二十世纪四十年代 M-P 神经元模型、Hebb 学习律出现后,五十年代出现了以感知机、Adaline 为代表的一系列成果。后来因为单层神经网络无法解决非线性问题,而多层网络的训练算法尚看不到希望,神经网络研究进入“冰河期”。哈佛大学的 Paul Werbos 在 1974 年发明 BP 算法时,正值“冰河期”,因此未受到重视。
1983 年,物理学家 John Hopfield 利用神经网络,在旅行商问题这个 NP 完全问题的求解上获得了当时最好的结果,引起轰动。稍后,UCSD 的 Rumelhart 等人重新发明了 BP 算法,再次掀起研究神经网络的热潮。二十世纪九十年代中期,随着统计学习理论和支持向量机的兴起,神经网络学习的理论性质不够清楚、试错性强、在使用中充斥大量“窍门”的弱点更为明显,于是神经网络的研究又进入低谷。
2010 年前后,随着计算能力的迅猛提升和大数据的涌现,神经网络研究在“深度学习”的名义下又重新崛起,先是在 ImageNet 等若干竞赛上以大优势夺冠,此后谷歌、百度、脸书等公司纷纷投入巨资进行研发,神经网络迎来第三次高潮。
1. 神经元模型
神经网络(neural networks)是由具有适应性的简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。
神经网络中最基本的成分是神经元(neuron)模型,即上述所说的“简单单元”。在生物神经网络中,每个神经元与其他神经元相连,当它“兴奋”时,就会向相连的神经元发送化学物质,从而改变这些神经元内的电位;如果某神经元的电位超过了一个“阈值”,那么它就会被激活,即“兴奋”起来,向其他神经元发送化学物质。
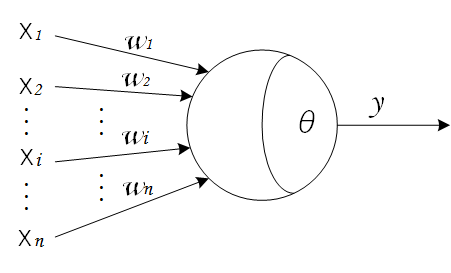
1943 年,McCulloch 和 Pitts 将上述情形抽象为上图所示的简单模型,这就是一直沿用至今的
M-P 神经元模型
。神经元接收来自
n
个其他神经元传递过来的输入信号
x
,这些输入信号通过带权重
w
的连接(connection)进行传递,神经元接收到的总输入值
∑
n
i
=
1
w
i
x
i
将与神经元的阈值
θ
进行比较,然后通过“激活函数”(activation function)
f
处理产生神经元的输出
y
=
f
(
∑
n
i
=
1
w
i
x
i
−
θ
)
。
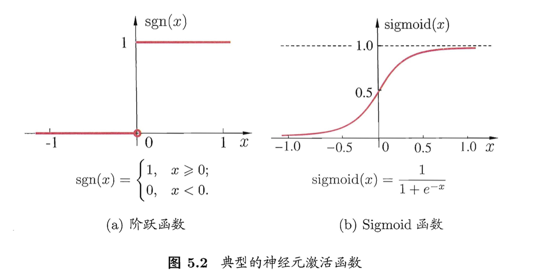
理想中的激活函数是图 5.2(a) 所示的阶跃函数,它将输入值映射为输出值
0
或
1
(
1
对应神经元兴奋,
0
对应神经元抑制)。然而,阶跃函数具有不连续、不光滑等不太好的性质,因此实际常用
Sigmoid
函数(即形似 S 的函数)作为激活函数。
Logistic
函数是典型的
Sigmoid
函数,它如图 5.2(b) 所示把可能在较大范围内变化的输入值挤压到
(
0
,
1
)
输出值范围内,因此有时也称为“挤压函数”(squashing function)。
把许多这样的神经元按一定的层次结构连接起来,就得到了神经网络。事实上,从计算机科学的角度看,我们可以先不考虑神经网络是否真的模拟了生物神经网络,只需将一个神经网络视为包含了许多参数的数学模型,这个模型是若干个函数,例如
y
j
=
f
(
∑
i
w
i
x
i
−
θ
j
)
相互(嵌套)代入而得。有效的神经网络学习算法大多以数学证明为支撑。
例如 10 个神经元两两连接,则有 100 个参数:90 个连接权和 10 个阈值。
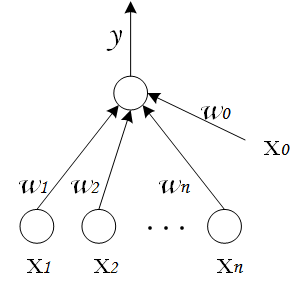
为了简化表示,通常我们把阈值
θ
记为
−
w
0
,并假想有一个附加的常量输入
x
0
=
1
,那么我们就可以把神经元的输入记为
∑
n
i
=
0
w
i
x
i
或以向量形式写为
w
⋅
x
,把输出记为
y
=
f
(
∑
n
i
=
0
w
i
x
i
)
。
2. 感知机
感知机由两层神经网络组成,输入层接收外界输入信号后传递给输出层,输出层是 M-P 神经元,亦称“阈值逻辑单元”(threshold logic unit)。感知机的激活函数
f
就是之前介绍过的阶跃函数,因而我们可以把感知机函数写为:
y
=
sgn
(
w
⋅
x
)
sgn
(
y
)
=
{
1
,
if
y
>
0
0
,
otherwise
可以把感知机看作是
n
维实例空间中的超平面决策面,对于超平面一侧的实例,感知器输出
1
,对于另一侧的实例输出
0
,这个决策超平面方程是
w
⋅
x
=
0
。 那些可以被某一个超平面分割的正反样例集合称为
线性可分(linearly separable)
样例集合,它们就可以使用感知机表示。
与、或、非问题都是线性可分的问题,使用一个有两输入的感知机能容易地表示,例如:
-
“与”
(
x
1
∧
x
2
)
:令
w
1
=
w
2
=
1
,
w
0
=
−
2
,则
y
=
sgn
(
1
⋅
x
1
+
1
⋅
x
2
−
2
)
,仅在
x
1
=
x
2
=
1
时,
y
=
1
; -
“或”
(
x
1
∨
x
2
)
:令
w
1
=
w
2
=
1
,
w
0
=
−
0.5
,则
y
=
sgn
(
1
⋅
x
1
+
1
⋅
x
2
−
0.5
)
,当
x
1
=
1
或
x
2
=
1
时,
y
=
1
; -
“非”
(
¬
x
1
)
:令
w
1
=
−
0.6
,
w
2
=
0
,
w
0
=
0.5
,则
y
=
sgn
(
−
0.6
⋅
x
1
+
0
⋅
x
2
+
0.5
)
,当
x
1
=
1
时,
y
=
0
;当
x
1
=
0
时,
y
=
1
。
感知机训练法则
为得到可接受的权向量,我们会从随机的权值开始,反复地应用这个感知机到每个训练样例,只要它误分类样例就修改感知机的权值。重复这个过程,直到感知机正确分类所有的样例。每一步根据
感知机训练法则(perceptron training rule)
来修改权值,也就是修改与输入
x
i
对应的权
w
i
,法则如下:
w
i
←
w
i
+
Δ
w
i
Δ
w
i
=
η
(
t
−
o
)
x
i
这里
t
是当前训练样例的目标输出,
o
是感知机的输出,
η
是一个正的常数称为
学习速率(learning rate)
。学习速率的作用是缓和每一步调整权的程度,它通常被设为一个小的数值(例如
0.1
),而且有时会使其随着权调整次数的增加而衰减。
直观来看,假定训练样本已被感知机正确分类,这时
(
t
−
o
)
=
0
,
Δ
w
i
=
0
,所以没有权值被修改。如果当目标输出是
1
,而感知机输出是
0
,为了使感知机输出正确的结果,权值必须被修改以增大
w
⋅
x
的值。例如,
x
i
>
0
,那么增大
w
i
会使感知机更接近正确分类的这个示例,因为
(
t
−
o
)
、
η
和
x
i
都是正的。另一方面,如果
t
=
0
而
o
=
1
,那么和正的
x
i
关联的权值会被减小而不是增大。
事实上可以证明,若训练样例线性可分,并且使用了充分小的
η
,那么在有限次地使用感知机训练法则后,训练过程会收敛到一个能正确分类所有训练样例的权向量
w
=
(
w
0
,
w
1
,
⋯
,
w
n
)
。如果数据非线性可分,训练过程将会发生振荡(fluctuation),
w
难以稳定下来,不能求得合适解。
需要注意,感知机只有输出层神经元进行激活函数处理,即只拥有一层功能神经元(functional neuron),其学习能力非常有限。如果遇到非线性可分问题,感知机就无法表示了,例如异或这样简单的非线性可分问题。如果要解决非线性可分问题,需要使用多层功能神经元,例如使用两层的感知机就能解决异或问题:
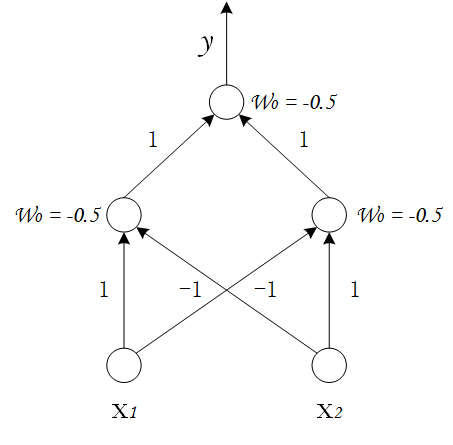
上图中,输入层与输出层之间的一层神经元,被称为隐层或隐含层(hidden layer),隐含层和输出层神经元都是拥有激活函数的功能神经元。在下一篇《神经网络(中):多层前馈神经网络与反向传播算法》中,我们会脱离感知机探讨更为一般的多层网络结构。
参考
周志华《机器学习》
Tom M. Mitchell《机器学习》